/;
It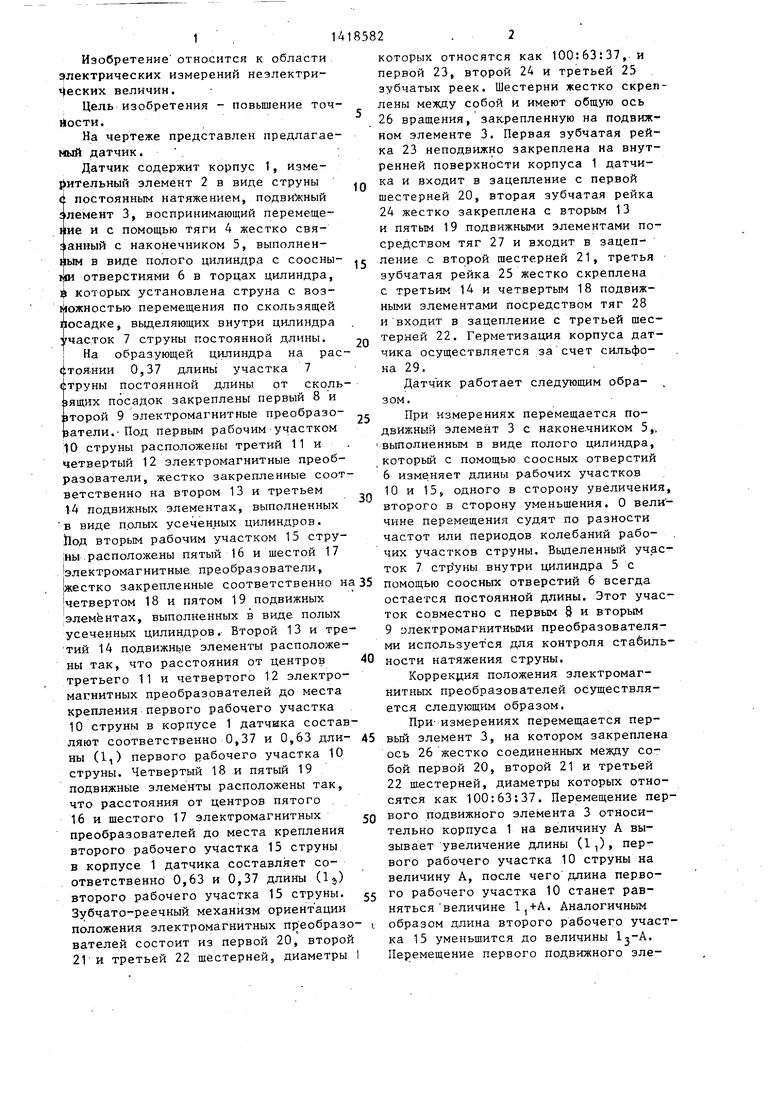
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещения | 2022 |
|
RU2783958C1 |
| Датчик перемещения | 2021 |
|
RU2777515C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2685803C1 |
| Струнный преобразователь перемещения | 2022 |
|
RU2794285C1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Устройство для поэлементного контроля зубчатых колес | 1980 |
|
SU1242705A1 |
| Устройство для измерения массы тела в невесомости | 1981 |
|
SU981831A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Зубчато-реечный механизм | 1990 |
|
SU1778404A1 |
| Центробежная установка для испытания стержневых образцов | 1987 |
|
SU1490554A1 |
Изобретение относится к электрическим измерениям неэлектрических величин и позволяет повысить точность измерений. В корпусе 1 размещен измерительный элемент 2 в виде струны с постоя нным натяжением. При измерениях перемещением подвижного нагружающего элемента 3 с цилиндрическим наконечником 5 с сооснькш отверстиями 6 изменяется длина рабочих участков 10 и 15 струны. Контроль стабильности натяжения струны осуществляется посредством участка 7 постоянной длины и электромагнитными преобразователями 8,9. На оси 26, закрепленной на элементе 3, установлены три шестерни 20-22 с соотношением числа зубьев, равным 100:63:37. Шестерни. 20-22 контактируют с зубчатыми рейками 23-25 соответственно. В корпусе 1 соосно размещены четыре подвижных элемента 13,14,18,19, на. которых жестко закреплены электромагнитные преобразователи 11,12,16, 17. По разности частот или периодов колебаний рабочих участков струны судят о величине перемещения элемента 3. 1 з.п, ф-лы, 1 ил. i (Л
252 25202627,2
I //////
27 28 f3Jf7 12 56 в 9 6 78 J9
I I I I I II till I.
: $SS$$$S SS$$ S$
oo
СЛ
CX) 1C
- /ff 2 27 7 // ff 77
Изобретение относится к области электрических измерений неэлектри- Цеских величин.
Цель изобретения - повышение точ йости.
На чертеже представлен предлагаемый датчик.
Датчик содержит корпус 1, изме- 1 ительный элемент 2 в виде струны с; постоянным натяжением, подвижный г лемент 3, воспринимающий перемещение и с помощью тяги 4 жестко свя- : анный с наконечником 5, выполненным в виде полого цилиндра с соосны {lи отверстиями 6 в торцах цилиндра, И которых установлена струна с воз ожностьк перемещения по скользящей осадке, выделяющих внутри цилиндра участок 7 струны постоянной длины.
I На образующей цилиндра на ра (|;тоя.нии 0,37 длины участка 7 струны постоянной длины от скол}ящих посадок закреплены первый 8 и :аторой 9 электромагнитные преобраэо}атели.-Под первым рабочим участком
10 струны расположены третий 11 и четвертый 12 электромагнитные преоб
разователи, жестко закрепленные соответственно на втором 13 и третьем 14 подвижных элементах, выполненных в виде полых усеченных цилиндров. Йод вторым рабочим участком 15 стру- ;ны .расположены пятый 16 и шестой 17 Электромагнитные преобразователи.
1жестко закрепленные соответственно на 35 помощью соосных отверстий 6 всегда
|четвертом 18 и пятом 19 подвижных элементах, выполненных в виде полых усеченных: цилиндров . Второй 13 и тре- тий 14 подвижные элементы расположены так, что расстояния от центров третьего 11 и четвертого 12 электромагнитных преобразователей до места крепления первого рабочего участка 10 струны в корпусе 1 датчика состав50
ляют соответственно 0,37 и 0,63 дли- 45 вый элемент 3, на котором закреплена ны (1д) первого рабочего участка 10 струны. Четвертый 18 и пятый 19 подвижные элементы расположены так, что расстояния от центров пятого 16 и шестого 17 электромагнитных преобразователей до места крепления второго рабочего участка 15 струны в корпусе 1 датчика составляет соответственно 0,63 и 0,37 длины (Ij) второго рабочего участка 15 струны. Зубчато-реечный механизм ориент ации положения электромагнитных пр еобразо- вателей состоит из первой 20, второй 21 И третьей 22 шестерней, диаметры I
55
ось 26 жестко соединенных между собой первой 20, второй 21 и третьей 22 шестерней, диаметры которых относятся как 100:63:37. Перемещение первого подвижного элемента 3 относительно корпуса 1 на величину А вызывает увеличение длины (1,), первого рабочего участка 10 струны на величину А, после чего длина первого рабочего участка 10 станет равняться величине 1,+А. Аналогичным образом длина второго рабочего участка 15 уменьшится до величины . Перемещение первого подвижного эле
которых относятся как 100:63:37,. и первой 23, второй 24 и третьей 25 зубчатых реек. Шестерни жестко скреплены между собой и имеют общую ось 26 вращения, закрепленную на подвижном элементе 3. Первая зубчатая рейка 23 неподвижно закреплена на внутренней поверхности корпуса 1 датчика и входит в зацепление с первой шестерней 20, вторая зубчатая рейка 24 жестко закреплена с вторым 13 и пятьп 19 .подвижными элементами посредством тяг 27 и входит в зацепление с второй шестерней 21, третья зубчатая рейка 25 жестко скреплена с третьим 14 и четвертым 18 подвижными элементами посредством тяг 28 и входит в зацепление с третьей шестерней 22. Герметизация корпуса датчика осуществляется за счет сштьфо- на 29.
Датчик работает следующим образом.
При измерениях перемещается подвижный элемент 3 с наконечником 5,. вьшояненным в виде полого цилиндра, который с помощью соосных отверстий 6 изменяет длины рабочих участков 10 и 15, одного в сторону увеличения, второго в сторону уменьшения, О вели - чине перемещения судят по разности частот или периодов колебаний рабочих участков струны. Выделенньш участок 7 стр уны внутри цилиндра 5 с
0
остается постоянной длины. Этот участок совместно с первым 8 и вторым 9 электромагнитньми преобразователями используется для контроля стабильности натяжения струны.
Коррекция положения электромагнитных преобразователей осуществляется следующим образом.
При- измерениях перемещается пер
вый элемент 3, на котором закреплена
ось 26 жестко соединенных между собой первой 20, второй 21 и третьей 22 шестерней, диаметры которых относятся как 100:63:37. Перемещение первого подвижного элемента 3 относительно корпуса 1 на величину А вызывает увеличение длины (1,), первого рабочего участка 10 струны на величину А, после чего длина первого рабочего участка 10 станет равняться величине 1,+А. Аналогичным образом длина второго рабочего участка 15 уменьшится до величины . Перемещение первого подвижного элемента 3 вызывает вращение блока шестерней, а следовательно, и перемещение второй зубчатой рейки 24 на величину 0,63А, а третья зубчатой рейки 25 на величину 0,37А относительно оси 26, Таким образом, расстояние третьего электромагнитного преобразователя 11 от места закрепления перво го рабочего участка 10 струны в корпусе 1 становится равным 0,37(), а расстояние четвертого электромагнитного преобразователя 12 от места закрепления первого рабочего участка 10 струны в корпусе 1 -0,63() . Аналогично можно доказать, что расстояние электромагнитного преобразователя 16 от места закрепления второго рабочего участка 15 струны в корпусе 1 равно 0,63(), расстояние шестого электромагнитного преобразователя 17 от места закрепления второго рабочего участка 15 струны в корпусе 1-0,37(lj-A)
10
15
20
осных отверстия, три электромагнитных преобразователя, первый из которых закреплен на наконечнике, и упругий элемент, связанный с нагружаю- щим элементом, отличающий- с я тем, что, с целью повьпиения точности, он снабжен установленными соосно в корпусе четырьмя подвижными элементами, тремя шестернями с за- данньм соотношением числа зубьев, жестко закрепленными на оси, установленной на подвижном нагружающем элементе, и тремя зубчатыми рейками, первая из которьк закреплена в корпусе с возможностью взаимодействия с большей шестерней, вторая - со средней шестерней, третья - с малой шестерней, при этом третья рейка связана с двумя подвижными элементами, расположенными по разные стороны от наконечника , вторая рейка - с двумя подвижными элементами, расположенными по разные стороны от первых
Таким образом, расстояние от цент- 25 Двух подвижных элементов, на наконечров электромагнитньге преобразователей при любом положении подвижного элемента 3 сохраняется равным 0,37 длины рабочих участков струны от точек их закрепления в корпусе датчика или скользящих посадок наконечника 5, Датчик при этом в целом обеспечивает колебание всех трех участков струны на первой гармонике с максимально возможным подавлением высших гармоник независимо от положения первого подвижного элемента 3.
Формула изобретения
35
40
нике установлен второй электромагнитный преобразователь, а на каждом подвижном элементе установлено по одному электромагнитному преобразователю на расстоянии, пропорциональном заданному соотношению числа зубьев от длины рабочих участков струн от точки закрепления в корпусе, а электромагнитные преобразователи, установленные на наконечнике, разнесены на расстояние, пропорциональное этому же соотношению от длины участка струны между двумя соосными отверстиями.
осных отверстия, три электромагнитных преобразователя, первый из которых закреплен на наконечнике, и упругий элемент, связанный с нагружаю- щим элементом, отличающий- с я тем, что, с целью повьпиения точности, он снабжен установленными соосно в корпусе четырьмя подвижными элементами, тремя шестернями с за- данньм соотношением числа зубьев, жестко закрепленными на оси, установленной на подвижном нагружающем элементе, и тремя зубчатыми рейками, первая из которьк закреплена в корпусе с возможностью взаимодействия с большей шестерней, вторая - со средней шестерней, третья - с малой шестерней, при этом третья рейка связана с двумя подвижными элементами, расположенными по разные стороны от наконечника , вторая рейка - с двумя подвижными элементами, расположенными по разные стороны от первых
0
5
0
нике установлен второй электромагнитный преобразователь, а на каждом подвижном элементе установлено по одному электромагнитному преобразователю на расстоянии, пропорциональном заданному соотношению числа зубьев от длины рабочих участков струн от точки закрепления в корпусе, а электромагнитные преобразователи, установленные на наконечнике, разнесены на расстояние, пропорциональное этому же соотношению от длины участка струны между двумя соосными отверстиями.
| ДАТЧИК | 0 |
|
SU372464A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик | 1975 |
|
SU583371A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
