14
дающего конвейера 13, начиная от весов 5, а также на загрузочном кон-- вейере 10 и на участке свободного падения концентрата в вагон 18, и постоянно вычисляется веслС концентрата, который попаде 1 в вагон 18 после появляения команды на окончание загрузки. Этот сигнал непрерьшно
поступает в вычислительный блок 3, в котором суммируется с текущим значением веса загружаемого вагона, снимаемым с цифрового выхода платформенных весов 17. При вьтолнении условия ,дд формируется команда на окончание загрузки вагона 18. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1982 |
|
SU1173190A1 |
| Конвейерные весы | 1981 |
|
SU974136A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| Устройство для погрузки сыпучего материала в железнодорожные вагоны | 1976 |
|
SU659489A1 |
| УСТАНОВКА ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ СОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1964 |
|
SU166601A1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Микропроцессорное устройство управления горизонтальным затвором с электромеханическим приводом для загрузки железнодорожных вагонов | 1991 |
|
SU1837042A1 |
| Устройство для автоматического контроля веса материала в бункерах | 1980 |
|
SU964475A2 |
Целью изобретения является повышение точности дозирования за счет учета количества концентрата, находящегося в свободном падении после по.- дачи сигнала об окончании загрузки вагона.. Для этого в устройстве при помощи блока 14 моделирования нагрузки, связанного с одной стороны через аналого-цифровой преобразователь (АЩ1) 16 с дополнительным аналоговым выходом мгновенной производительности электромеханических конвейерных весов 5, а с другой стороны - с вычислительным блоком 3, моделируется интенсивность нагрузки на участке note (/)
1
Изобретение относится к управлению загрузкой железнодорожных вагонов с использованием весоизмерительных средс тв и предназначено, в частности для дозированной загрузки вагонов железнодорожным концентратом 1В горнорудной промышленности.
Целью изобретения является повышение точности дозирования.
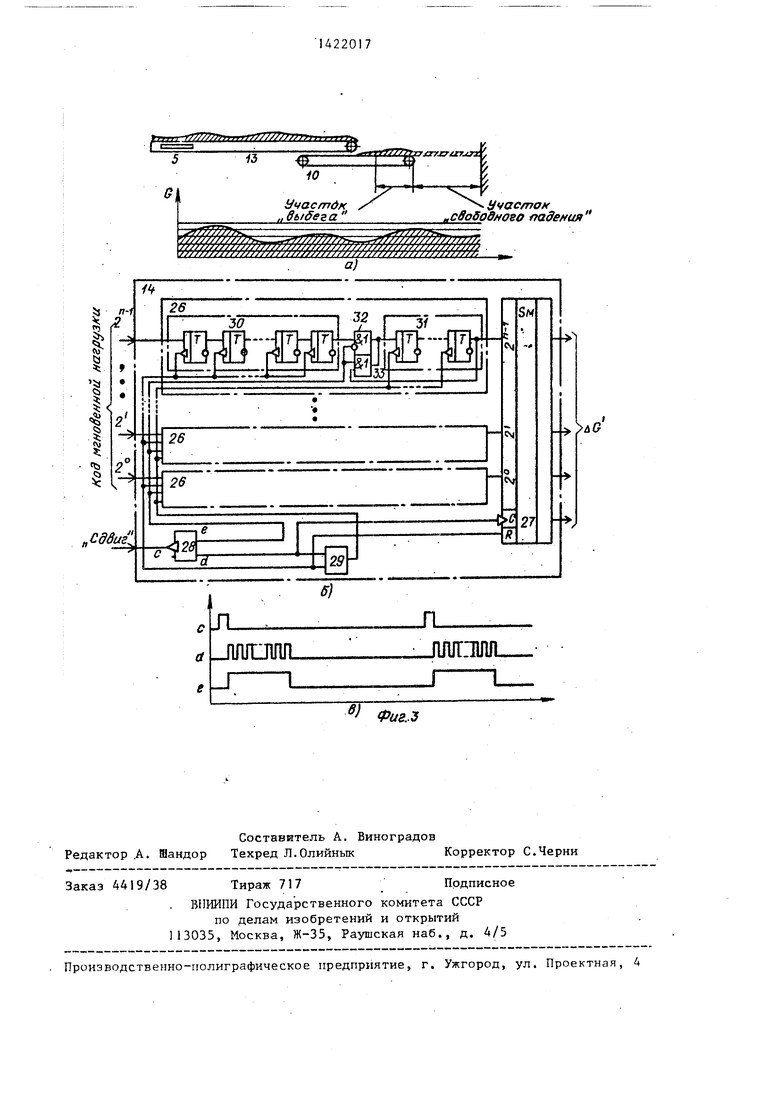
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - функциональная схема вычислительного блока; на фиг. 3 - функциональная схема блока моделирования нагрузки на конвейерной ленте.
Устройство содержит задатчик 1 типа вагонов, блок 2 коэффициентов, вычислительный блок 3, логический блок 4 управления, электромеханические конвейерные весы 5, датчик 6 перемещения тягового агрегата 7, бло 8 управления приводом тягового агрегата 7, блок 9 управления приводом загрузочного конвейера 10, датчик 11 положения вагонов, блок 12 управления приводом подающеЬо конвейера 13, блок 14 моделирования нагрузки, датчик 15 перемещения ленты конвейера, аналого-цифровой преобразователь 16, платформенные весы 17 с цифровым выходом и загружаемые вагоны 18.
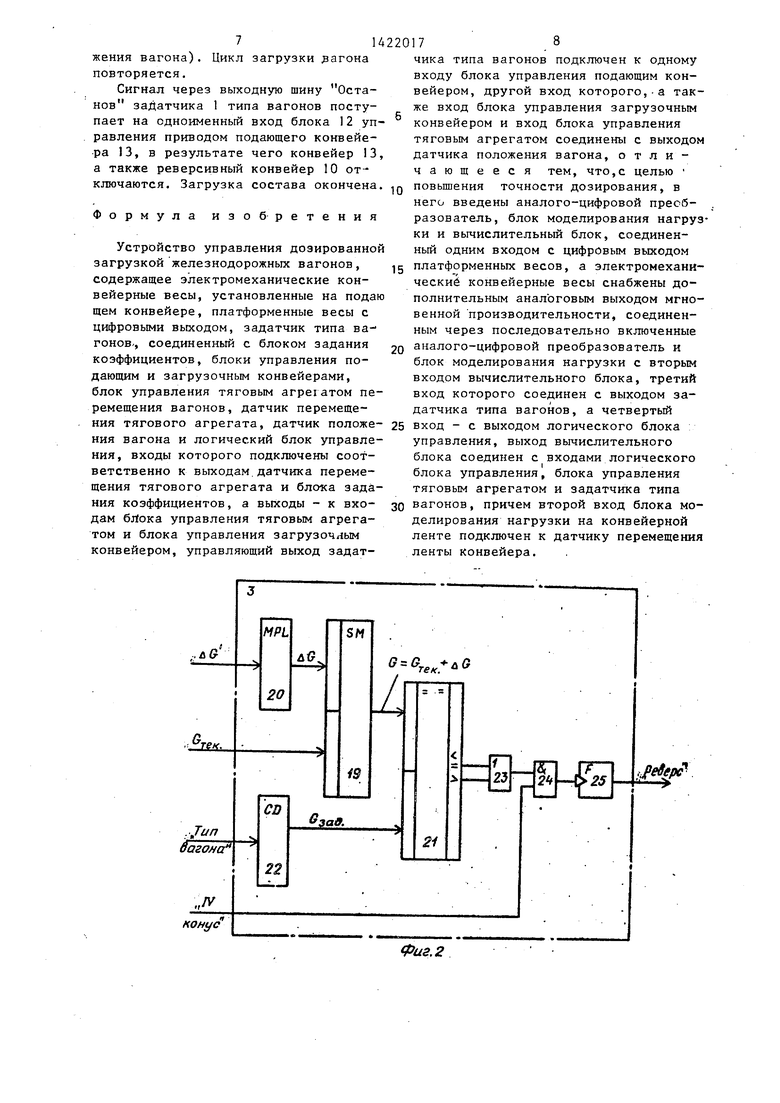
Вычислительный блок 3 (фиг. 2) содержит комбинационный сумматор 19, одни входы которого через блок 20 : гнножения соединены с входами ЛС блока 3, а его вторые.входы образуют входы блока 3. Вькоды сумматора 19 соединены с одними входами схе ;чы 21 сравнения, вторые входы которо подключены к выходу шифратора 22, входы которого образуют входные шины
0
Q
0
5
0
5
Тип вагона вычислительного блока 3, при этом выходы Равно и Больше схемы 21 сравнения через элемент ИЛИ 23 подключены к одному входу элемента И 24, второй вход которого образует вход IV конус вычислительного блока 3, а выход соединен с входом формирователя 25 импульса, выход которого образует выходную шину Реверс вычислительного блока 3.
Блок 14 моделирования нагрузки (фиг. Зб) содержит ri последователь- ньрс регистров 26.1-26.П (п - разрядность двоичного кода мгновенной нагрузки на конвейерной ленте), счетные входы которых соединены с соответствующими информационными входами блока 14, а выходы - с одноименными входами накапливающего сумматора 27. Сдвиговый вход блока 14 соединен с входом генератора 28 импульсов, входом установки в О накапливающего сумматора 27 и одним входом элемента ИЛИ 29, второй вход которого подключен к импульсному выходу генератора, связанному с прямым динамическим.входом записи накапливающего сумматора 27, выходы которого образуют выходы ЛС блока 14.
Каждый регистр 26 блока 14 состоит из двух регистров 30 и 31, соединенных последовательно через элемент И 32, причем второй регистр 31 выполнен с кольцевой обратной связ1 ю через элемент И 33 (выход триггера старшего разряда регистра 31 через элемент И 33 соединен с входом триггера его младшего разряда).
Вторые входы элементов И 32 и 33 всех регистров 26.1-26.П объединены и подключены к потенциальному выходу
31Д
генератора 28 импульсов, при этом у всех первых элементов И 32.1-32.П второй вход вьтолнен инверсным, а выходы элементов И 32 и 33 в каждом регистре 26 связаны по ИЛИ,
Шины сдвига всех первых регистров 30.1-30.п подключены к сдвиговому входу блока 14, а шины сдвига всех вторых регистров 31.1-31.П соединены с выходом элемента ИЛИ 29.
Устройство работает следующим образом.
Перед началом погрузки оператор на m переключателях задатчика 1 типа вагонов набирает шифры типов вагонов в последовательности их размещения в составе, начиная с головного вагона. На i-й выходной шине Тип вагона задатчика 1 присутствует единич- ный сигнал, который поступает в вычислительный блок 3 на соответствующий i-й вход Тип вагона, а также на шифратор 22, где преобразуется в двоичный код , соответствующий заданному значению веса вагона (брутто данного типа.
Одновременно единичный сигнал с i-й выходной шины Тип вагона задатчика 1 типа вагонов поступает в блок 2 коэффидиентов и формирует на его выходных шинах К1 и К2 двоичные коды
определяющего
коэффициента К1 „-- Ug
количество концентрата, подлежащего размещению в одном конусе, и коэффициента К2 г , определяющего длину
щага (расстояние между соседними конусами). Двоичные коды коэффициентов К1 и К2 поступают в логический блок 4
После ввода в устройство данных о типах вагонов состава оператор с помощью дистанционно управляемого тягового агрегата подает состав на по- -грузочный путь. Дальнейшая работа устройства до окончания загрузки последнего вагона происходит автоматически.
Головной вагон 18 подтягивается под точку начала загрузки и воздействует на датчик 11 положения вагона (например, фотореле), в результате чего последовательно запускаются реверсивный загрузочный конвейер 10 и подающий наклонный конвейер 13, - причем реверсивный конвейер 10 запускается в-направлении Назад, так как в исходном состоянии триггер на
5 0 5
О
5
0
5
0
5
правления в логическом блоке 4 на-
ходится в нулевом состоянии и с егс инверсного выхода единичный сиг илл поступает на выходную шину Назад логического блока 4, связанную с одноименным входом блока 9 управления приводом конвейера 10.
Одновременно сигнал с выхода чика 11 положения вагона поступает на один из входов Стоп блока 8 управления приводом тягового агрегата 7 и приводит к его остановке. Головной вагон при этом занимает исходное положение под загрузочным конвейером 10, по которому концентрат поступает в хвостовую часть вагона, образуя первый конус.
При движении потока концентрата по конвейеру 13 и далее по реверсивному конвейеру 10 в загружаемый вагон 18 конвейерные весы 5 на своем импульсном выходе вырабатывают импульсы, частота следования которых пропорциональна интенсивности потока, а на аналоговом выходе - сигнал, пропорциональный мгновенной производительности конвейера.
Весовые импульсы с импульсного выхода конвейерных весов 5 поступают на вход Вес логического блока 4, на входе разрешения работы которого присутствует разрешающий единичный сигнал, а на шины управления поступает двоичный код коэффициента деления К1. На выходе логического ключа 4 появляется каждый К1-й из поступивших на его вход весовых импульсов, свиде- тельствующи15 об окончании отсыпки загружаемого конуса. Это обеспечивает грубую загрузку первых трех конусов. Во время загрузки первых трех конусов на цифровом выходе платформенных весов 17 присутствует.двоичный код, ко- торьш,однако, не может характеризовать процесс загрузки вагона, так как загружаемый вагон еще не стоит полностью на платформе, в то же время тяговый агрегат или соседний загруженный вагон еще не сошел с платформы. Поэтому при загрузке первых трех конусов вычислительный блок 3 забло кирован нулевым сигналом, присутствующим на выходной шине IV конус . логического блока 4. Это исключает возможное ложное формирование команды Реверс в результате резких динамических нагрузок в моменты наезда (съезда) вагона на платформу весов.
После отсыпки первого конуса сигналы, снимаемые с выходных шин Вперед и Назад логического блока 4, меняются на противоположные. Загрузочный конвейер 10 реверсируется в направлении Вперед и поток концентрата поступает в головную часть ва- гана,
По окончании загрузки второго конуса через выходную шину Шаг логического блока 4 в блок 8 управления приводом тягового агрегата 7 по- С йупает команда на движение направления Вперед. Состав протягивается в У1 |азанном направлении. Путевые импульсы, вырабатываемые датчиком 6 линейных перемещений тягового агрега Td 7, поступают на вход Движение логического блока 4.
После протягивания загружаемого вагона на один шаг на выходную шину Стоп логического блока 4, связанную с одноимённым входом блока 8 уп- рфвления приводом тягового агрегата 7 J поступает сигнал и состав останавливается, при этом-осуществляется загрузка третьего конуса.
Появление третьего весового импульса вновь приводит к формированию команды тяговому агрегату 7 на движение Вперед, а после протягивания загружаемого вагона на следующий шаг состав вновь останавливается и начинается загрузка последнего четвертого конуса.
После протягивания состава на два шага загружаемый головной вагон пол- но(тьк1.устанавливается на платформе весов. Дальнейшая загрузка вагона до заданной дозы происходит при его не- прерьшном взвешивании и с учетом тог количества, концентрата, которое еще попадет в вагон после-появления команды на окончание загрузки, чем обеспечивается точная догрузка вагона до заданной дозы.
Работа вычислительного блока 3 при загрузке четвертого конуса заключается в следующем.
На входы вычислительного блока 3 с цифрового выхода платформенных весов 17 поступает двоичный код текущего веса загружаемого вагона
( ) , а на входы uG с выхода -бло- 515 гового агрегата 7, включается тяго- ка 14 моделирования нагрузки - двоич- вый агрегат и состав протягивается иый код, пропорциональный весу концентрата (&G), который еще попадает
вперед до тех пор, пока второй вагон не достигает точки начала загрузки (момент срабатьшания датчика I1 поло
13 вагон после появления команды на
окончание загрузки, причем двоичный код приводится в блоке 20 умножения к размерности двоичного кода G- , т.е. к цене бита информации на цифровом выходе платформенных весов 17. Блок 20 умножения выполняет функцию К, где К г коэффициент пропорциональности, величина которого
определяется экспериментально и зависит от частоты следования импульсов датчика 15 перемещения ленты конвейера и от разности аналого-цифрово- Vo преобразователя 16. После приведения к одной размерности двоичные коды G и uG суммируются в комбинационном сумматоре 19 и результат ( +uG) непрерывно сравнивается на схеме 21 сравнения
с двоичным кодом заданного веса вагона (С,ад), поступающим с выхода шиф-.
ратора 22.
Загрузка четвертого конуса продо114
жается до тех пор, пока вес брутто вагона с учетом веса концентрата ДО не достигает заданного значения, т.е. пока не выполнится условие Стек AGiG,a .
При выполнении указанного условия на выходе Равно (Больше) схемы 21 сравнения появляется единичный сигнал, который через элементы ИЛИ 23 и 24 запускает формирователь 25
импульса. Последний вырабатьгаает
импульсный сигнал, который поступает на выходную шину Реверс вычислительного блока 3. В логический блок 4 поступает сигнал, который возвращает его в исходное состояние, что приводит к реверсированию загрузочного конвейера 10 в направлении Назад и, следовательно, переключению потока концентрата в след ующий вагон..
Одновременно этим же сигналом его задним фронтом) , поступающим на так- - товый вход т-канального кольцевого распределителя задатчика 1 типа ваго-; нов из его первого разряда сдвигается
во второй. При этом на выходные шины Тип вагона задатчика 1 поступает шифр типа второго вагона. Этим же сигналом, поступившим на вход Вперед блока 8 управления приводом тягового агрегата 7, включается тяго- вый агрегат и состав протягивается
вперед до тех пор, пока второй вагон не достигает точки начала загрузки (момент срабатьшания датчика I1 положения вагона). Цикл загрузки агона повторяется.
Сигнал через выходную шину Останов задатчика 1 типа вагонов поступает на одноименный вход блока 12 управления приводом подающего конвейера 13, в результате чего конвейер 13, а также реверсивный конвейер 10 от ключаются. Загрузка состава окончена.
Формула изобретения
Устройство управления дозированной загрузкой железнодорожных вагонов, содержащее электромеханические конвейерные весы, установленные на подаю щем конвейере, платформенные весы с цифровыми выходом, задатчик типа вагонов-, соединенный с блоком задания коэффициентов, блоки управления подающим и загрузочным конвейерами, блок управления тяговым агрегатом перемещения вагонов, датчик перемещения тягового агрегата, датчик положения вагона и логический блок управления, входы которого подключены соответственно к выходам.датчика перемещения тягового агрегата и блока задания коэффициентов, а выходы - к входам блока управления тяговым агрегатом и блока управления загрузочньм конвейером, управляющий выход задат
чика типа вагонов подключен к одному входу блока управления подающим конвейером, другой вход которого,-а также вход блока управления загрузочным конвейером и вход блока управления тяговым агрегатом соединены с выходом датчика положения вагона, отличающееся тем, что,с целью повьшения точности дозирования, в него введены аналого-цифровой преобразователь, блок моделирования нагрузки и вычислительный блок, соединенный одним входом с цифровым выходом платформенных весов, а электромеханические конвейерные весы снабжены дополнительным аналоговым выходом мгновенной производительности, соединенным через последовательно включенные
аналого-цифровой преобразователь и блок моделирования нагрузки с вторым входом вычислительного блока, третий вход которого соединен с выходом задатчика типа вагонов, а четвертый
вход - с выходом логического блока управления, выход вычислительного блока соединен с входами логического блока управления, блока управления тяговым агрегатом и задатчика типа
вагонов, причем второй вход блока моделирования нагрузки на конвейерной ленте подключен к датчику перемещения ленты конвейера.
фиг. 2
„Сдви
в)
Участо1 свободного падения
лС
Фиг..з
| Устройство для погрузки сыпучего материала в железнодорожные вагоны | 1976 |
|
SU659489A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1982 |
|
SU1173190A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
