Изобретение относится к области электрических измерений неэлектрических, в частности перемещений, величин и может использоваться в системах мониторинга технического состояния зданий и сооружений.
Известен датчик перемещений, содержащий корпус, измерительный элемент в виде струны с постоянным натяжением, подвижный элемент, воспринимающий перемещение и с помощью тяг, связанный с наконечником, выполненным в виде полого цилиндра с отверстиями в торцах цилиндра, в которых установлена струна с возможностью перемещения по скользящей посадке, выделяющим внутри цилиндра участок струны постоянной длины. На образующей цилиндра в средней его части расположен преобразователь натяжения струны в электрический сигнал. Под рабочими участками струны, расположенными за пределами цилиндра, размещены два преобразователя измеряемой величины в электрический сигнал, при этом герметизация корпуса осуществлена за счет сильфона (SU №583371, G01В 17/04, G01L 1/10, 05.12.1977).
Основным недостатком данного изобретения является низкая точность измерения, что обусловлено наличием сопротивления движению струны в посадке. Во-первых, при перемещениях посадка меняет силу натяжения струны на всех трех участках струны, чем снижает точность измерения, во-вторых, в процессе эксплуатации ввиду трения уменьшается сечение струны на участке контакта струны с посадкой и тем самым изменяется частота ее колебания, которая является информативным параметром датчика. Кроме того, датчик не позволяет, контролировать максимальное значение измеряемого параметра за весь период эксплуатации датчика.
Известен датчик перемещения, содержащий корпус с измерительным элементом в виде струны с постоянным натяжением, подвижный элемент, воспринимающий перемещение и с помощью тяг, связанный с первым наконечником, выполненным в виде полого цилиндра с отверстиями в торцах цилиндр, в которых установлена струна с возможностью перемещения по скользящим посадкам, выделяющим внутри цилиндра участок струны постоянной длины, на образующей цилиндра в средней его части расположен первый преобразователь натяжения струны в электрический сигнал, под первым и вторым рабочими участками струны, расположенными за пределами цилиндра первого наконечника, размещены второй и третий преобразователи измеряемой величины в электрический сигнал, причем второй преобразователь закреплен на корпусе датчика перемещения, герметизация корпуса датчика перемещения осуществлена за счет сильфона, датчик перемещения снабжен вторым подвижным наконечником в виде полого цилиндра с закрепленным на нем храповиком реечного типа, собачка и прижимная пружина которого закреплены на корпусе датчика перемещения, а третий преобразователь закреплен в полости второго подвижного наконечника, который имеет соосные с основным подвижным наконечником отверстия, в одном из которых имеется скользящая посадка, выделяющая второй рабочий участок струны (RU №2685803, G01L 1/10, 23.04.2019).
Существенным недостатком известного датчика перемещения является низкая точность измерения, что обусловлено наличием сопротивления движению струны в посадках, что изменяет силу натяжения струны на всех трех участках струны, а, следовательно, и снижает точность измерения,
Задачей заявляемого технического решения является создание датчика перемещения, в котором в процессе измерения обеспечивается постоянство напряжения в струне, т.е. при выполнении измерения отсутствует изменение силы натяжения струны на всех трех ее участках, а, следовательно, и повышается точность измерения.
Технический результат достигается тем, что в датчике перемещения, содержащем корпус, измерительный элемент в виде струны с постоянным натяжением, подвижный элемент, воспринимающий перемещение, первый наконечник, выполненный в виде полого цилиндра, на внутренней образующей цилиндра первого наконечника в средней его части под третьим рабочим участком струны расположен первый преобразователь натяжения струны в электрический сигнал, под первым рабочим участком струны, расположенным за пределом цилиндра первого наконечника, размещен второй преобразователь измеряемой величины в электрический сигнал, закрепленный на корпусе датчика перемещения, на внутренней образующей цилиндра второго наконечника под вторым рабочим участком струны расположен третий преобразователь натяжения струны в электрический сигнал, второй подвижный наконечник выполнен в виде полого цилиндра с закрепленным на нем храповиком реечного типа, собачка и прижимная пружина которого закреплены на корпусе датчика перемещения, для проводки кабелей внутри датчика используются соосные отверстия в корпусе, а также в первом и втором наконечниках, герметизация корпуса датчика перемещения осуществлена за счет сильфона, отличающийся тем, что на внутренней образующей второго наконечника расположен один, а на внутренней образующей первого наконечника, два электромагнита, состоящих из катушки, ферромагнитного сердечника с жесткой немагнитной прокладкой, подвижного якоря с жесткой немагнитной прокладкой и пружины, а в корпусе датчика перемещения выполнена продольная сквозная проточка для пропуска стрежня, жестко соединяющего первый подвижный наконечник с подвижным элементом.
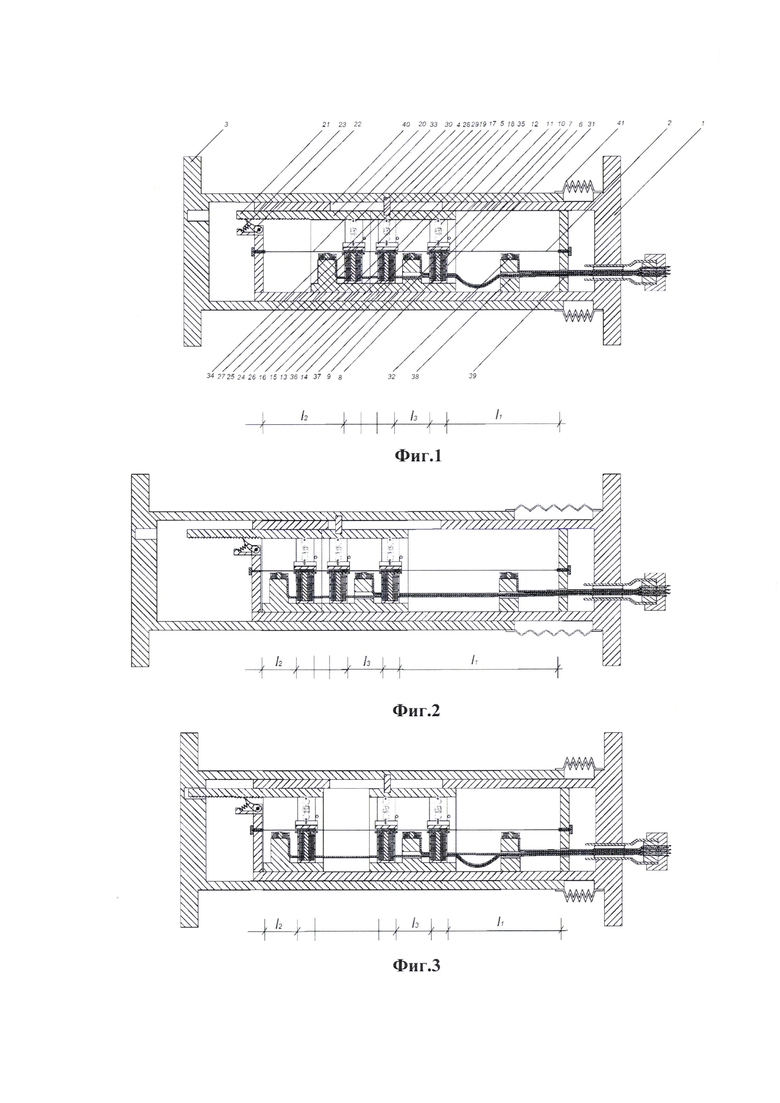
На фиг. 1 представлено положение элементов датчика перемещения в момент установки его на объект (момент времени t0), на фиг. 2 представлено положение элементов датчика перемещения при достижении максимально возможного перемещения, на фиг. 3 представлено положение элементов датчика перемещения при текущем значении перемещения, величина которого ниже максимального значения за весь предыдущий период измерения фиг. 4, фиг. 5, фиг. 6.
Корпус датчика перемещения (1) содержит измерительный элемент (2) в виде струны с постоянным натяжением, подвижный элемент (3), воспринимающий перемещение и с помощью стержня (4), связанный с первым подвижным наконечником (5), выполненным в виде полого цилиндра с расположенными на его внутренней образующей первым электромагнитом (6), состоящим из первой электромагнитной катушки (7), первого сердечника (8) с первой жесткой немагнитной прокладкой (9), первого подвижного якоря (10) со второй жесткой немагнитной прокладкой (11) и первой пружины (12) и вторым электромагнитом (13), состоящим из второй электромагнитной катушки (14), второго сердечника (15) с жесткой немагнитной прокладкой (16), второго подвижного якоря (17) с жесткой немагнитной прокладкой (18) и второй пружины (19). Соосно с первым подвижным наконечником (5) расположен второй подвижный наконечник (20), выполненный в виде полого цилиндра с закрепленным на нем храповиком реечного типа (21), собачка (22) и прижимная пружина (23) которого закреплены на корпусе датчика перемещения (1), а на внутренней образующей второго подвижного наконечник (20), расположен третий, электромагнит (24), состоящий из третьей электромагнитной катушки (25), третьего сердечника (26) с жесткой немагнитной прокладкой (27), третьего подвижного якоря (28) с жесткой немагнитной прокладкой (29) и третьей пружины (30). При включенном питании первого (7) второго (13) и третьего (24) электромагнитов последние делят струну (2) на три рабочих участка:  (31), под которым на внутренней образующей корпуса датчика перемещения (1) располагается второй преобразователь (32) натяжения струны в электрический сигнал;
(31), под которым на внутренней образующей корпуса датчика перемещения (1) располагается второй преобразователь (32) натяжения струны в электрический сигнал;  (33), под которым на внутренней образующей второго подвижного наконечника (20) располагается третий преобразователь (34) натяжения струны в электрический сигнал;
(33), под которым на внутренней образующей второго подвижного наконечника (20) располагается третий преобразователь (34) натяжения струны в электрический сигнал;  (35), под которым на внутренней образующей первого подвижного наконечника (5) располагается первый преобразователь (36) натяжения струны в электрический сигнал. Для пропуска кабелей от преобразователей (32, 34, 36) натяжения струны в электрический сигнал и электромагнитов (6, 13, 24) используются соосные отверстия (37, 38, 39), а для пропуска стержня (4) используется продольная проточка (40) в корпусе датчика перемещения (1). Герметизация корпуса (1) осуществлена за счет сильфона (41).
(35), под которым на внутренней образующей первого подвижного наконечника (5) располагается первый преобразователь (36) натяжения струны в электрический сигнал. Для пропуска кабелей от преобразователей (32, 34, 36) натяжения струны в электрический сигнал и электромагнитов (6, 13, 24) используются соосные отверстия (37, 38, 39), а для пропуска стержня (4) используется продольная проточка (40) в корпусе датчика перемещения (1). Герметизация корпуса (1) осуществлена за счет сильфона (41).
Принцип работы датчика перемещения.
В целях исключения износа струны (2) питание первого (7), второго (13) и третьего (24) электромагнитов включается только на время проведения измерений. При выключенном питании первого (7), второго (13) и третьего (24) электромагнитов их подвижные якоря (10, 17, 28) отжаты от струны (2) пружинами (12, 19 и 30) и контакт жестких немагнитных прокладок (9, 11, 16, 18, 27, 29) со струной отсутствует. При этом зазор между струной и жесткими немагнитными прокладками сердечников устанавливается минимальным.
Далее рассмотрена работа датчика перемещения при включенном питании первого (7) второго (13) и третьего (24) электромагнитов.
При включении питания первого (7), второго (13) и третьего (24) электромагнитов их подвижные якоря притягиваются к неподвижным сердечникам и прижимают струну (2) своими жесткими немагнитными прокладками (9, 11, 16, 18, 27, 29), деля ее на три рабочих участка ( (31),  (33),
(33),  (35)).
(35)).
При включенном питании электромагнитов контроль стабильности колебания струны производится по частоте колебаний ее третьего участка  (35), по показаниям первого (36) преобразователя натяжения струны в электрический сигнал, а контроль текущего и максимального значения измеряемой величины производится соответственно по частоте колебаний первого
(35), по показаниям первого (36) преобразователя натяжения струны в электрический сигнал, а контроль текущего и максимального значения измеряемой величины производится соответственно по частоте колебаний первого  (31), и второго рабочих участков
(31), и второго рабочих участков  (33) струны, по показаниям второго (32) и третьего (34) преобразователей натяжения струны в электрический сигнал.
(33) струны, по показаниям второго (32) и третьего (34) преобразователей натяжения струны в электрический сигнал.
Положение конструктивных элементов датчика перемещения в начальный момент времени t0 (в момент установки на объекте, когда перемещение  ) представлено на фиг. 1.
) представлено на фиг. 1.
На фиг. 4 представлена диаграмма изменения значения измеряемого параметра по значениям выходного сигнала второго (32) преобразователя при постоянно включенной вторичной аппаратуре системы мониторинга, на фиг. 5 представлена диаграмма изменения максимального значения измеряемого параметра по значениям выходного сигнала третьего (34) преобразователя, на фиг. 6 представлена диаграмма изменения значения измеряемого параметра по значениям выходного сигнала второго (32) преобразователя в случае отключения вторичной аппаратуры системы мониторинга на интервале времени t1 - t3.
При измерении перемещения (перемещении на некоторую величину  ) подвижный элемент (3), жестко скрепленный с стержня (4) с первым подвижным наконечником (5), перемещается относительно корпуса (1) на величину перемещений
) подвижный элемент (3), жестко скрепленный с стержня (4) с первым подвижным наконечником (5), перемещается относительно корпуса (1) на величину перемещений  , изменяя (увеличивая) рабочую длину
, изменяя (увеличивая) рабочую длину  первого рабочего участка струны (31) на величину перемещений
первого рабочего участка струны (31) на величину перемещений  . На такую же величину сместится второй подвижный наконечник (20), уменьшив длину второго рабочего участка струны
. На такую же величину сместится второй подвижный наконечник (20), уменьшив длину второго рабочего участка струны  на такую же величину
на такую же величину  .
.
Величину текущего значения перемещения определяют по частоте колебаний первого рабочего участка струны (31), а величину максимального значения перемещения - по частоте колебаний второго рабочего участка струны (33).
При этом второй подвижный наконечник (20) свободно перемещается относительно корпуса (1) датчика перемещения вместе с первым подвижным наконечником (5) до достижения максимального значения на момент проведения измерения  . Как только текущее значение перемещения начнет уменьшаться (в момент времени t1), сработает «собачка» (22) храповика, зафиксировав максимальное значение перемещения
. Как только текущее значение перемещения начнет уменьшаться (в момент времени t1), сработает «собачка» (22) храповика, зафиксировав максимальное значение перемещения  за все время измерения, а первый подвижный наконечник (5) продолжит свое движение в сторону меньших значений перемещения. Если за все время последующих измерений значение перемещений не превысит величины
за все время измерения, а первый подвижный наконечник (5) продолжит свое движение в сторону меньших значений перемещения. Если за все время последующих измерений значение перемещений не превысит величины  , положение второго подвижного наконечника (20) не изменится, а частота колебаний второго рабочего участка струны (33) будет оставаться постоянной, соответствующей значению перемещения в момент времени t1.
, положение второго подвижного наконечника (20) не изменится, а частота колебаний второго рабочего участка струны (33) будет оставаться постоянной, соответствующей значению перемещения в момент времени t1.
При превышении значения перемещения величины  , т.е. значение перемещения начнет увеличиваться относительно своего значения в момент времени t1, первый подвижный наконечник (5) начнет перемещать второй подвижный наконечник (20) в сторону больших значений перемещений, а при уменьшении значения перемещения (в момент времени t2), снова сработает «собачка» (22) храповика, зафиксировав максимальное значение перемещения за все время измерения
, т.е. значение перемещения начнет увеличиваться относительно своего значения в момент времени t1, первый подвижный наконечник (5) начнет перемещать второй подвижный наконечник (20) в сторону больших значений перемещений, а при уменьшении значения перемещения (в момент времени t2), снова сработает «собачка» (22) храповика, зафиксировав максимальное значение перемещения за все время измерения  , а первый подвижный наконечник (5) продолжит свое движение в сторону меньших значений перемещения. Данный процесс будет повторяться каждый раз, когда измеряемая величина превысит значение предыдущего максимума.
, а первый подвижный наконечник (5) продолжит свое движение в сторону меньших значений перемещения. Данный процесс будет повторяться каждый раз, когда измеряемая величина превысит значение предыдущего максимума.
Таким образом, при включенном питании вторичной аппаратуры датчик перемещения позволяет получать следующую информацию:
- с выхода первого преобразователя (36) натяжения струны в электрический сигнал - информацию (частоту или период колебания участка (35) струны постоянной длины  ), которая используется для контроля постоянства силы натяжения струны (2);
), которая используется для контроля постоянства силы натяжения струны (2);
- с выхода второго преобразователя (32) измеряемой величины в электрический сигнал - информацию (частоту или период колебания первого рабочего участка  струны (31)), которая используется для контроля текущего значения измеряемой величины
струны (31)), которая используется для контроля текущего значения измеряемой величины  ;
;
- с выхода третьего преобразователя (34) измеряемой величины в электрический сигнал - информацию (частоту или период колебания второго рабочего участка  струны участка (33)), которая используется для контроля максимального значения измеряемого параметра за весь период эксплуатации датчика.
струны участка (33)), которая используется для контроля максимального значения измеряемого параметра за весь период эксплуатации датчика.
При отключенном питании вторичной аппаратуры (интервал времени от t1 до t3, например, в случае аварии, см. фиг. 6) информация с выходов преобразователей (32, 34, 36) измеряемой величины в электрический сигнал не поступает.
При восстановлении питания вторичной аппаратуры (момент времени t3 фиг. 6) с выходов датчика перемещения, появляется возможность получить информацию (значение частоты или периода колебания участка струны постоянной длины), которая используется для контроля постоянства силы натяжения струны, и информацию (значение частоты или периода колебания рабочих участков), которая используется только для контроля текущего значения измеряемого параметра, а также получить информацию о максимальном значении измеряемого параметра на интервале времени от t1 до t3, например, в случае аварии. При включении питании вторичной аппаратуры (в момент времени t3) датчик перемещения позволяет получать следующую информацию:
- с выхода первого преобразователя (36) натяжения струны в электрический сигнал - информацию (частоту или период колебания участка (35) струны постоянной длины  ), которая используется для контроля постоянства силы натяжения струны (2);
), которая используется для контроля постоянства силы натяжения струны (2);
- с выхода второго преобразователя (32) измеряемой величины в электрический сигнал - информацию (частоту или период колебания первого рабочего участка  струны (31)), которая используется для контроля текущего значения измеряемой величины
струны (31)), которая используется для контроля текущего значения измеряемой величины  ;
;
- с выхода третьего преобразователя (34) измеряемой величины в электрический сигнал - информацию (частоту или период колебания второго рабочего участка  струны участка (33)), которая используется для контроля максимального значения измеряемого параметра за весь период эксплуатации датчика (на интервале времени от t0 до t).
струны участка (33)), которая используется для контроля максимального значения измеряемого параметра за весь период эксплуатации датчика (на интервале времени от t0 до t).
Основное преимущество предлагаемого датчика перемещения состоит в том, что благодаря обеспечению постоянства механических напряжений по длине струны при выполнении измерения отсутствует изменение силы натяжения струны на всех трех ее рабочих участках, а, следовательно, повышается точность измерения.
Сопоставительный анализ изобретения позволяет сделать вывод, что новым является, то что для обеспечения постоянства силы натяжения струны датчика на всех трех ее рабочих участках, датчик перемещения снабжен расположенными на внутренней образующей второго наконечника одним, а на внутренней образующей первого наконечника, двумя электромагнита, состоящими из катушки, ферромагнитного сердечника с жесткой немагнитной прокладкой, подвижного якоря с жесткой немагнитной прокладкой и пружины, а в корпусе датчика перемещения выполнена продольная сквозная проточка для пропуска стрежня, жестко соединяющего первый подвижный наконечник с подвижным элементом.
На дату подачи заявки совокупность признаков заявленного датчика перемещения не известна, что определяет по мнению заявителя, соответствие критерию - «новизна». Сравнение предлагаемого решения с другими техническими решениями в данной области техники позволяет сделать вывод о соответствии критерию изобретения - «изобретательский уровень».
Изобретение позволяет повысить точность измерения текущих и максимальных за весь период измерения значений перемещения за счет устранения сопротивления движению струны в посадке и обеспечения постоянства механических напряжений в струне при выполнении измерения за счет устранения изменения силы натяжения струны на всех трех ее рабочих участках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Струнный преобразователь перемещения | 2022 |
|
RU2794285C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2685803C1 |
| Датчик перемещения | 2021 |
|
RU2777515C1 |
| Измерительная головка | 1990 |
|
SU1780929A1 |
| Струнный датчик | 1986 |
|
SU1418582A1 |
| Измерительная головка | 1990 |
|
SU1780930A1 |
| СПОСОБ ДИСТАНЦИОННОГО ТЕСТИРОВАНИЯ БЛОКА АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2271015C1 |
| Устройство для измерения размерного износа и положения режущего инструмента в токарных станках | 1987 |
|
SU1442370A1 |
| ДАТЧИК | 1973 |
|
SU372464A1 |
| Устройство для измерения износа и положения режущего инструмента в токарных станках | 1990 |
|
SU1757847A1 |
Изобретение относится к области электрических измерений перемещений в системах мониторинга технического состояния зданий и сооружений. Датчик перемещения содержит корпус, измерительный элемент в виде струны с постоянным натяжением, подвижный элемент, первый подвижный наконечник в виде полого цилиндра, первый преобразователь натяжения струны, под первым рабочим участком струны размещен второй преобразователь. На внутренней образующей цилиндра второго подвижного наконечника расположен третий преобразователь, второй подвижный наконечник в виде полого цилиндра с закрепленным на нем храповиком реечного типа, собачка и прижимная пружина которого закреплены на корпусе датчика перемещения. На внутренней образующей второго подвижного наконечника расположен один, а на внутренней образующей первого подвижного наконечника два электромагнита, каждый из которых состоит из катушки, ферромагнитного сердечника с жесткой немагнитной прокладкой, подвижного якоря с жесткой немагнитной прокладкой и пружины, в корпусе датчика выполнена продольная сквозная проточка для пропуска стержня, жестко соединяющего первый подвижный наконечник с подвижным элементом. Технический результат - повышение точности измерения перемещения. 6 ил.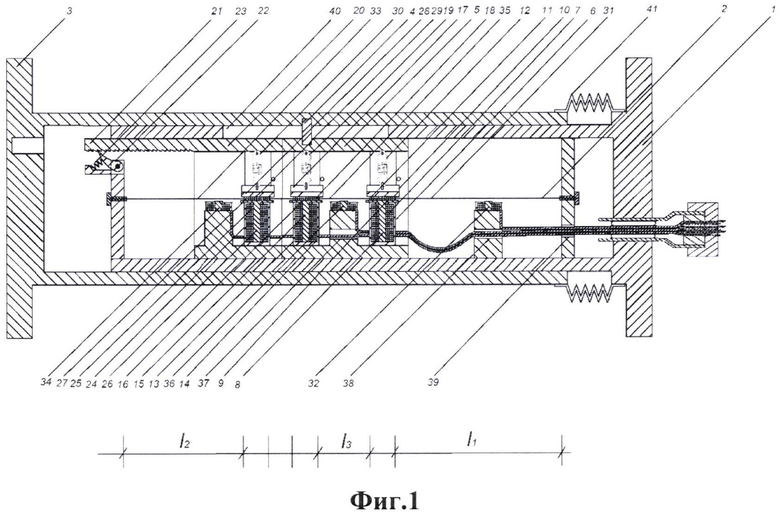
Датчик перемещения, содержащий корпус, измерительный элемент в виде струны с постоянным натяжением, подвижный элемент, воспринимающий перемещение, первый подвижный наконечник, выполненный в виде полого цилиндра, на внутренней образующей которого в средней его части под третьим рабочим участком струны расположен первый преобразователь натяжения струны в электрический сигнал, под первым рабочим участком струны, расположенным за пределом цилиндра первого подвижного наконечника, размещен второй преобразователь измеряемой величины в электрический сигнал, закрепленный на корпусе датчика перемещения, на внутренней образующей цилиндра второго подвижного наконечника под вторым рабочим участком струны расположен третий преобразователь натяжения струны в электрический сигнал, второй подвижный наконечник выполнен в виде полого цилиндра с закрепленным на нем храповиком реечного типа, собачка и прижимная пружина которого закреплены на корпусе датчика перемещения, для проводки кабелей внутри датчика используются соосные отверстия в корпусе, а также в первом и втором подвижном наконечнике, герметизация корпуса датчика перемещения осуществлена за счет сильфона, отличающийся тем, что на внутренней образующей второго подвижного наконечника расположен один, а на внутренней образующей первого подвижного наконечника два электромагнита, каждый из которых состоит из катушки, ферромагнитного сердечника с жесткой немагнитной прокладкой, подвижного якоря с жесткой немагнитной прокладкой и пружины, а в корпусе датчика перемещения выполнена продольная сквозная проточка для пропуска стержня, жестко соединяющего первый подвижный наконечник с подвижным элементом.
| ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2685803C1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ НЕПРЕРЫВНЫХ КОЛЕБАНИЙ СТРУНЫ | 2018 |
|
RU2689283C1 |
| Струнный датчик | 1986 |
|
SU1418582A1 |
| ИНДУКТИВНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2001 |
|
RU2192619C1 |
| US 4858145 A1, 15.08.1989. | |||

