1
Изобретение относится к устройствам для измерения массы тел в невесомости, преимущественно деформируемых тел со сложной формой, (в частности животных).
Известны устройства аналогичного назначения, содержащие держатель тела, связанный с колебательной системой, и анализатор параметров колебаний l.
Устройства, основанные на колебательном принципе, непригодны или дают низкую точность в случае деформируемых тел или при определении массы живых объектов с активными внутренними силами, из-за перераспределения энергии колебаний между внешними и внутренними связя1 1и тела.
Наиболее близким к предлагаемому, является устройство для измерения массы тела в невесомости, содержащее держатель тела, корпус, установлен- : ные в корпусе привод вращения, преобразователь вращательного движения в ускоренное поступательное, взаимодействующий с приводом и кинематически связанный с держателем, а также измеритель параметра движения держателя, связанный с регистрирующей .аппаратурой.2.
Данное устройство позволяет умень шить, взаимодействие колебаний на
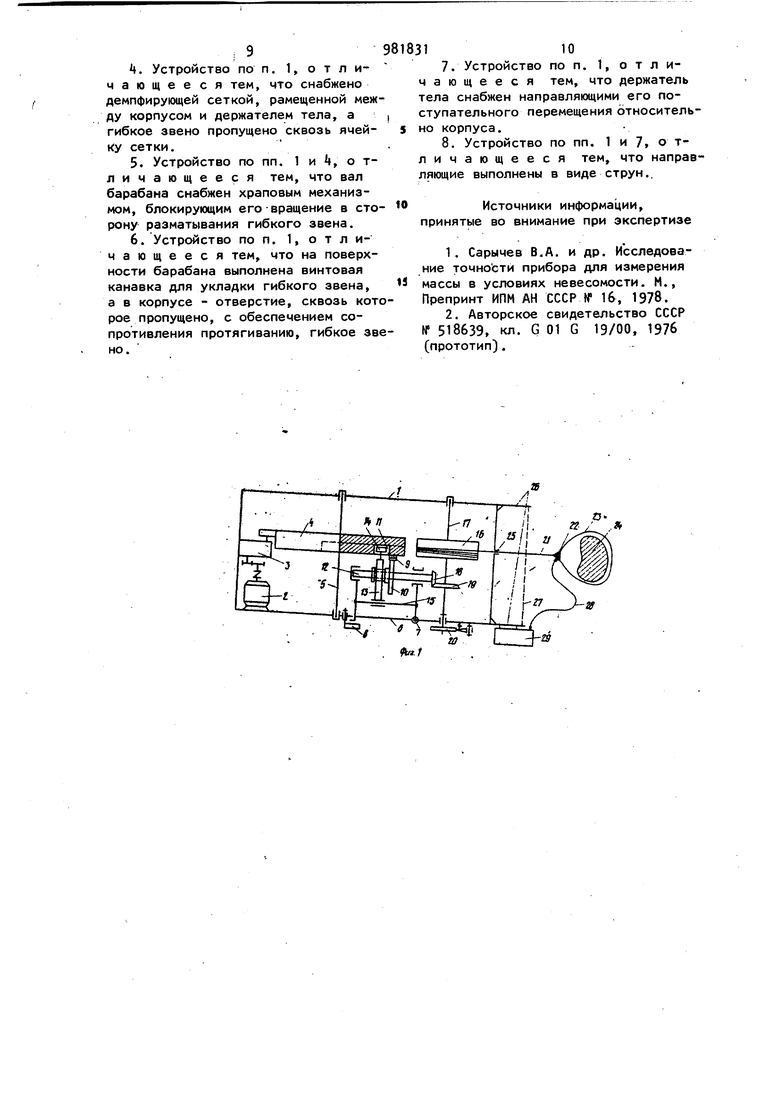
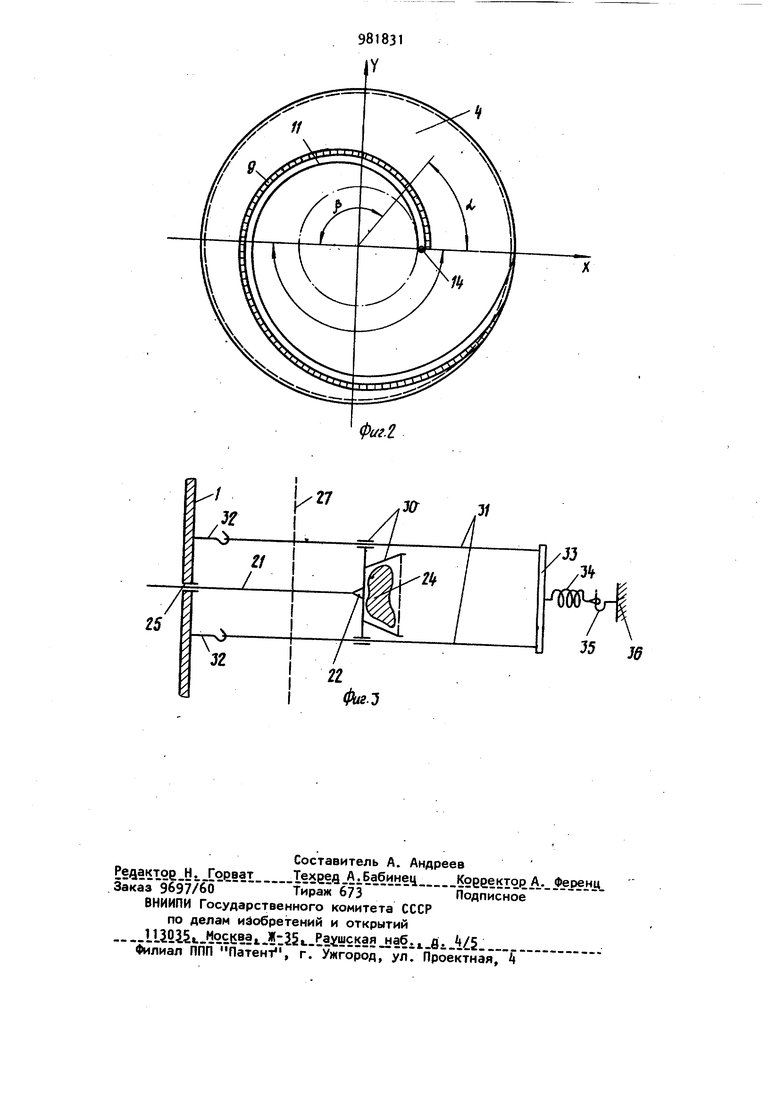
10 внешних и внутренних связах, однако в силу своих конструктивных особенностей- (выполнения преобразователя в виде спиральной пружины, а кинематической связи - в виде жесткой 5 планки), это устройство ограничено по диапазону измеряемых масс и продолжительности переходного процесса. Кроме того, ввиду существенной упругости преобразователя, затруд 20ненс) обеспечение постоянного уровня ускорения, а значит - точности изме-; рений в случае тел со значительной деформируемостью, в особенности жи39вых существ. Наконец, ступенчатый х рактер включения ускоряющей силы мо жет вызвать нежелательную реакцию последних. Целью изобретения является расши рение диапазона измеряемых масс и повышение точности измерений за сче уменьшения влияния деформаций тела на ;эежим работы устройства. Указанная цель достигается тем, что в устройстве, содержащем держатель тела, корпус, установленные в корпусе привод вращения, преобразователь вращательного движения в ускоренное поступ тельное, взаимодействующий с приводом и кинематически связанный с держателем, а так же измеритель параметра движения де жателя, связанный с.регистрирующей аппаратурой, преобразователь выполн в виде вариатора, содержащего задающее колесо, связанное через редуктор с приводом, закрепленный на валу барабан и передаточный механиз взаимодействующий с колесом и валом причем держатель тела связан с бара баном посредством гибкого звена, а измеритель параметра движения держа теля выполнен в виде датчика натяжения этого звена. Кроме того, на торце задающего колеса выполнена канавка с профилир ванным контуром, вдоль кромки которой образована зубчатая направляющая, а передаточный механизм содержит водило с роликом, размещенным в канавке, установленный в опорах на раме корпуса ведущий вал и шесте ню, посаженную на гая с возможность перемещения вдоль него, зафиксирова ную от проворачивания на валу и вза модействующую с зубчатой направляющей , причем водило установлено на раме с возможностью поступательного перемещения параллельно плоскости торца задающего колеса и соединено с шестерней, а на ведущем валу закреплено коническое зубчатое колесо введенное в зацепление с ответным .зубчатым колесом, закрепленным на валу барабана. С целью повышения эксплуатационных качеств устройства, в нем рама может быть шарнирно связана с корпусом и снабжена фиксатором ее рабочего положения, а редуктор может быть снабжен переключателем на нейтральную ступень. Для торможения держателя с телом может быть предусмотрена демпфирующая сетка, размещенная между корпусом и держателем, а гибкое звено пропущено сквозь ячейку сетки. Для предотвращения отскока вал барабана снабжен храповым механизмом, блокирующим его вращение в сторюну разматывания гибкого звена. На поверхности барабана может быть выполнена винтовая канавка для укладки гибкого звена, а в корпусе отверстие, сквозь которое пропущено, с обеспечением сопротивления протягиванию, гибкое звено. При проведении некоторых измерений держатель тела может быть снаб- , жен направляющими его поступательного перемещения относительно корпуса устройства, причем направляющие целесообразно выполнить в виде струн. На фиг. 1 представлена кинематическая схема устройства для измерения массы тела в невесомости, основанного на применении лобового вариат тора с программно изменяемым коэффициентом передачи J на фиг. 2 - фор-, ма контура канавки задающего колеса, реализующего программное управление | передаточным числом лобового вариатора; на фиг, 3 направляющие в виде струн, по которым движется платформа с телом, массу которого определяют. Устройство для измерения массы в условиях невесомости содержит корпус 1, в котором укреплен стабилизированный двигатель постоянного тока 2, соединенный через редуктор 3 с задающим колесом t вариатора, причем колесо k выполнено в виде шестерни и закреплено на валу 5 подвижную раму 6, способную вращаться в шарнирах 7 жестко связанных с корпусом 1, в плоскости, нормальной плоскости колеса 4, рабочее полсжение которой фиксируется прижимной рукояткой 8, передачу, состоящую из зубчатой направляющей 9 и ведущего колеса вариатора 10, канавку 11, которая задает требуемый профиль, причем колесо 10 образует поступательную пару с валом 12 вариатора, укрепленным в опорах на подвижной раме б, водило 13 с роликом 14, причем в рабочем положении рамы 6 ролик размещается внутри канавки 11, соприкасаясь с ее внутрен,ней стенкой, а водило 13 образует цилиндрическую пару со стержнем 15, соединяющим противоположные стороны рамы 6, и вращательную пару с трубчатым валом колеса 10, ось которой совпадает с осью вала 12, барабан 16 неподвижно закрепленный на валу 17, вращение которому передается от вЭла 12 через конические шестерни 18 и 19 храповой механизм 20 с подпружиненной собачкой, связанной с валом 17, наматываемую на барабан нить 21, которая одним своим концом прикреплена к барабану 16, а другим - к силовому датчику 22, держатель (сетку) 23 для размещения тела 2, массу которого измеряют, отверстие в корпусе или ушко 25 для принудительного натяга нити при ез наматывании и сма тывании с барабана 16, кронштейн 26 для крепления демпфирующей сетки 27 к корпусу 1, легкий мягкий кабель 28 для передачи электрического сигнала от датчика 22 к электронному блоку обработки и отображения информации 29 Устройство работаетследующим образом. Задающее колесо k, водило 13 и связанное с ним зубчатое колесо 10 в развернутом положении подвижной рамы 6 устанавливаются в исходное положение так, что при обратном повороте рамы 6 и фиксации ее в рабочем положении рукояткой 8, ролик И заходит внутрь канавки 11, в ее начало, коле со 10 сцепляется с направляющей 9 э шестерня 18 - с шестерней 19. На редукторе 3 устанавливается пе редаточное число, пересчитанное в единицах линейного ускорения окружных точек барабана 16, а на электрон ном блоке 29 задается продолжительность измерений, соответствующая это му ускорению. Подлежащее измерению тело 2 понецают в сетку 23 и, отключив храпо:врй механизм 20, отводят в пространство напротив демпфирующей сетки 27 на расстояние, равное длине полностью размотанной нити 21, после чего последовательно включают храповой механизм 20, электронный блок 29 и электродвигатель 2 (предусмотрено дистанционное включение). Вращение вала двигателя 2 через редуктор 3 передается задающему колесу {, которое за короткийпромежуток времени приобретает постоянную угловую скорость. При вращении боко3111 набегает на вая стенка канавки ролик 1k водила 13 и смешает его колесом 10 в радиальном навместе с правлении по закону, установленному спиралевидной формой канг&ки 11. После преобразования вращения от вала 12 к валу 17 окружные точки барабана 16 посредством нити 21 придают объекту 2 заданное программой линейное ускорение. Сила натяжения нити 21 замеряется датчиком 22, сигнал от которого по кабелю 28 поступает в блок 29 и обрабатывается . Работа устройства прекращается следующим образом. Ролик Т доходит до наружного радиуса колеса и покидает канавку. Зацепление колеей 10 с направляющей 9 прекращается. Этому моменту соответствует срабатывание реле времени, встроенного в схему блока 29i которое отключает электродвигатель 2, датчик 22 и включает табло блока 23, отображающее величину измеренной массы. В следующие моменты времени барабан 16 продолжает вращение по инерции, но тормозится наматываемой на него нитью по мере того, как тело 24 теряет скорость и останавливается в результате действия демпфирующей сетки 27. Обратного движения теле 2 не происходит за счет действия храпового механизма, и оно оказывается зафиксированным. Линейное ускорение окружных точек барабана устанавливается равным заданному в течение определенного промежутка времени. Используют два способа регулирорать его длительность. Первый из них основан на инерционных свойствах. Второй, используеьшй на последующих стадиях разгона тела, ос-. нован на том, что начальный криволинейный отрезок канавки рассчитывают таким образом, чтобы при равномерном вращении задающего колеса угловое ускорение ведомого вала нарастало бы по определенному, например синусоидальному закону и плавно переходило по истечении заданного времени в постоянное. На фиг. 2 изображено задающее колесо k с зубьями на боковой цилиндрической поверхности, в плоскости (х, yj которого прорезана спирале- . видная канавка 11 прямоугольного сечения. К внешней стенке канавки при79мыкает расположенная на поверхности зубчатая направляющая 9. Ролик Н ка тится по внутренней стенке канавки, вращаясь-вокруг оси, нормальной к плоскости (х, у). в данном случае равноускоренное вращение ведомого вала обеспечивается в течение времени, за которое задающее колесо проходит часть трека, стягиваемую углом у. На участке трека, стягиваемом углом об, скорость и ускорение тела контролируются инер ционными свойствами измерителя, а на участке, стягиваемом углом 3, возрас тают в соответствии с заданной программой. На фиг. 3 показана платформа 30, на которой размещено тело 2, массу которого определяют-, движущаяся по направляющим в виде струн 31, один конец которых пропускают через ячейки сетки 27 и набрасывают на крюки 32, установленные на корпусе 1 вблизи ушка 25, через которое пропускают нить 21. Другие концы струн жестко связывают с рамкой 33, которая через спиральную пружину 3 соединяется с крюком 35, установленным на элементе жесткости 36 отсека космического корабля. Торможение гтлатформы по-прежнему осуществляет демпфирующая сетка 27. Датчик силы 22 устанавливают на платформе 30. Измеритель массы для условий невесомости рассчитан на диапазон изме ряемых масс 0,2-20 кг тел, обладающих широким спектром деформационных свойств, в том числе, животных. Использование лобового вариатора с программно изменяемым коэффициенто передачи для реализации принципа равноускоренного движения в качестве основы конструкции измерителя позволяет обеспечить точность измерений, удовлетворительную для медикобиологических исследований, широкие возможности для определения массы объектов, характеризуемых различными физи ческим состоянием и соотношением линейных размеров, малые массу и габаритные размеры устройства, его высокую надежность и эргономйчность, чтя делает измеритель пригодным для прИ менения на борту орбитальных станций. Формула изобретения 1. Устройство для измерения мастела в невесомости, содержащее 1 держатель тела, корпус, установленные в корпусе привод вращения, преобразователь вращательного движения в ускоренное поступательное, взаимодействующий с приводом и кинематически связанный с держателем, а также измеритель параметра движения держателя, связанный с регистрирующей аппаратурой, о т л и ч а ю ще ес я тем, что, с целью расширения диапазона измеряемых масс и повышения точности измерений за счет уменьшения влияния деформаций тела на режим работы устройства, в нем преобразователь выполнен в виде вариатора, содержащего задающее колесо, связанное через редуктор с приводом, закрепленный на валу барабан и передаточный механизм, взаимодействующий с колесом и валом, причем держатель тела связан с барабаном посредством гибкого звена, а измеритель параметра движения держателя выполнен в виде датчика силы натяжения этого звена. 2.Устройство по п. 1, о т л и чающееся тем, что на торце задающего колеса выполнена канавка с профилированным контуром, вдоль кромки которой образована зубчатая направляющая, а передаточный механизм содержит водило с роликом, размещенным в канавке, установленный в опорах на раме корпуса ведущий вал : и шестерню, посаженную на вал с возможностью перемещения вдоль него, зафиксированную от проворачивания на валу и взаимодействующую с зубчатой направляющей, причем водило установлено на раме .с возможностью поступательного перемещения параллельно плоскости торца задающего колеса и соединено с шестерней, а на ведущем валу закреплено коническое зубчатое колесо, введенное в зацепление с ответным зубчатым колесом, закрепленным на валу барабана. 3.Устройство по пп. 1 и 2, о тличающееся тем, что, с целью повышения его эксплуатационных качеств за счет обеспечения возможности разобщения задающего колеса, вала барабана и передаточного механизма, а также облегчения переналадки, а нем рама корпуса шарнирно связана с корпусом и снабжена фиксатором ее рабочего положения, а редуктор снабжен переключателем на .нейтральную ступень. . Устройство по п. 1, о т л ичающееся тем, что снабжено демпфирующей сеткой, рамещенной меж ду корпусом и держателем тела, а гибкое звено пропущено сквозь ячейку сетки. 5.Устройство по пп. 1 и , о тличающееся тем, что вал барабана снабжен храповым механизмом, блокирующим его-вращение в сто рону разматывания гибкого звена. 6.Устройство по п. 1, отличающееся тем, что на поверхности барабана выполнена винтовая канавка для укладки гибкого звена, а в корпусе - отверстие, сквозь кот рое пропущено, с обеспечением сопротивления протягиванию, гибкое зв но. 7.Устройство по п. 1, отличающееся тем, что держатель тела снабжен направляющими его поступательного перемещения относительно корпуса. 8.Устройство по пп. 1 и 7, о тличающееся тем, что направляющие выполнены в виде струн.. Источники информации, принятые во внимание при экспертизе 1.Сарычев В.А. и др. Исследование точностй прибора для измерения массы в условиях невесомости. М., Препринт ИПМ АН СССРW 16, 1978. 2.Авторское свидетельство СССР № 518639, кл. G 01 G 19/00, 1976 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Фрикционный вариатор | 1982 |
|
SU1203273A1 |
| УСТРОЙСТВО БЕССТУПЕНЧАТОГО ВАРИАТОРА С ПРИВОДОМ ВЕДУЩЕГО ЗВЕНА ЧЕРЕЗ РЫЧАГИ И ИЗМЕНЯЕМУЮ ТОЧКУ ПРИЛОЖЕНИЯ ВНЕШНИХ СИЛ ВРАЩЕНИЯ | 2013 |
|
RU2578797C2 |
| ВЕЛОМОБИЛЬ | 1991 |
|
RU2011595C1 |
| Устройство для резки | 1972 |
|
SU452497A1 |
| ПРИВОД ЗАТВОРА ОРУДИЯ | 2009 |
|
RU2496074C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| УСТРОЙСТВО ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ ИЗ ПОЛИМЕРНЫХ ПЛЕНОК | 2011 |
|
RU2500592C2 |
| Устройство для спасения людей с высотных объектов | 1989 |
|
SU1754129A1 |
| Вариатор с гибкой связью | 1985 |
|
SU1295099A1 |
| УСОВЕРШЕНСТВОВАНИЯ В ПОЗИЦИОННЫХ СЕРВОСИСТЕМАХ ИЛИ ОТНОСЯЩИЕСЯ К ТАКИМ СИСТЕМАМ | 1995 |
|
RU2149787C1 |
27 / - rv 2 .j /5 j
