2Д-гы ч-К25
да
(Л
с:
со
;О С5 СО
Фиг. 6
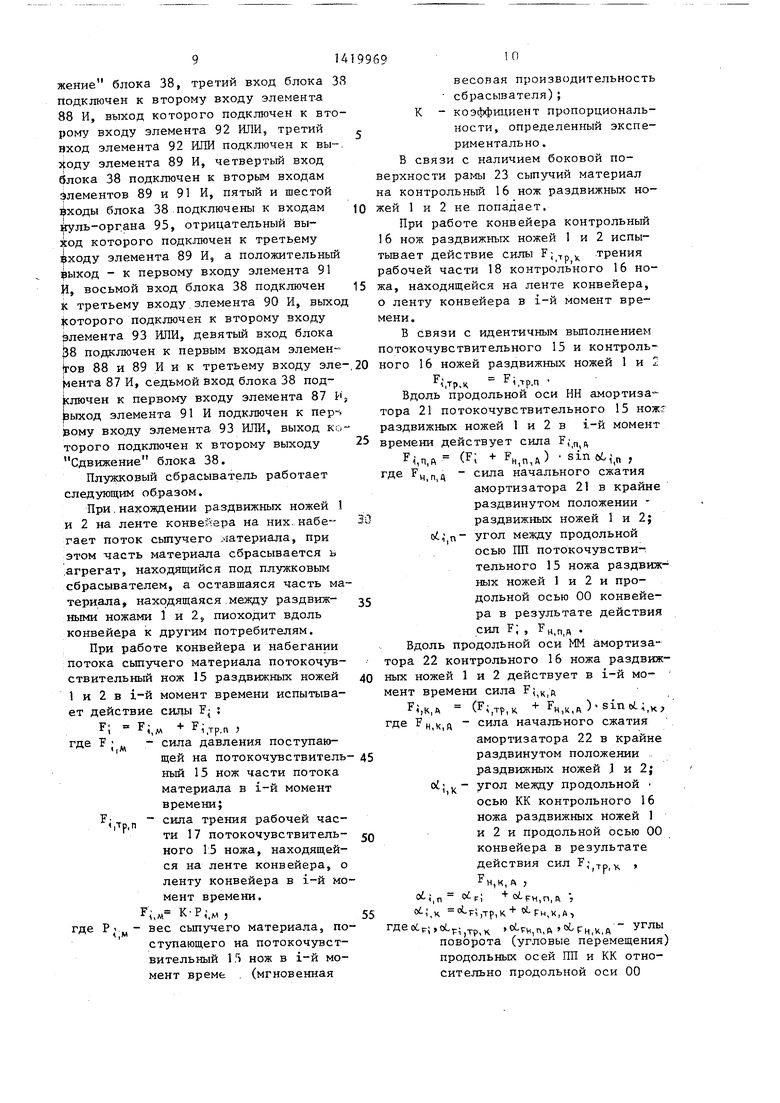
Сьшучий М набегает на симметрично установленные относительно продольной оси К и прикрепленные с помощью осей 19, 20 и амортизаторов 21, 22 к раме раздвижные ножи (Н) 1 и 2, Каждый Н 1 и 2 выполнен из потокочувстви- тельного Н и идентичного ему контрольного Н. Рама снабжена регулировочными упорами и рабочей частью в виде полосы транспортерной ленты на внутренней боковой поверхности. Подъем и раздвижёние Н 1 и 2 осуществляются системой рычагов, Крайние относительно продольной оси К положения Н 1, 2 и опущенное положение подъемной площадки контролируются соответствующими путевыми выключателями 32, 33 и 34. По мере износа рабочих частей Н 1, 2 и рамы площадка опускается на каретку, перемещаемую электромехани-
ческим приводом 8, В схему управления приводом 8 входят измерительные преобразователи 27 и 28 угловых перемещений осей 19, 20 и привода 8 и си- лоизмерительные преобразователи 29 и 30 амортизаторов 21 и 22, сигналы с которых поступают на входы вычислительно-контролирующего блока 35. В нем производится вычисление мгновенной весовой произвести сбрасывателя и проверка сохранения Н 1 и 2 рабочих состояний при полном их раздви- жении. С выхода блока 35 и задатчика 39 сигналы поступают на входы блока 36 вьздачи командно-разрешающих сигналов и блока 37 выдачи позиционно-ко- мандных сигналов, а с выходов блоков 35, 36, 37 и 39 - на входы блока 38 выдачи управляющих сигналов на привод 9. О ил.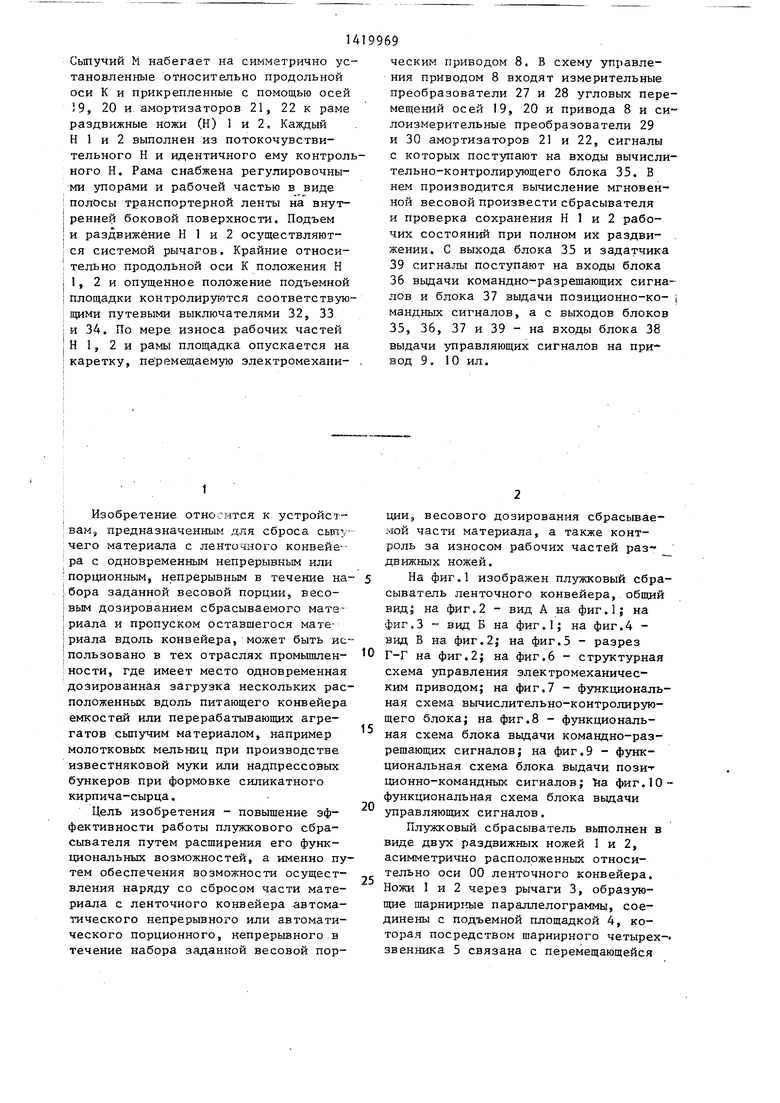


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дозатором кормораздатчика | 1986 |
|
SU1355959A1 |
| Устройство для обмена информацией | 1984 |
|
SU1180905A1 |
| Устройство для контроля работы коксовой батареи | 1986 |
|
SU1353796A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1982 |
|
SU1173190A1 |
| Устройство регулирования процесса прессования изделий на поршневых прессах | 1988 |
|
SU1581580A1 |
| Устройство для программного управления намоточным станком | 1987 |
|
SU1451648A1 |
| Устройство для сопряжения | 1980 |
|
SU903853A1 |
| Устройство контроля распределения гранулометрического состава шихтового материала | 1987 |
|
SU1527274A1 |
| Устройство для счета предметов | 1985 |
|
SU1280412A1 |


Изобретение относится к конвейерному транспорту и позволяет расширить функциональные возможности сбрасывателя путем сброса сьтучего материала (М) с ленточного конвейера (К) с одновременными непрерьшны- ми или порционным, непрерывным в течение набора заданной весовой порции, весовым дозированием сбрасываемого М и пропуском оставшегося М вдоль К.
Изобретение относится к устройствам, предназначенным для сброса сыпучего материала с ленточного конвейера с одновременным непрерывным или порционным, непрерывным в течение набора заданной весовой порции, весовым дозированием сбрасываемого материала и пропуском оставшегося материала вдоль конвейера, может быть использовано в тех отраслях промышленности, где имеет место одновременная дозированная загрузка нескольких расположенных вдоль питающего конвейера емкостей или перерабатывающих агрегатов сыпучим материалом, например молотковых мельниц при производстве известняковой муки или надпрессовьгх бункеров при формовке силикатного кирпича-сырца.
Цель изобретения - повышение эффективности работы плужкового сбрасывателя путем расширения его функциональных возможностей, а именно путем обеспечения возможности осуществления наряду со сбросом части материала с ленточного конвейера автоматического непрерывного или автоматического порционного, непрерьшного в течение набора заданной весовой порции, весового дозирования сбрасьшае- мой части материала, а также контроль за износом рабочих частей раз-- движных ножей.
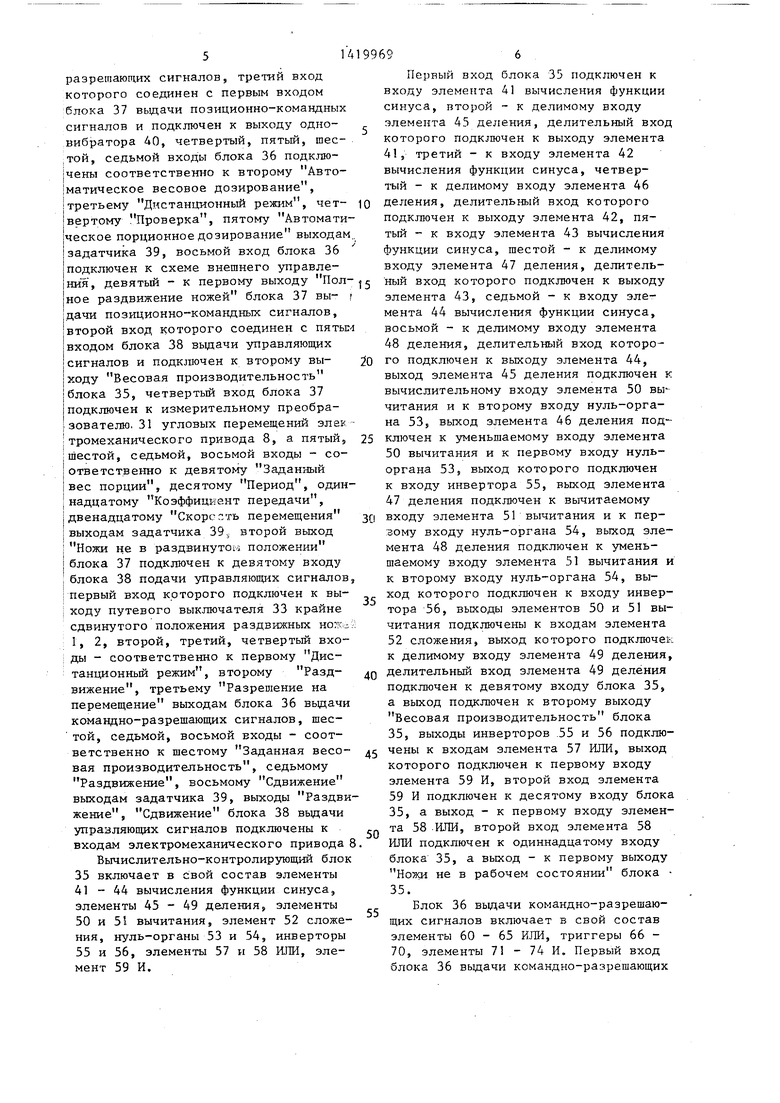
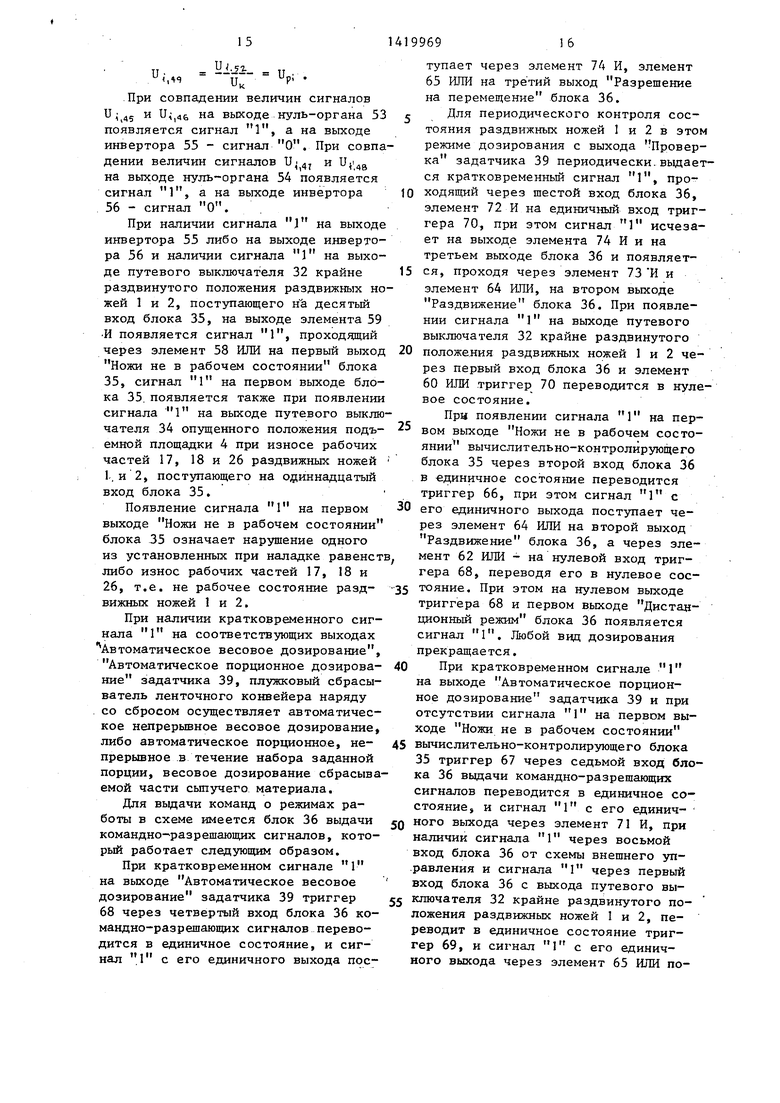
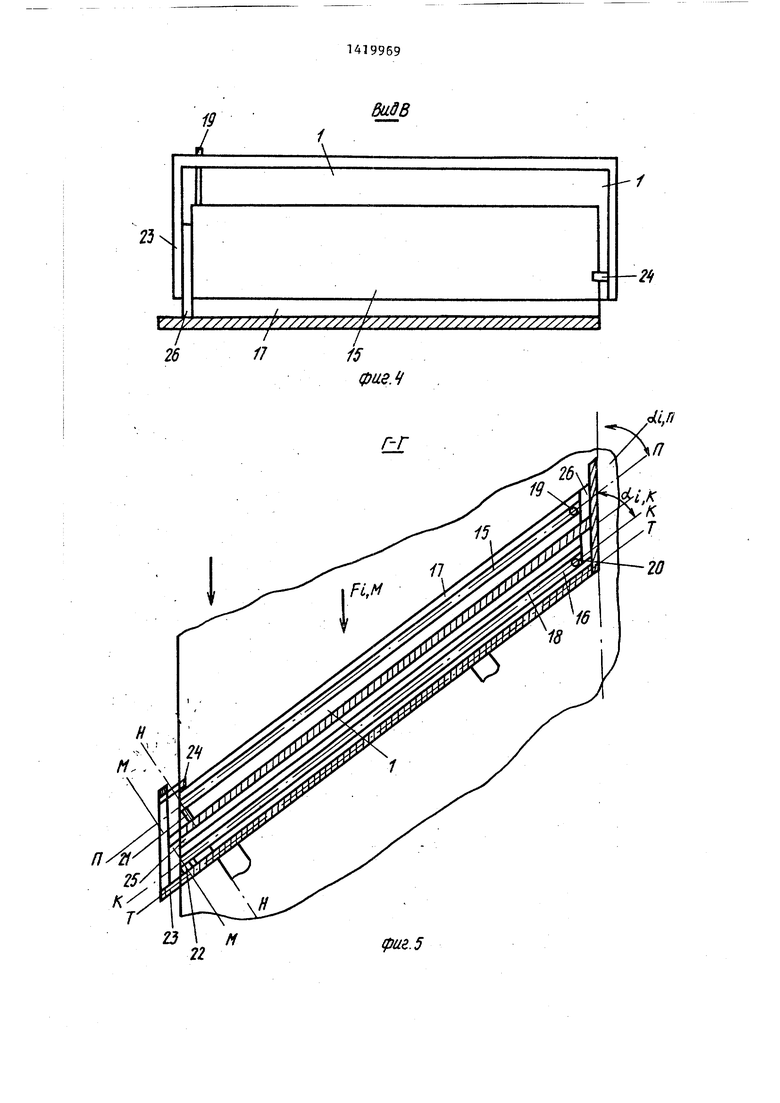
На фиг,1 изображен плужковый сбрасыватель ленточного конвейера, общий ВИД1 на фиг,2 - вид А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.4 - вид В на фиг.2; на фиг.5 - разрез
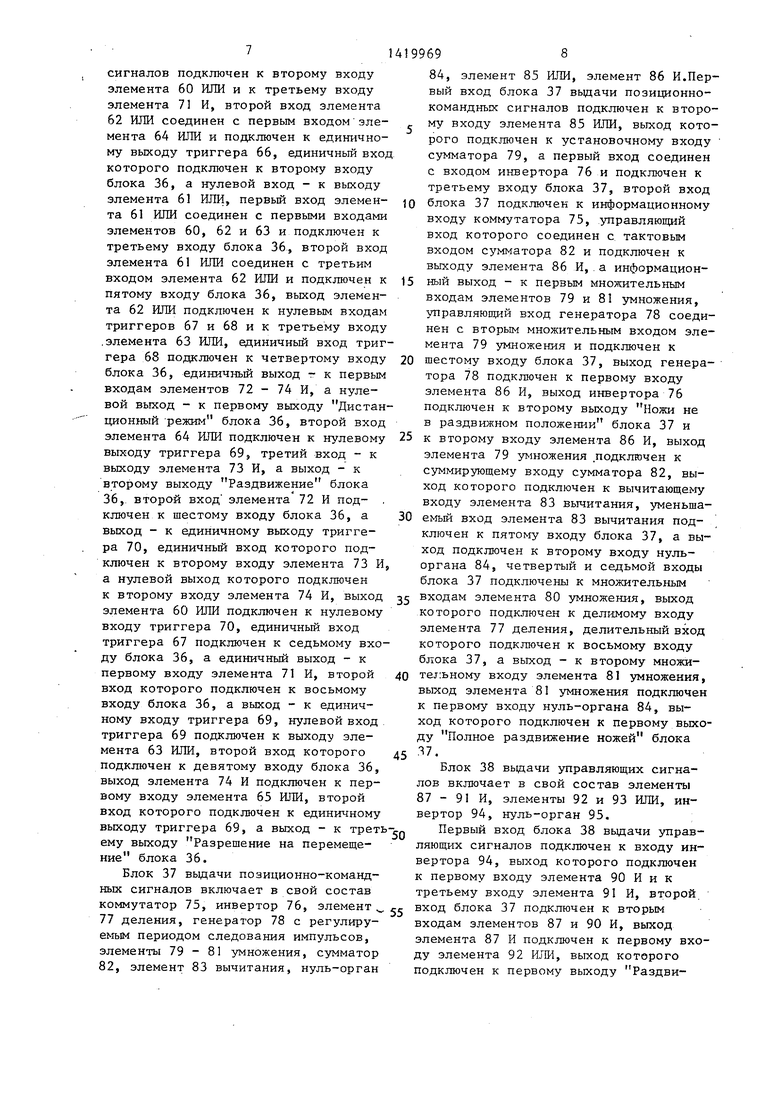
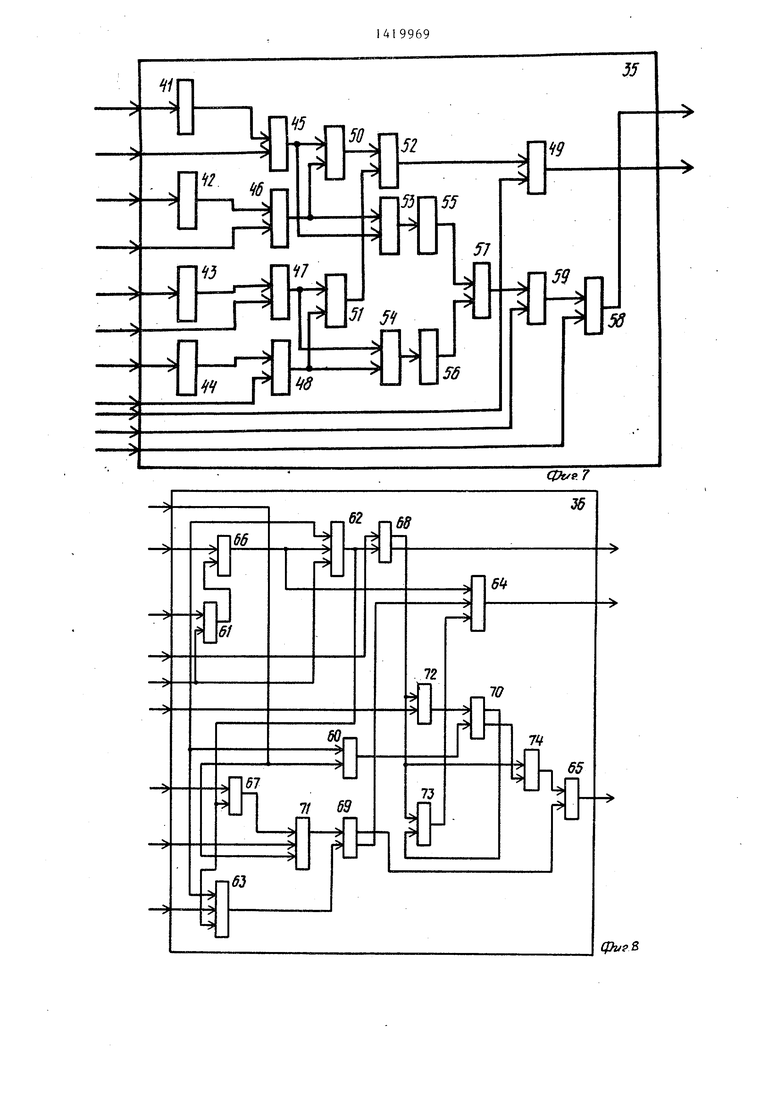
г-Г на фиг,2; на фиг.6 - структурная схема зтравления электромеханическим приводом; на фиг.7 - функциональная схема вычислительно-контролирующего блока; на фиг.8 - функциональная схема блока выдачи командно-разрешающих сигналов; на фиг.9 - функциональная схема блока выдачи пози- ционно-командных сигналов; ia фиг. 10- функциональная схема блока выдачи управляющих сигналов.
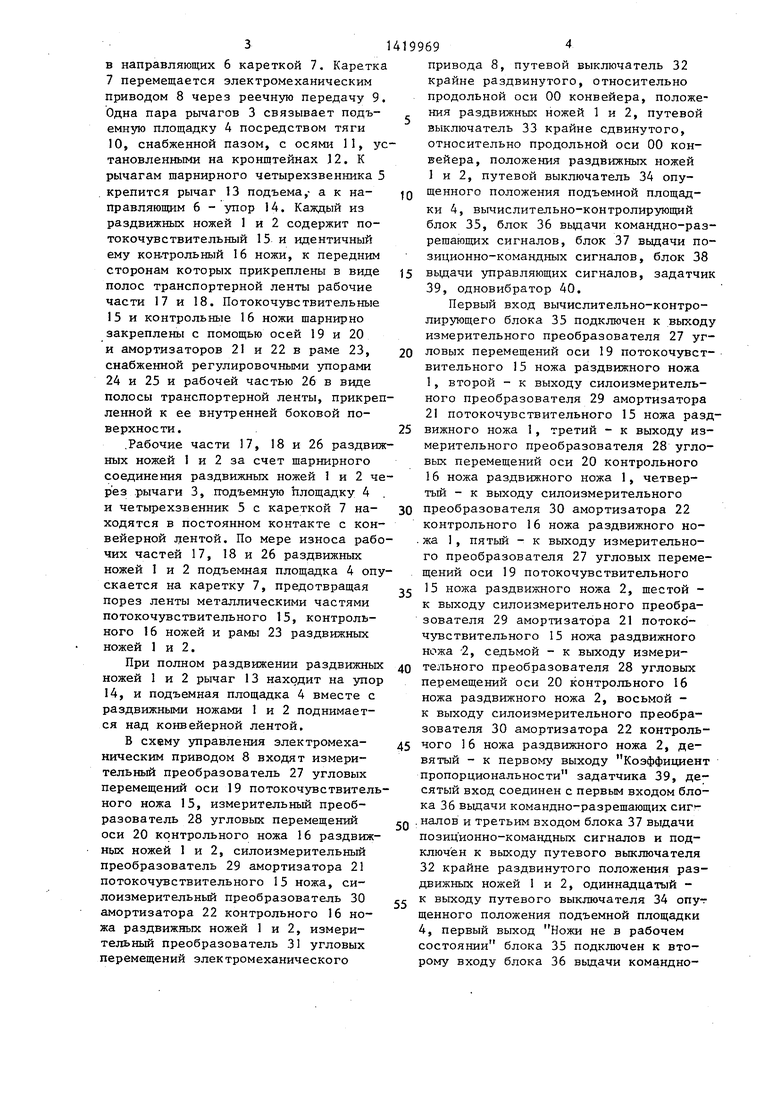
Плужковый сбрасыватель выполнен в виде двух раздвижных ножей 1 и 2, асимметрично расположенных относительно оси 00 ленточного конвейера. Ножи 1 и 2 через рычаги 3, образующие шарнирные параллелограммы, соединены с подъемной площадкой 4, которая посредством шарнирного четырех- звенника 5 связана с перемещающейся
в направляющих 6 кареткой 7. Каретка 7 перемещается электромеханическим приводом 8 через реечную передачу 9. Одна пара рычагов 3 связывает подъ- емкую площадку 4 посредством тяги 10, снабженной пазом, с осями 11, ус тановленньми на кронштейнах 2. К рычагам шарнирного четырехзвенника 5 крепится рычаг 13 подъема,- а к на- правляющим 6 - упор 14. Каждый из раздвижных ножей 1 и 2 содержит по- токочувствительный 15 и идентичный ему контрольный 16 ножи, к передним сторонам которых прикреплены в виде полос транспортерной ленты рабочие части 17 и 18. Потокочз ствительные 15 и контрольные 16 ножи шарнирно закреплены с помощью осей 19 и 20 и амортизаторов 21 и 22 в раме 23, снабженной регулировочными упорами 24 и 25 и рабочей частью 26 в виде полосы транспортерной ленты, прикрепленной к ее внутренней боковой поверхности.
.Рабочие части 17, 18 и 26 раздвижных ножей 1 и 2 за счет шарнирного соединения раздвижных ножей 1 и 2 через рычаги 3, шэдъемную площадку 4
35
40
и четырехзвенник 5 с кареткой 7 на- ЗО преобразователя 30 амортизатора 22 ходятся в постоянном контакте с конвейерной лентой. По мере износа рабочих частей 17, 18 и 26 раздвижных ножей 1 и 2 подъемная площадка 4 опускается на каретку 7, предотвращая порез ленты металлическими частями потокочувствительного 15, контрольного 16 ножей и рамы 23 раздвижных ножей 1 и 2.
При полном раздвижении раздвижных ножей 1 и 2 рычаг 13 находит на упор 14, и подъемная площадка 4 вместе с раздвижными ножами 1 и 2 поднимается над конвейерной лентой.
В схему управления электромеханическим приводом 8 входят измерительный преобразователь 27 угловых перемещений оси 19 потокочувствительного ножа 15, измерительный преобразователь 28 угловых перемещений оси 20 контрольного ножа 16 раздвиж- ньк ножей 1 и 2, силоизмерительный преобразователь 29 амортизатора 21 потокочувствительного 15 ножа, силоизмерительный преобразователь 30 амортизатора 22 контрольного 16 ножа раздвижных ножей 1 и 2, измерительный преобразователь 31 угловых перемещений электромеханического
45
50
55
контрольного 16 ножа раздвижного но .жа 1, пятый - к выходу измерительно го преобразователя 27 угловых перем щений оси 19 потокочувствительного 15 ножа раздвижного ножа 2, шестой к выходу силоизмерительного преобра зователя 29 амортизатора 21 потокочувствительного 15 ножа раздвижного ножа 2, седьмой - к выходу измерительного преобразователя 28 угловых перемещений оси 20 контрольного 16 ножа раздвижного ножа 2, восьмой - к выходу силоизмерительного преобра зователя 30 амортизатора 22 контрол ного 16 ножа раздвижного ножа 2, де вятый - к первому выходу Коэффицие пропорциональности задатчика 39, д сятый вход соединен с первым входом бл ка 36 вьщачи команд но-раз решающих сиг . налов и третьим входом блока 37 выдачи позиц ионно-командных сигналов и под ключён к выходу путевого выключател 32 крайне раздвинутого положения ра движных ножей I и 2, одиннадцатый - к выходу путевого выключателя 34 оп щенного положения подъемной площадк 4, первый выход Ножи не в рабочем состоянии блока 35 подключен к вто рому входу блока 36 вьщачи командно
привода 8, путевой выключатель 32 крайне раздвинутого, относительно продольной оси 00 конвейера, положения раздвижных ножей 1 и 2, путевой выключатель 33 крайне сдвинутого, относительно продольной оси 00 конвейера, положения раздвижных ножей 1 и 2, путевой выключатель 34 опущенного положения подъемной площадки 4, вычислительно-контролирующий блок 35, блок 36 выдачи командно-разрешающих сигналов, блок 37 выдачи по- зиционно-командных сигналов, блок 38 вьщачи управляющих сигналов, задатчик 39, одновибратор 40.
Первый вход вычислительно-контролирующего блока 35 подключен к выходу измерительного преобразователя 27 угловых перемещений оси I9 потокочувст- вительного 15 ножа раздвижного ножа 1, второй - к выходу силоизмеритель- ного преобразователя 29 амортизатора 21 потокочувствительного 15 ножа раздвижного ножа 1, третий - к выходу измерительного преобразователя 28 угловых перемещений оси 20 контрольного 16 ножа раздвижного ножа 1, четвертый - к выходу силоизмерительного
5
0
О преобразователя 30 амортизатора 22
5
0
5
контрольного 16 ножа раздвижного но- .жа 1, пятый - к выходу измерительного преобразователя 27 угловых перемещений оси 19 потокочувствительного 15 ножа раздвижного ножа 2, шестой - к выходу силоизмерительного преобразователя 29 амортизатора 21 потокочувствительного 15 ножа раздвижного ножа 2, седьмой - к выходу измерительного преобразователя 28 угловых перемещений оси 20 контрольного 16 ножа раздвижного ножа 2, восьмой - к выходу силоизмерительного преобразователя 30 амортизатора 22 контрольного 16 ножа раздвижного ножа 2, девятый - к первому выходу Коэффициент пропорциональности задатчика 39, десятый вход соединен с первым входом блока 36 вьщачи команд но-раз решающих сигг . налов и третьим входом блока 37 выдачи позиц ионно-командных сигналов и подключён к выходу путевого выключателя 32 крайне раздвинутого положения раздвижных ножей I и 2, одиннадцатый - к выходу путевого выключателя 34 опу-г щенного положения подъемной площадки 4, первый выход Ножи не в рабочем состоянии блока 35 подключен к второму входу блока 36 вьщачи командноразрешающих сигналов, третий вход которого соединен с первым входом блока 37 выдачи позиционно-командных сигналов и подключен к выходу одно- вибратора 40, четвертый, пятый, шес- ,той, седьмой входы блока 36 подключены соответственно к второму Авто- |матическое весовое дозирование, I третьему Дистанционный режим, чет- |вертому Проверка, пятому Автомати- |ческое порционное дозирование выходам,. I задатчика 39, восьмой вход блока 36 подключен к схеме внешнего з равлеПервый вход блока 35 подключен к входу элемента 41 вычисления функции синуса, второй - к делимому входу элемента 45 деления, делительный вход которого подключен к выходу элемента 4, третий - к входу элемента 42 вычисления функции синуса, четвертый - к делимому входу элемента 46 10 деления, делительный вход которого подключен к выходу элемента 42, пятый - к входу элемента 43 вычисления функции синуса, шестой - к делимому входу элемента 47 деления, делительния, девятый - к первому выходу ный вход которого подключен к выходу
нее раздвижение ножей блока 37 вы- i |дачи позиционно-командных сигналов, второй вход которого соединен с пяться {входом блока 38 выдачи управляющих I сигналов и подкгаочен к второму выходу Весовая производительность блока 35, четвертый вход блока 37 I подключен к измерительному преобразователю, 31 угловых перемещений электромеханического привода 8, а пятый, шестой, седьмой, восьмой входы - соответственно к девятому Заданный вес порции, десятому Период, одиннадцатому Коэффициент передачи, двенадцатому Скорость перемещения выходам задатчика 39 второй выход Ножи не в раздвинутом положении блока 37 подключен к девятому входу блока 38 подачи управляющих сигналов, первый вход которого подключен к вы- : ходу путевого выключателя 33 крайне сдвинутого положения раздвижных нож;.;;: 1, 2, второй, третий, четвертый вхо- : ды - соответственно к первому Дис- танционньм режим, второму Раздвижение, третьему Разрешение на перемещение выходам блока 36 вьщачи командно-разрешающих сигналов, шестой, седьмой, восьмой входы - соответственно к шестому Заданная весовая производительность, седьмому Раздвижение, восьмому Сдвижение выходам задатчика 39, выходы Раздвижение , Сдвижение блока 38 выдачи управляющих сигналов подключены к входам электромеханического привода 8.
Вычислительно-контролирующий блок 35 включает в свой состав элементы 41-44 вычисления функции синуса, элементы 45 - 49 деления, элементы 50 и 51 вычитания, элемент 52 сложения, нуль-органы 53 и 54, инверторы 55 и 56, элементы 57 и 58 ИЛИ, элемент 59 И.
20
25
30
элемента 43, седьмой - к входу элемента 44 вычисления функции синуса, восьмой - к делимому входу элемента 48 деления, делительный вход которого подключен к выходу элемента 44, выход элемента 45 деления подключен к вычислительному входу элемента 50 вы читания и к второму входу нуль-органа 53, выход элемента 46 деления подключен к уменьшаемому входу элемента 50 вычитания и к первому входу нуль- органа 53, выход которого подключен к входу инвертора 55, выход элемента 47 деления подключен к вычитаемому входу элемента 51 вычитания и к первому входу нуль-органа 54, выход элемента 48 деления подключен к уменьшаемому входу элемента 51 вычитания и к второму входу нуль-органа 54, выход которого подключен к входу инвертора 56, выходы элементов 50 и 51 вычитания подключены к входам элемента 52 сложения, выход которого подключен к делимому входу элемента 49 деления, делительный вход элемента 49 деления подключен к девятому входу блока 35, а выход подключен к второму выходу Весовая производительность блока 35, выходы инверторов .55 и 56 подклю- д5 чены к входам элемента 57 ИЛИ, выход которого подключен к первому входу элемента 59 И, второй вход элемента 59 И подключен к десятому входу блока 35, а выход - к первому входу элемента 58 .ИЛИ, второй вход элемента 58 ИЛИ подключен к одиннадцатому входу блока 35, а выход - к первому выходу Ножи не в рабочем состоянии блока 35.
Блок 36 выдачи командно-разрешающих сигналов включает в свой состав элементы 60 - 65 ИЛИ, триггеры 66 - 70, элементы 71 - 74 И. Первый вход блока 36 вьщачи командно-разрешающих
35
40
50
55
696
Первый вход блока 35 подключен к входу элемента 41 вычисления функции синуса, второй - к делимому входу элемента 45 деления, делительный вход которого подключен к выходу элемента 4, третий - к входу элемента 42 вычисления функции синуса, четвертый - к делимому входу элемента 46 деления, делительный вход которого подключен к выходу элемента 42, пятый - к входу элемента 43 вычисления функции синуса, шестой - к делимому входу элемента 47 деления, делительный вход которого подключен к выходу
5
0
элемента 43, седьмой - к входу элемента 44 вычисления функции синуса, восьмой - к делимому входу элемента 48 деления, делительный вход которого подключен к выходу элемента 44, выход элемента 45 деления подключен к вычислительному входу элемента 50 вы читания и к второму входу нуль-органа 53, выход элемента 46 деления подключен к уменьшаемому входу элемента 50 вычитания и к первому входу нуль- органа 53, выход которого подключен к входу инвертора 55, выход элемента 47 деления подключен к вычитаемому входу элемента 51 вычитания и к первому входу нуль-органа 54, выход элемента 48 деления подключен к уменьшаемому входу элемента 51 вычитания и к второму входу нуль-органа 54, выход которого подключен к входу инвертора 56, выходы элементов 50 и 51 вычитания подключены к входам элемента 52 сложения, выход которого подключен, к делимому входу элемента 49 деления, делительный вход элемента 49 деления подключен к девятому входу блока 35, а выход подключен к второму выходу Весовая производительность блока 35, выходы инверторов .55 и 56 подклю- 5 чены к входам элемента 57 ИЛИ, выход которого подключен к первому входу элемента 59 И, второй вход элемента 59 И подключен к десятому входу блока 35, а выход - к первому входу элемента 58 .ИЛИ, второй вход элемента 58 ИЛИ подключен к одиннадцатому входу блока 35, а выход - к первому выходу Ножи не в рабочем состоянии блока 35.
Блок 36 выдачи командно-разрешающих сигналов включает в свой состав элементы 60 - 65 ИЛИ, триггеры 66 - 70, элементы 71 - 74 И. Первый вход блока 36 вьщачи командно-разрешающих
5
0
0
5
сигналов подключен к второму входу элемента 60 ИЛИ и к третьему входу элемента 71 И, второй вход элемента 62 ИЛИ соединен с первым входом элемента 64 ИЛИ и подключен к единичному выходу триггера 66, единичньш вход которого подключен к второму входу блока 36, а нулевой вход - к выходу элемента 61 ИЛИ, первьй вход элемента 61 ИЛИ соединен с первыми входами элементов 60, 62 и 63 и подключен к третьему входу блока 36, второй вход элемента 61 ИЛИ соединен с третьим входом элемента 62 ИЛИ и подключен к пятому входу блока 36, выход элемента 62 ИЛИ подключен к нулевым входам триггеров 67 и 68 и к третьему входу .элемента 63 ИЛИ, единичный вход триггера 68 подключен к четвертому входу блока 36, единичньш выход - к первым входам элементов 72 - 74 И, а нулевой выход - к первому выходу Дистанционный режим блока 36, второй вход элемента 64 ИЛИ подключен к нулевому выходу триггера 69, третий вход - к выходу элемента 73 И, а выход - к второму выходу Раздвижение блока 36, второй вход элемента 72 И под- , ключен к шестому входу блока 36, а выход - к единичному выходу триггера 70, единичный вход которого подключен к второму входу элемента 73 И а нулевой выход которого подключен к второму входу элемента 74 И, выход элемента 60 ИЛИ подключен к нулевому входу триггера 70, единичный вход триггера 67 подключен к седьмому входу блока 36, а единичный выход - к первому входу элемента 71 И, второй вход которого подключен к восьмому входу блока 36, а выход - к единичному входу триггера 69, нулевой вход триггера 69 подключен к выходу элемента 63 РШИ, второй вход которого подключен к девятому входу блока 36, выход элемента 74 И подключен к первому входу элемента 65 ИЛИ, второй вход которого подключен к единичному выходу триггера 69, а выход - к треть
ему выходу Разрешение на перемещение блока 36.
Блок 37 вьщачи позиционно-команд- ных сигналов включает в свой состав коммутатор 75, инвертор 76, элемент 77 деления, генератор 78 с регулируемым периодом следования импульсов, элементы 79-81 умножения, сумматор 82, элемент 83 вычитания, нуль-орган
2530 35 4045 -.
4199698
84, элемент 85 ИЛИ, элемент 86 И.Первый вход блока 37 вьщачи поэиционно- командных сигналов подключен к второ- му входу элемента 85 ИЛИ, выход которого подключен к установочному входу сумматора 79, а первый вход соединен с входом инвертора 76 и подключен к третьему входу блока 37, второй вход
10 блока 37 подключен к информационному входу коммутатора 75, управляющий вход которого соединен с тактовым входом сумматора 82 и подключен к выходу элемента 86 И,.а информацион15 ный выход - к первым множительным входам элементов 79 и 81 занижения, зшравляющий вход генератора 78 соединен с вторым множительным входом элемента 79 умножения и подключен к
20 шестому входу блока 37, выход генератора 78 подключен к первому входу элемента 86 И, выход инвертора 76 подключен к второму выходу Ножи не
25 30 35 0 5
0
5
к второму входу элемента 86 И, выход элемента 79 уъшожения .подключен к суммирующему входу сумматора 82, выход которого подключен к вычитающему входу элемента 83 вычитания, уменьша- емьм вход элемента 83 вычитания подключен к пятому входу блока 37, а выход подключен к второму входу нуль- органа 84, четвертый и седьмой входы блока 37 подключены к множительным входам элемента 80 умножения, выход которого подключен к делимому входу элемента 77 деления, делительный вход которого подключен к восьмому входу блока 37, а выход - к второму множи- TejibHOMy входу элемента 81 умножения, выход элемента 81 умножения подключен к первому входу нуль-органа 84, выход которого подключен к первому выходу Полное раздвижение ножей блока 37.
Блок 38 выдачи управляющих сигналов включает в свой состав элементы 87-91 И, элементы 92 и 93 ИЛИ, инвертор 94, нуль-орган 95.
Первый вход блока 38 выдачи управляющих сигналов подключен к входу инвертора 94, выход которого подключен к первому входу элемента 90 И и к третьему входу элемента 91 И, второй вход блока 37 подключен к вторым входам элементов 87 и 90 И, выход элемента 87 И подключен к первому входу элемента 92 ИЛИ, выход которого подключен к первому выходу Раздви9
блока 38, третий вход блока 3
жение
подключен к второму входу элемента 88 И, выход которого подключен к второму входу элемента 92 ИЛИ, третий вход элемента 92 ИЛИ подключен к вы ходу элемента 89 И, четвертый вход блока 38 подключен к вторым входам Элементов 89 и 91 И, пятый и шестой йходы блока 38 подключены к входам йуль-органа 95, отрицательный выход которого подключен к третьему 9ХОДУ элемента 89 И, а положительный рыход - к первому входу элемента 91 И, восьмой вход блока 38 подключен К третьему входу.элемента 90 И, выхо ijcoTOporo подключен к второму входу Элемента 93 ИЛИ, девятый вход блока $8 подключен к первым входам элемен
jroB 88 и 89 И и к третьему входу эле-, 20 ного 16 ножей раздвижных ножей 1 и
87 И, седьмой вход блока 38 под- Цлючен к первому входу элемента 87 И ыход элемента 91 И подключен к пер- Ьому входу элемента 93 ИЛИ, выход которого подключен к второму выходу Сдвижение блока 38,
Плужковый сбрасыватель работает следующим образом.
При.нахождении раздвижных ножей 1 и 2 на ленте конвейера на них,.набегает поток сьшучего материала, при этом часть материала сбрасывается в .агрегат, находящийся под плужковым сбрасывателем, а оставшаяся часть материала, находящаяся между раздвижными ножами 1 и 2j пиоходит вдоль конвейера к другим потребителям.
При работе конвейера и набегании потока сьшучего материала потокочув- ствительный нож 15 раздвижных ножей 1 и 2 в х-й момент времени испытывает действие силы F ;
FI г 1 + Р
«,М I.Tp.n J
- сила давления поступающей на потокочзгвствитель ный 15 нож части потока материала в i-й момент времени;
сила трения рабочей части 17 потокочувствительного 15 ножа, находящейся на ленте конвейера, о ленту конвейера в i-й момент времени.
F,M К Р,м 5
где Р V| - вес сьтучего материала, поступающего на потокочувст- вительный 1 нож в i-й момент времь . (мгновенная
где F
IrM
(|Tp,n
О
весовая производительность сбрасывателя);
К - коэффициент пропорциональности, определенный экспериментально.
В связи с наличием боковой поверхности раг-1ы 23 сыпучий материал на контрольньш 16 нож раздвижных ножей 1 и 2 не попадает.
При работе конвейера контрольный 16 нож раздвижных ножей 1 и 2 испытьшает действие силы F;
тр,к
трения
рабочей части 18 контрольного 16 но- жа, находящейся на ленте конвейера, о ленту конвейера в i-й момент времени,
В связи с идентичным вьтолнением потокочувствительного 15 и контроль5
5
1,тр,к .п
Вдоль продольной оси НН амортизатора 21 потокочувствительного 15 нож; раздвижных ножей 1 и 2 в 1-й момент 5 времени действует сила F;,n,ft
.Р,
где F
(F; -ь
РН,П,,А) sinoi.i,n ,
н,п,А
0
сила начального сжатия амортизатора 21 в крайне раздвинутом положении - раздвижных ножей 1 и 2; 6i;,r угол между продольной осью пи потокочувствительного 15 ножа раздвижных ножей 1 и 2 и продольной осью 00 конвейера в результате действия сил F; , ,
Вдоль продольной оси мм амортизатора 22 контрольного 16 ножа раздвижных ножей 1 и 2 действует в i-й момент времени сила
,K,ft
(F;.
+ F.
)
0
STP|1 HiKift где F,ц( - сила начального сжатия
амортизатора 22 в крайне раздвинутом положении раздвижных ножей J и 2; oi; - угол между продольной осью КК контрольного 16 ножа раздвижных ножей 1 и 2 и продольной осью 00 конвейера в результате действия сил F;,- ,
Н,К, А ;
od.,-,n oi,i +oi.
FH,n,ft ,
,4 ,тр,к+ « FH,K,A, ,Ы. ,п,й.,К,А
поворота (угловые перемещения) продольных осей ПП и КК относительно продольной оси 00
конвейера от действия соответствующих сил.
Величины сил , измеряются и преобразуются в пропорцио- нальные сигналы , , U«,3o,i U; ,0 2. Ui ъол соответственно силоиз- мерительньтми преобразователями 29 и 30 амортизаторов 21 и 22 раздвижных ножей 1 и 2.
Величины углов (угловых перемещений) oi:,,r измеряются и преобразуются в пропорциональные сигналы
l, if,1 ,28,t 2.1,1 i|28,2 °
ответственно измерительными преобра- зователями 27 и 28 угловых перемещений осей 19 и 20 раздвижных ножей 1 и 2.
При наладке плужкового сбрасывателя перед началом работы добиваются выполнения равенств
1,29,1 .ОИ 5,29,1. Ui,bo.2 5 Ui,77,1. U . Ze, U,,7,a. Ui,ie,2
в крайне раздвинутом положении раздвижных ножей 1 и 2 при поднятой подъ- емйой площадке 4 с помощью регулирующих упоров 24 и 25 и регулировки измрительных и силризмерительных преобразователей 27 - 30 раздвижных ножей 1 и 2.
По сигналам U,.j , , i i.oj (7т,i и,,78 2 , и,. и,,0,1 с выходов измерительных и силоиз мерительных преобразователей 27 - 30 раздвижных ножей . 1 и 2 и сигналу и,, пропорциональному коэффициенту К, с первого .выхода Коэффициент пропорциональности в вычислительно-контролирующем блоке 35 вычисляется сигнал Up; , пропорциональ- ный мгновенной весовой производительности сбрасьюателя, который с второго выхода Весовая производительность блока 35 поступает на пятый вход блока 38 вьщачи управляющих сигналов и на второй вход блока 37 вьщачи пози- ционно-командных сигналов.
Плужковый сбрасыватель работает в автоматическом режиме непрерывного весового дозирования либо в.автома- тическом режиме порционного, непре- рьшного в течение набора заданной порции, весового дозирования.
При непрерывном весовом дозировании в блоке 38 выдачи управляющих сигналов происходит сравнение сигнала Up, с сигналом Up с выхода Заданная весовая производительность задатчика 39. При Up; Up,, появляет-.
ся сигнал 1 на первом выходе Разд вижение блока 38, поступающий на один вход электромеханического привода 8. При этом электромеханический привод 8, вращаясь, через реечную передачу 9 перемещает в направляющих 6 каретку 7, которая через шарнирный четырехзвенник 5, подъемную площадку 4, рычаги 3, тягу 10, оси 11, кронштейны 12 перемещает раздвижные ножи 1 и 2, с линейной скоростью VA вдоль продольной оси ТТ от продольной оси 00 конвейера в положеьте при котором выполняется равенство Upl Up3 .
При Upi Upjраздвижные ножи 1 и 2 перемещаются к продольной оси 00 конвейера в положение, при котором выполняется равенство Up; UpT,. При достижении раздвижными ножами 1 и 2 крайних, относительно продольной оси 00 конвейера, положений на выходах путевых выключателей 32 и 33 появляются сигналы 1, при этом перемещение раздвижных ножей I и 2 прекращается. Для дистанционного.перемещения раздвижных ножей 1 и 2 с выходов Ди станционный режим работы, Раздви- жение, Сдвижение задатчика 39 подаются сигналы 1, при которых появляются сигналы 1 на соответствующих выходах блока 38 выдачи управляющих сигналов.
При порционном дозировании по сигналу Up; , сигналу U, пропорциональному коэффициенту пропорциональности К между угловым перемещением электромеханического привода 8 и линей- перемещением по продольной оси ТТ раздвижных ножей 1 и 2 от крайне раздвинутого положения, с выхода.Коэффициент передачи задатчика 39, сигналу U(j, пропорциональному линейной скорости Vfl перемещения раздвижных ножей 1 и 2 по продольной оси ТТ от продольной оси 00 конвейера, с выхода Скорость перемещения задатчи- ка 39,и сигналу U,, с выхода измерительного преобразователя 31 угловых перемещений, пропорциональному угловому перемещению электромеханического привода 8 в i-й момент времени от крайнего начального положения, в блоке 36 вьщачи позиционно-команд- ных сигналов вычисляется сигнал U.; g пропорциональный весу материала P-jg} который сбрасывается при данной весовой производительности сбрасьгоателя
за время tj , в течение которого разд Вижные ножи и 2 из положения, в котором они находятся в i-й момент времени, переместятся в крайне раздвину- тое положение и сигнаш U;
пропорциональный весу Р порции, набран- |ному к i-му моменту времени. I При выполнении равенства
и
pin U;, и,
10
|где , ,,- сигнал с выхода Заданный : вес порции задатчика 39, : пропорциональный заданно- ; му весу порции, поступаю- ; щей на четвертый вход бло- 15 ка 38.
I На первом выходе Полное раздвиже- |ние ножей блока 37 появляется сигнал , поступающий на девятый вход блс
Для установления cx eNai в исходное состояние при включении питания од- новибратор 40 выдает кратковременный сигнал 1.
Вычислительно-контролирующий блок 35 работает следующим образом. .
Сигналы и ,27,1 1,18,1 ,-27,2.
. ze.a поступают через соответственно первый, третий, пятый, седьмой входы блока 35 на входы соответствен но элементов 41 - 44, на выходах ко|ка 36 выдачи командно-разрешающих сиг-20 торых появляются сигналы jUi ,4j и, , пропорциональные sin.
соответственно oi-i,n,, ..,, ot;,n.2
I налов, При этом на втором выходе I Раздвижение блока 36 появляется I сигнал 1, поступающей на третий ;вход блока 38, и на выходе Раздви- ;жение блока 38 появляется сигнал 1. Раздвижные ножи 1 и 2 перемес- ;тятся в крайне раздвинутое положение. : При отсутствий сигнала I на вто- ;ром выходе Раздвижение блока 36, :т.е. в течение набора заданной пор- 1щи.) плужковым сбраслшателем ленточ- Iного конвейера производится непрерыв I ное дозирование, так как сигнал Up; постоянно поступает на вход блока .1 j В вычислит.ельно-контролирующем i блоке 35 производится при полном I раздвижении раздвижных ножей 1 и 2 проверка сохранения ими рабочих сост: яний, а также контролируется отсутствие сигнала 1 на выходе путевого выключателя 34 опущенного положения подъёмной площадки. При наличии отклонений от равенств, установленных при наладке и опущенном положении подъемной площадки 4, на первом выходе Ножи не в рабочем состоянии блока 35 появляется сигнал 1, поступающий на второй вход блока 36, при этом появляется на втором выходе Раздвижение блока 36 сигнал , схема управления переводится автоматически в дистанционном режиме работы.
Для автоматической периодической проверки сохранения рабочих состояний раздвижных ножей 1 и 2 в автоматическом режиме непрерывного весового дозирования, с выхода npoBepKav задатчика 39 период. ски постзшает
oi
чк.г
поступающие на делительные
входы соответственно элементов 45 - - 48 деления, на делимые входы которьпс поступают соответственно сигналы
и
.iq,
.ьо,1 ,q,.2. S Ui. 1о,г
30
рез соответственно второй, четвертый шестой, восьмой входы блока 35, а на
выходах лы
элементов появляются сигна35
Ui. Ui,
1-5
U4|79,J
иТлГ
Uiiiq.T.
l,46
и 1,10,1
uT7z
4- и;,4г
и,,-, , UM Сигнал поступает на уменьша емьй вход элемента 50 вычитания, ни вычитаемьй вход которого поступает сигнал и, , при этом на его выходе
40 появляется сигнал , i ,46 поступающий на один вход элемента 52 сложения. Сигнал поступает на уменьщаемый вход элемента 51 вычитания, на вычитаемый вход которого пос
45 тупает сигнал U ivg при этом на его выходе появляется сигнал U,5i - и,,48 поступающий на втог рой вход элемента 52 сложения, на выходе которого появляется сигнал
50 ч ,- + Ui,5i поступающий на делимый вход элемента 49 деления. На делительный вход элемента 49 деления поступает постоянно сигнал U че« рез девятьш вход блока 35 с первого
55 входа Коэффициент пропорциональности задатчика 39, и на выходе элемента 49 деления и втором выходе Весовая производительность блока 35 появляется сигнал
сигнал 1 на шестой вход блока 36, при этом на его втором выходе Разд- вижение появляется периодически сигнал 1, автоматическое непрерывное дозирование прекращается и возобновляется при сохранении раздвижными ножами 1 и 2 рабочих состояний.
Для установления cx eNai в исходное состояние при включении питания од- новибратор 40 выдает кратковременный сигнал 1.
Вычислительно-контролирующий блок 35 работает следующим образом. .
Сигналы и ,27,1 1,18,1 ,-27,2.
. ze.a поступают через соответственно первый, третий, пятый, седьмой входы блока 35 на входы соответствен но элементов 41 - 44, на выходах коoi
чк.г
поступающие на делительные
входы соответственно элементов 45 - 48 деления, на делимые входы которьпс поступают соответственно сигналы
и
.iq,
.ьо,1 ,q,.2. S Ui. 1о,г
рез соответственно второй, четвертый, шестой, восьмой входы блока 35, а на
выходах лы
элементов появляются сигна5
Ui. Ui,
1-5
U4|79,J
иТлГ
Uiiiq.T.
l,46
и 1,10,1
uT7z
4- и;,4г
и,,-, ,
Сигнал поступает на уменьша- емьй вход элемента 50 вычитания, ни вычитаемьй вход которого поступает сигнал и, , при этом на его выходе
появляется сигнал , i ,46j поступающий на один вход элемента 52 , сложения. Сигнал поступает на уменьщаемый вход элемента 51 вычитания, на вычитаемый вход которого поступает сигнал U ivg при этом на его выходе появляется сигнал U,5i - и,,48 поступающий на втог рой вход элемента 52 сложения, на выходе которого появляется сигнал
ч ,- + Ui,5i поступающий на делимый вход элемента 49 деления. На делительный вход элемента 49 деления поступает постоянно сигнал U че«- рез девятьш вход блока 35 с первого
входа Коэффициент пропорциональности задатчика 39, и на выходе элемента 49 деления и втором выходе Весовая производительность блока 35 появляется сигнал
15
.ч U При совпадении величин
и
и„
И ,б на выходе нуль-органа 53 появляется сигнал 1, а на выходе инвертора 55 - сигнал О. При совпадении величин сигналов tUs на выходе нуль-органа 54 появляется сигнал 1, а на выходе инвертора 56 - сигнап О. .
При наличии сигнала J на выходе инвертора 55 либо на выходе инвертора 56 и наличии сигнала 1 на выходе путевого выключателя 32 крайне раздвинутого положения раздвижных ножей 1 и 2, поступающего десятый вход блока 35, на выходе элемента 59 И появляется сигнал 1, проходящий через элемент 58 ИЛИ на первый выход Ножи не в рабочем состоянии блока 35, сигнал 1 на первом выходе бло30
ка 35. появляется также при появлении сигнала 1 на выходе путевого выключателя 34 опущенного положения подъ- емной площадки 4 при износе рабочих частей 17, 18 и 26 раздвижных ножей 1-, и 2, поступающего на одиннадцатый вход блока 35,
Появление сигнала 1 на первом выходе Ножи не в рабочем состоянии блока 35 означает нарушение одного из установленных при наладке равенств, либо износ рабочих частей 17, 18 и 26, т.е. не рабочее состояние раздвижных ножей 1 и 2,
При наличии кратковременного сигнала I на соответствующих выходах Автоматическое весовое дозирование, Автоматическое порционное дозирова- 40 ние задатчика 39, плужковый сбрасыватель ленточного конвейера наряду со сбросом осуществляет автоматическое непрерывное весовое дозирование, либо автоматическое порционное, непрерывное в течение набора заданной порции, весовое дозирование сбрасываемой части сьшучего материала.
Для вьщачи команд о режимах работы в схеме имеется блок 36 выдачи командно-разрешающих сигналов, который работает следующим образом.
При кратковременном сигнале 1 на выходе Автоматическое весовое дозирование задатчика 39 триггер 68 через четвертый вход блока 36 командно-разрешающих сигналов переводится в единичное состояние, и сигнал 1 с его единичного выхода пос20
35
45
50
55
1419969
16
0
0
тупает через элемент 74 И, элемент 65 ИЛИ на третий выход Разрешение на перемещение блока 36.
Для периодического контроля состояния раздвижных ножей 1 и 2 в этом режиме дозирования с выхода Проверка задатчика 39 периодически.выдается кратковременньй сигнал 1, про10 ходящий через шестой вход блока 36, элемент 72 И на единичный вход триггера 70, при этом сигнап 1 исчезает на выходе элемента 74 И и на третьем выходе блока 36 и появляет15 ся, проходя через элемент 73 И и элемент 64 ИЛИ, на втором выходе Раздвижение блока 36. При появлении сигнала 1 на выходе путевого выключателя 32 крайне раздвинутого
20 положения раздвижных ножей 1 и 2 через первый вход блока 36 и элемент 60 ИЛИ триггер 70 переводится в нулевое состояние.
При появлении сигнала 1 на первом выходе Ножи не в рабочем состоянии вычислительно-контролирующего блока 35 через второй вход блока 36 в единичное состояние переводится триггер 66, при этом сигнал 1 с его единичного выхода поступает через элемент 64 ИЛИ на второй выход Раздвижение блока 36, а через элемент 62 ИЛИ - на нулевой вход триггера 68, переводя его в нулевое сос- 5 тояние. При этом на нулевом выходе триггера 68 и первом выходе Дистан- ционньш режим блока 36 появляется
40
сигнал 1 . ТЬобой вид дозирования прекращается.
При кратковременном сигнале 1 на выходе Автоматическое порционное дозирование задатчика 39 и при
отсутствии сигнала 1 на первом выходе Ножи не в рабочем состоянии 45 вычислительно-контролирующего блока 35 триггер 67 через седьмой вход блока 36 выдачи командно-разрешающих сигналов переводится в единичное состояние, и сигнал 1 с его единич- ного выхода через элемент 71 И, при
50
наличии сигнала 1 через восьмой
вход блока 36 от схемы внешнего уп- .равления и сигнала 1 через первый вход блока 36 с выхода путевого вы- 55 ключателя 32 крайне раздвинутого положения раздвижных ножей 1 и 2, переводит в единичное состояние триггер 69, и сигнал I с его единичного выхода через элемент 65 ИЛИ поступает на третий выход Разрешение на перемещение блока 36.- При этом начинается автоматическое порционное, непрерывное в течение набора заданной порции, весовое дозирование.
При поступлении сигнала 1 с первого выхода Полное раздвижение ножей блока 37 вьщачи позиционно-ко- Цандных сигналов через девятый вход Ьлока 36 выдачи.командно-разрешающих Ьигналов и элемент 63 ИЛИ триггер 69 Переводится в нулевое состояние, при том сигнал 1 исчезает на третьем
нератора 78, при наличии сигналов 1 с выхода инвертора 76, подаются на тактовый вход сумматора 82 и на управ ляющий вход коммутатора 75, при этом сигнал с второго выхода Весовая производительность вычислительно-контролирующего блока 35 Up; через второй вход блока 37 выдачи позиционно-ко
10 маидных сигналов и информационные вход и выход коммутатора 75 с периодом следования о поступает на первые множительные входы элементов 79 и 81 умножения. На выходе элемента
15 79 умножения в i-й момент времени
появляется сигнал с периодом следования
TU;,
19
Up
, поступающий
на суммирующий вход сумматора 82, на выходе которого в i-й момент вреЬыходе Разрешение на перемещение
появляется на втором выходе Разд-
ижение блока 36 вьщачи командно-ра|3решающих сигналов, Автоматический
|набор следующей порции начинается при
отсутствии сигналов на первом вы- 20 мени появляется сигнал
Ьсоде Раздвижение блока 37 выдачи по зиционно-командных сигналов и на пер|вом выходе Ножи не в рабочем состоя«ии вычислительно-контролирующегооои
lull 25 ° вычитания. На уменьшаемьй вход элемента 83 вычитания через пятый вход блока 37 с выхода Заданный вес порции поступает сигнал Upin выходе элемента 83 вычитания появляется сигнал U, g, ирэп Ui.e-z
II
Р
Ut U;,
и
поступающий на вычитаемый вход элеблока 35 и при наличии сигналов со схемы внешнего управления и с выхода путевого выключателя 32 крайне раздвинутого положения раздвижных ножей 1 и 2.
При наличии сигнала 1 на выходе 30
, поступающий на второй вход
элемента 62 ИЛИ триггеры 67 и 69 переводятся в нулевое состояние и автоматическое порционное, непрерьшное в течение набора заданной порции, , поступающий на второй вход
нуль-органа 84.
Сигнал и,,,, с выхода измерительного преобразователя 31 угловых перемещений электромеханического при- совое дозирование прекращается. При -лч „ „ а„ „,
i- i -ч - J5 вода 8 через четвертый вход блока 37
nvmn-Ljo-Lxrjrrx тгтлтЛ а ыа «Я Tat.rvrinia пггипт г п-
выдачи позиционно-командных сигналов поступает на один вход элемента 80 умножения, на другой вход которого
включении питания на выходе одновиб :ратора 40 появляется кратковременный сигнал 1, проходящий через третий
вход блока 36 и элементы 60 - 63 ИЛИ „„„„ „
,, , поступает через седьмой вход блока
на нулевые входы триггеров 66-70,до -л ni/- j.и
37 с выхода Коэффициент передачи переводя их в нулевое состояние. «
задатчика 39 сигнал U цп
С выхода элемента 80 умножения сигнал Ui, кл поступает на
„.„ „п „ делимый вход элемента 77 деления, на 1 с выхода Дистанционньи 45 делительный вход которого через восьмой вход блока 37 с выхода Скорость перемещения задатчика 39 поступает сигнал U-.
задатчика 39.
Триггеры 66 - 69 переводятся в нулевое состояние также при приходе на пятьй. вход блока 36 кратковременного сигнала режим
Блок 37 вьщачи позиционно-командных сигналов работает следуюпщм образом.
С выхода Период задатчика 39 через шестой вход блока 37 вьщачи по- зиционно-командных сигналов сигнал Up, пропорциональный заданному пери50
На выходе элемента 77 деления появляется сигнал
оду
поступает на управляющий вход
и,
7Г
UiJ, Uc
генератора 78 с регулируемым периодом следования импульсов и на второй множительный вход элемента 79 умножения. Кратковременные импульсы 1 с периодом следования ь с выхода генератора 78, при наличии сигналов 1 с выхода инвертора 76, подаются на тактовый вход сумматора 82 и на управляющий вход коммутатора 75, при этом сигнал с второго выхода Весовая производительность вычислительно-контролирующего блока 35 Up; через второй вход блока 37 выдачи позиционно-ко
0 маидных сигналов и информационные вход и выход коммутатора 75 с периодом следования о поступает на первые множительные входы элементов 79 и 81 умножения. На выходе элемента
5 79 умножения в i-й момент времени
появляется сигнал с периодом следования
TU;,
19
Up
, поступающий
на суммирующий вход сумматора 82, на выходе которого в i-й момент вре
II
Р
Ut U;,
и
оои
поступающий на вычитаемый вход элемьй вход элемента 83 вычитания че пятый вход блока 37 с выхода Зад ный вес порции поступает сигнал Upin выходе элемента 83 вычит ния появляется сигнал U, g, ирэп
, поступающий на второй вход
50
На выходе элемента 77 деления появляется сигнал
и,
7Г
UiJ, Uc
пропорциональный времени , поступающий на второй множительный вход элемента 81 умножения, на выходе которого с периодом следования t появляется сигнал U,,g, и, Up, Ui ,g у
поступающий на первый вход на 84.
При совпадении сигналов на выходе нуль-органа 84 и выходе Полное раздвижение блока 37 появляется сигнал
При наличии сигнала 1
путевого выключателя 32 крайне раздвинутого положения раздвижных ножей 1 и 2, поступающего на первый вход элемента 85 ИЛИ и на вход инвертора 76 через третий вход блока 37, на втором выходе Ножи не в крайне сдвинутом положении блока 37 исчезает сигнал 1, через элемент 85 ИЛИ происходит также обнуление сумматора 82 и прекращается подача импульсов с генератора 78 на коммутатор 75 и сумматор 82. Процесс порционного дозирования завершен. При поступлении сигнала 1 с одновибратора 40 через первый вход блока 37 и элемент 85 ИПИ происходит обнуление сумматора 82 при включении питания.
Блок выдачи управляющих сигналов 38 работает следующим образом.
На первый вход нуль-органа 95 поступает через пятый вход блока 38 с второго выхода Весовая производительность сигнал Up; , а на второй вход через, шестой вход блока 38 с выхода Заданная весовая производительность задатчика 39 - сигнал Upj. При Up3 Up, появляется сигнал 1 на отрицательном выходе нуль-органа 95, который при наличии сигналов 1 на девятом, с второго выхода Ножи не в раздвинутом состоянии блока 37 выдачи позиционно-командных сигналов, и на четвертом, с третьего выхода Разрешение на перемещение блока 36 вьздачи командно-разрешающих сигналов.
Плужковый сбрасыватель ленточного конвейера, содержащий асимметрично установленные относительно продольной оси конвейера раздвижные ножи, имеющие неодинаковые длины и снабженные рабочей частью на передних поверхностях в виде полосы транспортерной ленты, каретку, подъемную площадку, систему рычагов для подъема и раздвижения ножей, электромеханичесвходах блока 38 проходит через элемент 89 И и элемент 92 ИЛИ на первый 5 ий привод со схемой управления, выход Раздвижение блока .38.включающей в себя путевые выключатег
Сигнал 1 на первом выходе Разд- ли крайних относительно продольной
оси конвейера положений раздвижных ножей, отличающийся тем.
50
вижение блока 38 появляется при наличии сигнала 1 на девятом входе блока 38, также при наличии сигнала 1 с второго выхода Раздвижение блока 36 на третьем входе блока 38 или при наличии сигналов 1 на седьмом, с выхода Раздвижение задатчика 39, и на втором, с первого выхода „ Дистанционный режим блока 36, входах блока 38.
При Up-j Up появляется сигнал 1 на положительном выходе нуль-ор- ,
что, с целью расширения функциональных возможностей, раздвижные ножи выполнены из потокочувствительного и идентичного ему контрольного ножей, шарнирно закрепленных с помощью осей и амортизаторов в раме, снабженной регулировочными упорами и рабочей частью в виде полосы транспортерной ленты на внутренней боковой поверхности, а в схему управления электро
10
1996920
гана 95, который при наличии сигнала 1 на четвертом и отсутствии сигнала 1 на первом,с выхода путевого выключателя 33 крайне сдвинутого положения раздвижных ножей 1 и 2, вхо. дах блока 38 проходит через элемент 91 И и элемент 93 РШИ на второй выход Сдвижение блока 38. Сигнал 1 на втором выходе Сдвижение блока 38 также появляется при отсутствии сигнала на первом и наличии сигна
лов 1 на втором и восьмом, с выхода Сдвижение задатчика 39, входах
блока 38,
Таким образом, плужковый сбрасыватель, снабженный специальными раздвижными ножами и расширенной схемой управления, может быть использован для автоматического непрерывного либо автоматического порционного, непрерывного в течение набора заданной порции, весового дозирования сыпучего материала с одновременной самоустановкой углов раздвижных ножей в соответствии с количеством поступающего на ножи материала и контролем за полным износом рабочих частей раздвижных ножей, что значительно повышает
эффективность работы плужкового сбрасывателя.
Формула изобретения
Плужковый сбрасыватель ленточного конвейера, содержащий асимметрично установленные относительно продольной оси конвейера раздвижные ножи, имеющие неодинаковые длины и снабженные рабочей частью на передних поверхностях в виде полосы транспортерной ленты, каретку, подъемную площадку, систему рычагов для подъема и раздвижения ножей, электромеханичес ий привод со схемой управления, включающей в себя путевые выключатег
что, с целью расширения функциональных возможностей, раздвижные ножи выполнены из потокочувствительного и идентичного ему контрольного ножей, шарнирно закрепленных с помощью осей и амортизаторов в раме, снабженной регулировочными упорами и рабочей частью в виде полосы транспортерной ленты на внутренней боковой поверхности, а в схему управления электромеханическим приводом введены измерительные преобразователи угловых перемещений осей потокочувствительных и контрольных ножей и электромеханического привода, силоизмерительные I преобразователи а;мортизаторов разд- вижных ножей, вычислительно-контролирующий блок, блок вьщачи командно- разрешающих сигналов, блок вьщачи по- зиционно-командных сигналов, блок вьздачи управляющих сигналов, одно- вибратор, задатчик и путевой выключатель опущенного положения подъемной площадки, а выходы измерительных преобразователей угловых перемещений осей потокочувствительных и контрольных ножей и силоизмерительных преобразователей амортизаторов раздвижных ножей подключены к первьм восьми входам вычислительно-контролирующего I блока, а первый выход задатчика под- Iключен к девятому входу вычислитель- ; но-контролирующего блока, а выход первого путевого выключателя крайнего положения подключен к десятому входу вычислительно-контролирующего блока и к первому входу блока.вьщачи командно-разрешающих сигналов, к второму входу которого подключен пер- вый выход вычислительно-контролирую- щего блока, к одиннадцатому входу которого подключен путевой выключа- I тель опущенного положения, а выход : второго путевого выключателя крайне- го положения подключен к первому I входу блока вьщачи управляющих сиг- I налов, первый и второй выходы которо- го подключены к первому и второму входам электромеханического привода.
а выход одновибратора подключен к первому входу блока вьщачи позици- онно-командных сигналов и к третьему входу блока выдачи командно-разрешающих сигналов, первый, второй и третий выходы которого подключены соответственно к второму, третьему и четвертому входам блока вьщачи управляюQ сигналов, пятый вход которого
соединен с вторым выходом вьшислитель- но-контролирующего блока и с вторым входом блока вьщачи позигщонйо-командных сигналов, третий вход которо5 го соединен с десятым входом вычислительно-контролирующего блока, к четвертому входу которого подключен измерительный преобразователь угловых перемещений привода, а второй, тре0 тий, четвертый и пятый выходы задатчика подключены соответственно к четвертому, пятому, шестому и седьмому входам блока вьщачи командно-разрешающих сигналов, к восьмому входу
5 которого подключен внешний сигнал, а шестой, седьмой и восьмой выходы задатчика. подключены соответственно к шестому, седьмому и восьмому входам блока вьщачи управляющих сигналов, а
0 девятый, десятый, одиннадцатый и двенадцатый выходы задатчика подсоединены соответственно к пятому, шестому, седьмому и восьмому входам блока выдачи позиционно-командных сигналов,
5 первый выход которого подключен к
девятому входу блока вьщачи командно- разрешающих сигнешов, а второй - к девятому входу блока вьщачи управляющих сигналов.
Ви.д/ f9 2ff
//
nil I
21 25 26
фаг.2
В Фг/91
Вадб
2п /д
г/ г/
фае.З
19
/
Е 26
/ /7
х
ВадВ
лг
фиг. 5
Cth/f.7
87
Г
/
Jb
| Плужковый сбрасыватель ленточного конвей ра | 1976 |
|
SU579205A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Плужковый сбрасыватель ленточного конвейера | 1980 |
|
SU925811A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
