Изобретение относится к машиностроению, и в частности к робототехнике, и может быть использовано для выполнения групповых технологических операций несколькими разными рабочими органами в автоматических линиях, сборочных конвейерах, многопозиционных обрабатывающих центрах и в медицине.
Известен пространственный робот, содержащий подвижное исполнительное устройство привода выходного звена с рабочим органом, кинематически связанное с опорным основанием посредством шести раздвижных опорных ног и двенадцати сложных сферических шарниров с приводом от шести гидроцилиндров (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, с. 28, рис. 1.20, схема «Платформа Стюарта») - аналог.
Недостатками известного пространственного робота являются сложная конструкция и низкая функциональность применения робота, выполняемого с выходным звеном одного рабочего органа.
Наиболее близким по своей сущности и достигаемому эффекту является пространственный робот, содержащий подвижное исполнительное устройство привода выходного звена с рабочим органом, выполненное в виде пространственного рычажного механизма перемещения подвижной платформы с одним рабочим органом и передачей движения через сферические и цилиндрические шарниры от трех кинематических связанных между собой приводных двигателей - для образования пространственного робота с тремя степенями свободы (схема пространственного робота-манипулятора в статье Мирзаев Р.А., Смирнов Н.А. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм)» / Вестник Сибирского государственного аэрокосмического университета, 2021, Вып. 4. с. 46-50, рис. 1) - прототип.
Недостатками указанного пространственного робота являются сложность конструкции со сферическими шарнирами, в которой низкая функциональность привода только одного рабочего органа ограничивает его применение в групповых технологических операциях с различными рабочими органами и сужает рабочее пространство данного робота из-за малого числа степеней его свободы W=3 (рис. 4 в той же статье, 2021, Вып. 4).
В основу изобретения положена техническая задача, заключается в упрощении конструкции, увеличении функциональности робота и его рабочего пространства с приводом посредством простых цилиндрических шарниров устройства нескольких рабочих органов с увеличенным числом степеней свободы при выполнении различных технологических операций.
Получение технического результата достигается за счет того, что пространственный G-робот содержит подвижное исполнительное устройство, выполненное в виде двух раздельно приводимых и взаимодействующих между собой манипуляторов, установленных на общем опорном основании посредством двух поворотных платформ с перпендикулярными между собой осями вращения и выполненных с цилиндрическими шарнирами на основе одноподвижных вращательных кинематических пар.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4 и фиг. 5.
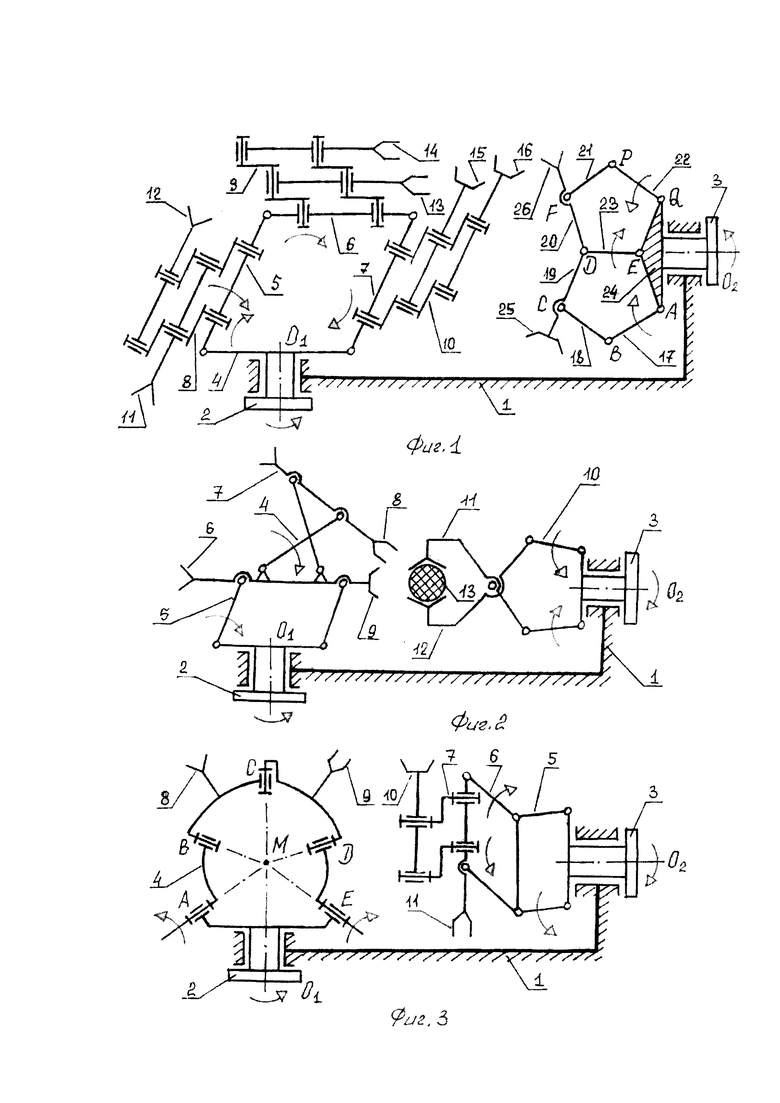
На фиг. 1 изображен общий вид пространственного G-робота, содержащего подвижное исполнительное устройство, выполненное в виде двух раздельно приводимых и взаимодействующих между собой манипуляторов, установленных на общем опорном основании 1 посредством двух поворотных платформ 2 и 3 с перпендикулярными между собой осями О1 и О2 вращения этих поворотных платформ.
Один из упомянутых манипуляторов установлен на поворотной платформе 2 и выполнен в виде четырехзвенного плоского шарнирного механизма 4 с перпендикулярно установленными на его подвижных звеньях 5, 6 и 7 параллелограммными шарнирными механизмами 8, 9 и 10, шатуны которых сблокированы с рабочими органами 11, 12, 13, 14, 15 и 16. Другой из упомянутых манипуляторов установлен на поворотной платформе 3 и выполнен в виде восьмизвенного плоского шарнирного механизма, звенья которого 17, 18, 19, 20, 21, 22, 23 и 24 образуют два пятисторонних замкнутых контура ABCDE и EDFPQ с одной общей стороной ED и соединены между собой посредством цилиндрических шарниров А, В, C, D, E, F, P и Q с параллельными осями вращения, где на шатунах 19 и 20 установлены рабочие органы 25 и 26. Представленный (на фиг. 1) G-робот имеет W=9 степеней свободы, где приводные вращательные кинематические пары обозначены круговыми стрелками.
На фиг. 2 представлен вариант выполнения пространственного G-робота, в котором один из манипуляторов выполнен в виде четырехзвенного антипараллелограммного механизма 4, кинематически связанного с поворотной платформой 2 посредством четырехзвенного параллелограммного механизма 5 и содержит разные рабочие органы 6, 7, 8 и 9, а другой из манипуляторов установлен на другой поворотной платформе 3 и выполнен в виде пятизвенного плоского шарнирного механизма 10, шатуны которого сблокированы с взаимодействующими между собой рабочими органами 11 и 12, например, для захвата и пространственного ориентирования обрабатываемого изделия 13.
Представленный на фиг. 2 пространственный G-робот имеет W=6 степеней свободы и содержит установленные на шатунах механизмов 4, 5 и 6 рабочие органы 7, 8, 10, 11.
На фиг. 3 представлен вариант выполнения пространственного G-робота, в котором один из манипуляторов выполнен в виде установленного на одной из поворотных платформ 2 пятизвенного сферического шарнирного механизма 4 с пересечением в одной точке М внутри пятизвенника ABCDE осей всех цилиндрических шарниров. Другой из манипуляторов выполнен в виде последовательно установленных между собой на другой поворотной платформе 3 трех параллелограммных механизмов, два из которых 5 и 6 выполнены с параллельными между собой осями цилиндрических шарниров, а третий параллелограммный механизм 7 выполнен с перпендикулярным относительно первых двух механизмов 5 и 6 расположением осей цилиндрических шарниров. Представленная на фиг. 3 схема G-робота имеет W=7 степеней свободы и содержит установленные на шатунах механизмов 4, 6 и 7 рабочие органы 8, 9, 10 и 11, взаимодействующие между собой при выполнении групповых операций.
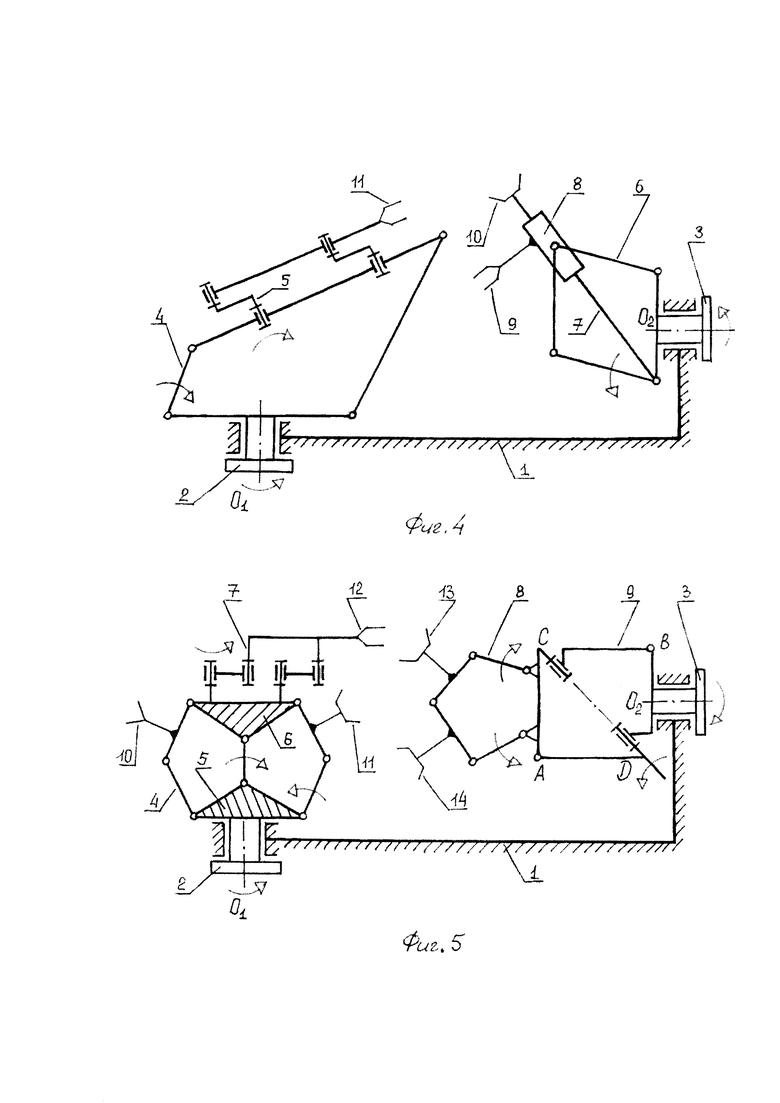
На фиг. 4 представлен вариант выполнения пространственного G-робота, в котором один из манипуляторов выполнен в виде установленного на одной из поворотных платформ 2 сборки двух четырехзвенных плоских механизмов в виде кривошипно-коромыслового 4 и параллелограммного 5 устройств, сблокированных между собой со взаимно-перпендикулярным расположением осей их цилиндрических шарниров. Другой из манипуляторов выполнен в виде сблокированного с другой поворотной платформой 3 шестизвенного плоского рычажного механизма 6 с установленным на его поворотной прямолинейной направляющей 7 ползуном 8 рабочего органа 9. Представленная на фиг. 4 схема G-робота имеет W=5 степеней свободы и содержит 3 рабочих органа 9, 10 и 11 для различных операций.
На фиг. 5 представлен вариант выполнения пространственного G-робота, в котором один из манипуляторов выполнен в виде установленного на одной из поворотных платформ 2 шестизвенного плоского шарнирного механизма 4 с двумя трехшарнирными звеньями 5 и 6, из которых трехшарнирное звено 5 закреплено на поворотной платформе 2, а другое трехшарнирное звено 6 сблокировано с четырехзвенным плоским шарнирным параллелограммом 7, оси вращения цилиндрических шарниров которого установлены параллельно оси вращения O1 данной поворотной платформы 2. Другой из манипуляторов в данном варианте G-робота выполнен в виде пятизвенного плоского шарнирного механизма 8, кинематически связанного с другой поворотной платформой 3 посредством четырехзвенного пространственного механизма 9 с двумя парами противоположно расположенных шарниров, из которых одна пара шарниров A и В выполнена с параллельными между собой осями вращения, а другая ара шарниров С и D выполнена соосными между собой. Представленная на фиг. 5 схема G-робота имеет W=8 степеней свободы и содержит пять рабочих органов 10, 11, 12, 13 и 14, взаимодействующих между собой при выполнении групповых технологических операций.
Работа представленного пространственного G-робота заключается в следующем.
Заданное в обоих манипуляторах устройства G-робота движение ведущих звеньев (число которых равно величине W и указано на фиг. 1-5 круговыми стрелками) преобразуется в требуемое пространственное движение установленных в обоих манипуляторах разных рабочих органов, взаимодействующих между собой при выполнении групповых технологических операцией.
Достигаемый в предлагаемом пространственном G-роботе положительный эффект заключается в упрощении конструкции, в также в расширении функциональности и рабочего пространства за счет увеличения до W=9 числа его управляемых степеней свободы и суммирования рабочих зон всех приводимых рабочих органов при выполнении ими в расширенном рабочем пространстве групповых технологических операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано для выполнения групповых технологических операций несколькими разными рабочими органами. Робот содержит подвижное исполнительное устройство привода выходного звена с рабочим органом, выполненное в виде двух раздельно приводимых и взаимодействующих между собой манипуляторов, установленных на общем опорном основании посредством двух поворотных платформ. Один манипулятор выполнен в виде установленного на одной из платформ четырехзвенного плоского шарнирного механизма с перпендикулярно установленными на его подвижных звеньях параллелограммными шарнирными механизмами. Другой манипулятор выполнен в виде сблокированного с другой поворотной платформой восьмизвенного плоского шарнирного механизма. Звенья механизма образуют два пятисторонних замкнутых контура с одной общей стороной и соединены между собой посредством цилиндрических шарниров с параллельными осями вращения. В результате обеспечивается упрощение конструкции робота и увеличение его рабочего пространства. 5 ил.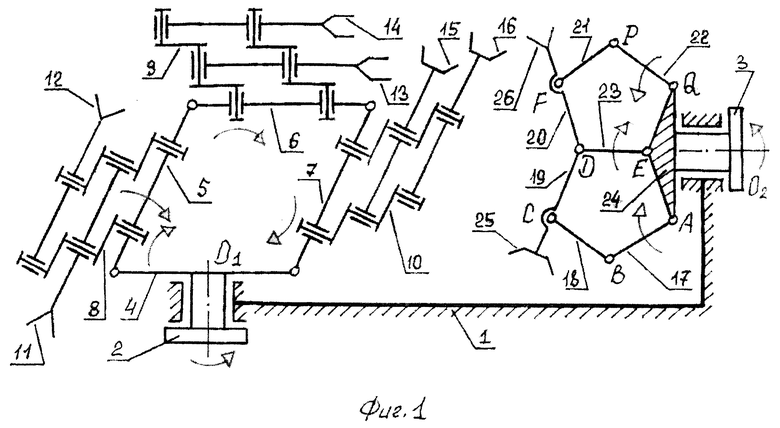
Пространственный робот, преимущественно для групповых технологических операций, содержащий подвижное исполнительное устройство привода выходного звена с рабочим органом, отличающийся тем, что подвижное исполнительное устройство выполнено в виде двух раздельно приводимых и взаимодействующих между собой манипуляторов, установленных на общем опорном основании посредством двух поворотных платформ с перпендикулярными между собой осями вращения и выполненных с цилиндрическими шарнирами на основе одноподвижных вращательных кинематических пар, при этом один из манипуляторов выполнен в виде установленного на одной из поворотных платформ четырехзвенного плоского шарнирного механизма с перпендикулярно установленными на его подвижных звеньях параллелограммными шарнирными механизмами, а другой манипулятор выполнен в виде сблокированного с другой поворотной платформой восьмизвенного плоского шарнирного механизма, звенья которого образуют два пятисторонних замкнутых контура с одной общей стороной и соединены между собой посредством цилиндрических шарниров с параллельными осями вращения с образованием пространственного робота с девятью степенями свободы.
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| RU 2202465 C2, 20.04.2003 | |||
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2008 |
|
RU2377116C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2011 |
|
RU2475347C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

