114
Изобретение относится к робототехнике и может быть использовано при разработке автономных тихоходных транспортных средств для автоматизированных линий обработки заготовок на синхронно работающем оборудовании
Цель I изобретения - расширение технологических возможностей за счет улучшения динамических характеристик
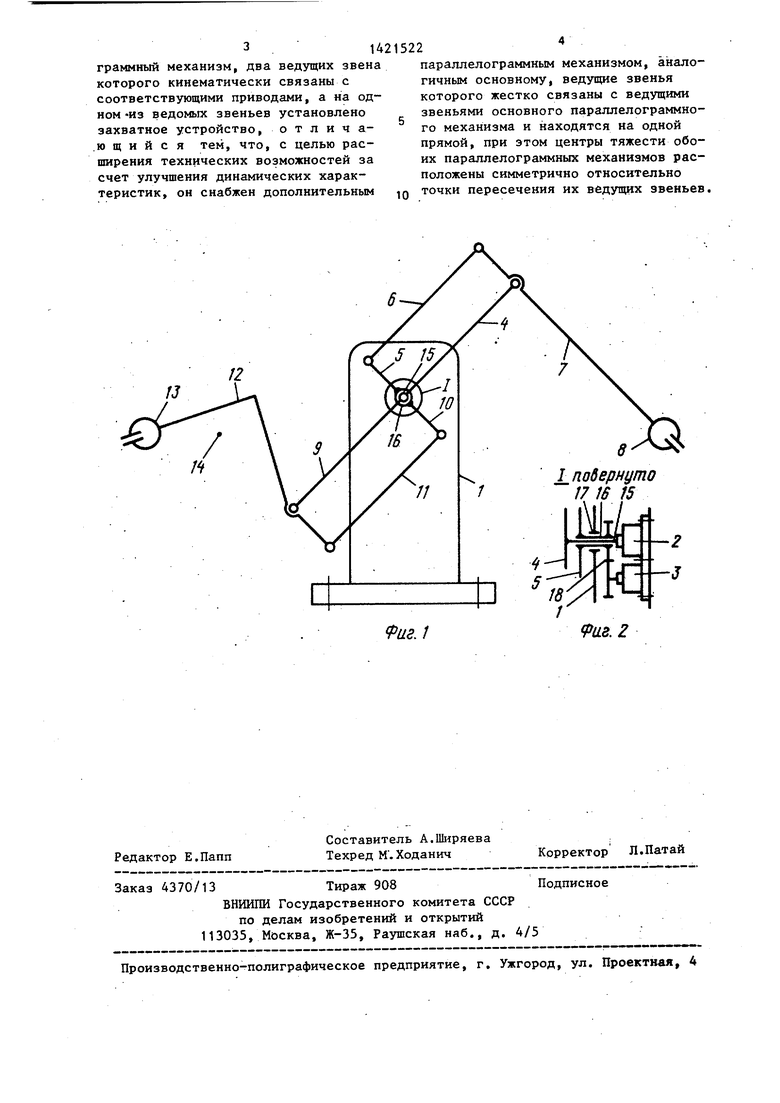
Йа фиг. 1 представлена кинематическая схема исполнительного органа манипулятора; на фиг. 2 - узел I на фиг. 1.
Исполнительный орган манипулятора I состоит из корпуса 1 с размещенными в нем приводами 2 и 3 и аналогичными xJCHoBHbiM и дополнительным паралле- лограммными механизмами. Основной параллелограммный механизм образован двумя ведущими звеньями 4 и 5 и двумя ведомыми звеньями 6 и 7, последнее из которых несет захватное устройство В.
Дополнительный параллелограммный механизм образован также двумя веду- .щими звеньями 9 и 10 и двумя ведомыми звеньями 11 и 12, последнее из которых несет захватное устройство 13 и может иметь изломы для осуществления опускания его конца сверху вниз.
Ведущие звенья 9 и 10 дополнительного параллелограммного механизма жестко связаны с соответствующими ведущими звеньями 4 и 5 основного параллелограммного механизма и распо ложены на одной прямой, и, кроме этого, кинематически связаны с выходными валами приводов 2 и 3. Центр 14 тяжести звена 12 симметричен центру тяжести звена 7 относительно оси 15, на которой вращаются звенья 4 и 9. Центры тяжести звеньев 4и 9и 5и 10, одинаковых по конструкции, совпадают с осью V15. Центры тяжести звеньев 6 и 11, одинаковых по конструкции, симметричны относительно оси 15. На концах звеньев 7 и 12
,
установлены соответственно захватные устройства 8 и 13, одинаковые по конструкции, а их центры тяжести также симметричны от- носительно оси 15. На оси 15 посредством полой оси 16 установлено звено 10. В свою очередь ось 16 установлена в подшипнике 17, закрепленном в корпусе 1, на котором закреплены реверсивные приводы 2 и 3. Привод 2 сопряжен со звеньями 4 и 9 через ось 15, а привод 3 сопряжен со
10
15
20
25
30
35
40
звеньями 5 и 10 ка оси 16 через кинематическую передачу 18. Основной параллелограммный механизм со звеном
7находится вьше дополнительного параллелограммного механизма со звеном 12. Последнее имеет изломы (перегибы) : первый перегиб в сторону оси 15 вокруг шарнира со звеньями
4 и 9 под острым углом и второй перегиб в средней части звена 12 в обратную сторону под углом, большим прямого. Это обеспечивает подведение захватного устройства 13 к горизонтальной плоскости и возможность брать с нее детали в поле сил тяжести.
Исполнительный орган манипулятора работает следующим образом.
На приводы 2 и 3 подают питание, необходимое для их действия. При этом одновременная работа приводов 2 и 3, вращающих оси 15 и 16 в одном направлений, приводит к вращению захватных устройств 8 и 13 относительно оси 15, а взаимное расположение звеньев 4-7 и 9-12 относительно друг друга не меняется. Захватные устройства 8 и 13 перемещаются.в ; дугообразным траекториям: одно из них поднимается, а другое опускается. Работа одного из приводов 2 и 3 приводит к одновременному приближению или удалению захватных устройств
8и 13 между собой относительно оси 15 по дугообразным траекториям. Одновременная работа приводов 2 и 3 во взаимно противоположных направлениях усиливает этот вид перемещения.
При любых возможных траекториях движения захватных устройств 8 и 13 центры тяжести всех подвижных элементов исполнительного органа приведены к оси 15.
Центр тяжести звеньев обоих па- раллелограммных механизмов при любом их расположении совпадает с центром оси 15. Траектории движений звеньев 4,. 9 и 10 симметричны оси 15, звена 6 - звену 11, звена 7 - звену 12, а траектория захватного устройства 8 симметрична траектории захватного устройства 13.
Формула изобретения
Исполнительный орган манипулятора, содержащий корпус, размещенные в нем приводы и основной параллелограммный механизм, два ведущих звена которого кинематически связаны с соответствующими приводами, а на одном -из ведомых звеньев установлено захватное устройство, о т л и ч а- .ю щ и и с я тем, что, с целью расширения технических возможностей за счет улучшения динамических характеристик, он снабжен дополнительным
параллелограммным механизмом, аналогичным основному, ведущие звенья которого жестко связаны с ведущими звеньями основного параллелограммно- го механизма и находятся на одной прямой, при этом центры тяжести обоих параллелограммных механизмов расположены симметрично относительно точки пересечения их ведущих звеньев.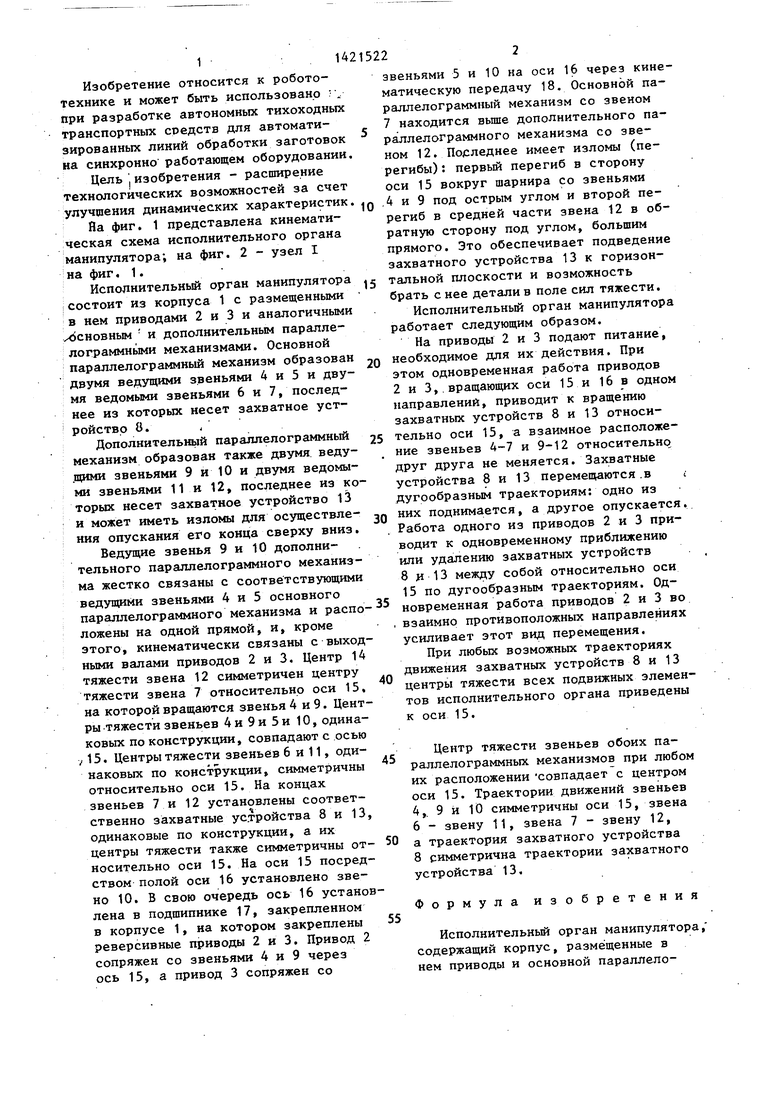
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2720514C1 |
| ПРОСТРАНСТВЕННЫЙ G-РОБОТ | 2021 |
|
RU2758392C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| Манипулятор | 1986 |
|
SU1454684A1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
Изобретение относится к робототехнике и может быть использовано при разработке автономных тихоходных транспортных средств для автомати- зированных линий обработки заготовок на синхронно работакицем оборудовании. Целью изобретения является расширение технологических возможностей за счет улучшения динамических характеристик. Это достигается тем, что основной параллелограммный механизм при любом положении звеньев уравновешен дополнительным параллелограммным механизмом, а введение второго захватного устройства позволяет совмещать операции загрузки-разгрузки технологического оборудования. 2 ил.
/J
и.г.1
