Фиг. 1
Изобретение относится к машиностроению, а именно к манипуляторам для механизации технологических процессов, и может быть использовано в g автоматических линиях штамповочного производства,
Цель изобретения - расширение тех- нологических возможностей за счет обеспечения перемадений захватного ю устройства в двух взаимно перпендику- лярных плоскостях,
На фиг,1 показан манипулятор, вид сбоку; на фиг,2 - то же, вид сверху; на фиг.З - параллелограммный меха- 15 низм I на фиг,4 - сечение А-А на фиг, 3; на фиг,5 - сечение Б-Б на фиг.З; на фиг,6 - кинематическая схема манипулятора.
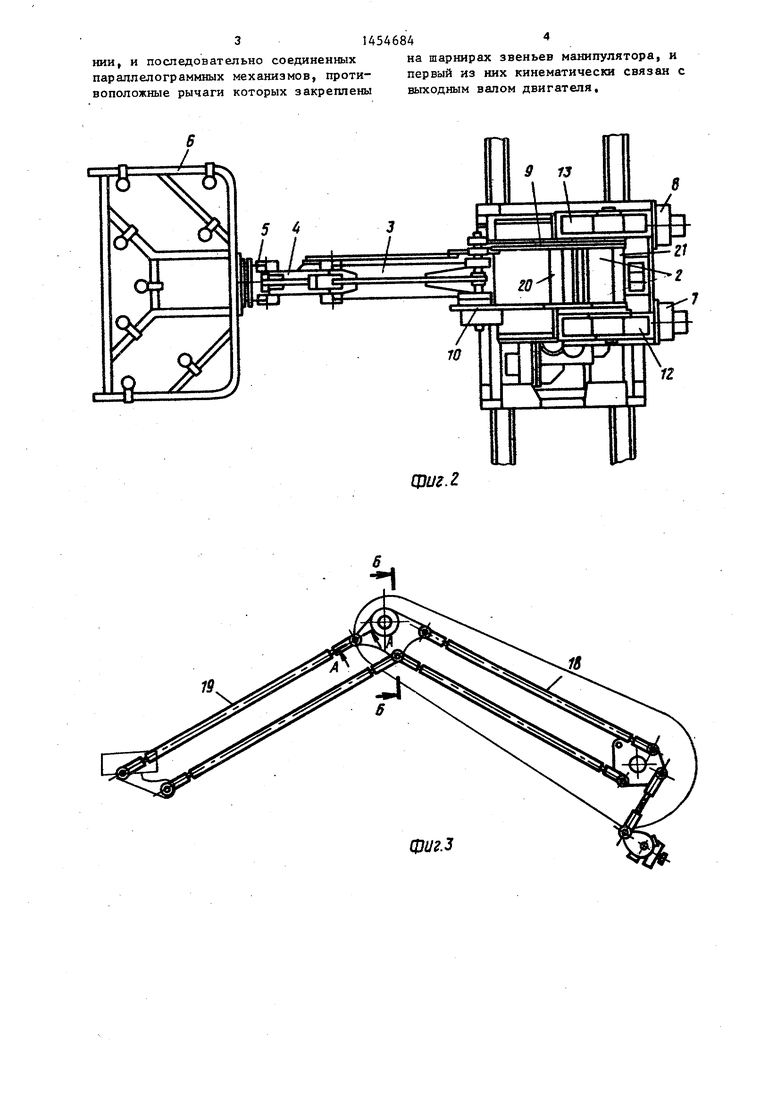
Манипулятор содержит основание , 20 шарнирно соединенные между собой звенья 2-5, первое из которых (2) связано .с основанием 1, а последнее (5) несет захватное устройство &, и основной 7 и дополнительный 8 приво- 25 ды перемещения этих звеньев. Звено 2 имеет две щеки 9 и 10, установленные на одной оси шарнира П со звеном 3 на расстоянии больше ширины каждого из остальных звеньев. За счет этого 30 звено 3 совместно со звеньями 2, 4 и 5 может свободно перемещаться между корпусами 12 и 13 основного 7 и дополнительного 8 приводов, установленными на основании 1, Звено 3 гори- 35 зонтального перемещения равно по длине звену 2 и соединено со звеном 4 шарниром 14, а звено 4 - со звеном 5 шарниром 15, Основной привод 7 состоит из двигателя с редукторами и40 последовательно соединенных цепных передач 16 и 17 с передаточным отношением It2, звездочки которых установлены на осях шарниров 11 и 14, связы- вакхдих звенья 2-4, при этом веду- 45 щая звездочка первой передачи непод- В1|жно закреплена на корпусе редуктора. Дополнительный привод 8 состоит из двигателя с редуктором и последовательно соединенных параллелограм- 50 toix механизмов 18 и 19, противоположные рычаги которых жестко связаны с шарнирами 11 и 14 звеньев 2 - 4f при этом передаточное отношение паралле- лограммных механизмов равно 1:1.55
Все шарниры выполнены в подшипниках, установленных в корпусах, и закрыты крышками с уплотнениями от пыли.
Конечные положения исполнительного органа манипулятора ограничиваются упорами 20 и 21, на которые опирается первое звено 2, В вытянутом положении первое звено 2 упирается в упор 20, установленный а стяжке, соединяющей корпуса основного и до- полнительного приводов. Во втянутом положении первое звено 2 упирается в упор 21, установленный на боковой внутренней стенке редуктора основного привода.
Манипулятор работает следуккцим образом.
При включении двигателя основного привода 7 звено 2 поворачивается на угол О - 90 относительно горизонта-; льной оси. Звено 3 поворачивается на двойной угол относительно звена 2, а шарнир 14, соединяющий звено 3 и звено 4, совершает движение по прямой линии, так как дпины звеньев 2 и 3 одинаковы.
При включении двигателя дополнительного привода 8 звено 4 посредством кривошипно-шатунного механизма и двух параллелограммных механизмов 18 и 19 поворачивается на угол 0-45 соответственно, а конец звена 4 - шарнир 15, соединяющий звенья 4 и 5, будет совершать подъем или опускание находясь постоянно в горизонтальном положении.
Формула изобретения
Манипулятор, содержащий основание, шарнирно соединенные звенья, первое из которых связано с основанием, а последнее - с захватным устройством, и основной привод его перемещения,. имеющий двигатель, установленный на основании, и последовательно соединенные цепные передачи, звездочки которых установлены на осях шарниров, связывающих звенья, при этом ведущая звездочка первой цепной передачи кинематически связана с двигателем, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения двух прямолинейных движений захватного устройства во взаимно перпендикулярных плоскостях, он снабжен дополните льным приводом перемещения захватного устройства, выполненным в виде двигателя, установленного на основа31454684
НИИ, и последовательно соединенныхна шарнирах звеньев манипулятора, и
параллелоГраниных механизмов, проти- первый из них кинематически связан с воположные рычаги которых закреплены выходным валом двигателя.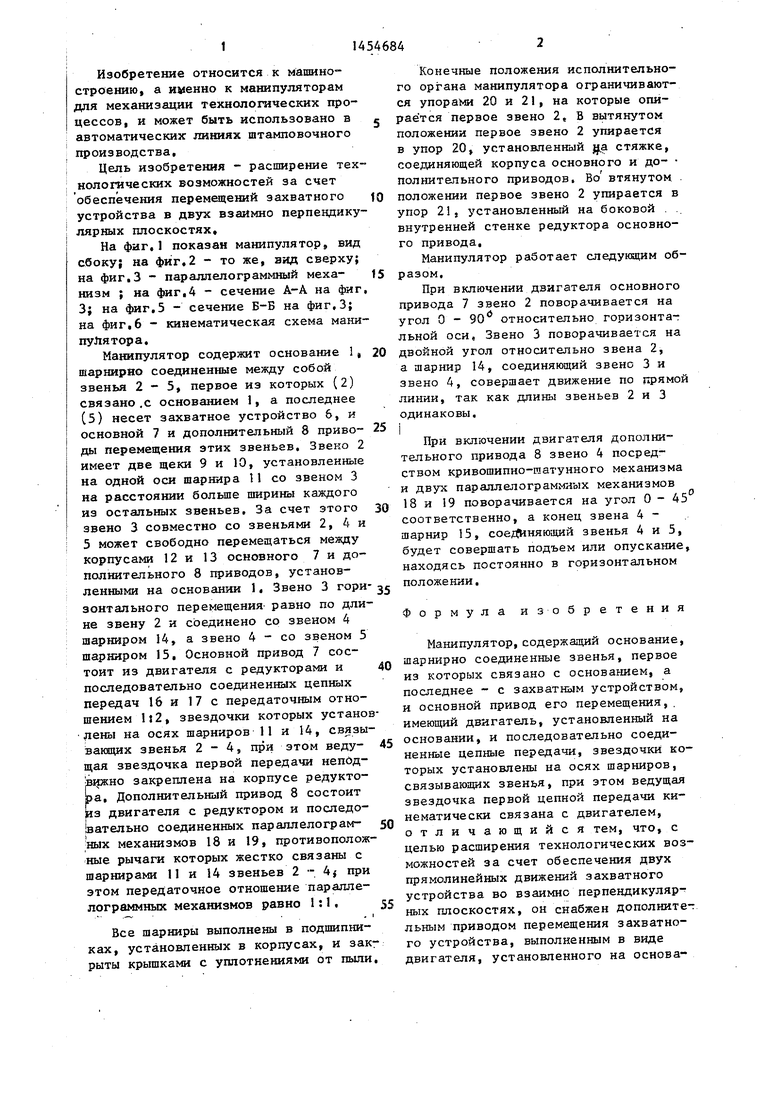
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU908589A1 |
| Манипулятор | 1979 |
|
SU814722A2 |
| Автоматизированная линия для штамповки деталей из листового материала | 1987 |
|
SU1505639A1 |
| Манипулятор | 1980 |
|
SU963848A1 |
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| Манипулятор | 1978 |
|
SU779065A1 |
| Манипулятор | 1978 |
|
SU685614A1 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Манипулятор | 1987 |
|
SU1517252A1 |

Изобретение относится к машиностроению, а именно к манипуляторам для механизации технологических процессов, и может быть использовано в автоматических линиях штамповочного производства. Цель изобретения - расширение технологических возможностей за счет обеспечения двух прямолинейных движений захватного устройства во взаимно перпендикулярных плоскостях. Для зтого противоположные рычаги последовательно соединенных парал- лелограммных механизмов жестко связаны с шарнирами 11 и 14 звеньев манипулятора, а рычаг первого па- рал л ело граммно го механизма кинематически связан с двигателем дополните льного привода, 6 ил.
фиг. 2
фиг.з
А-А
фш,
фиг. 5
8
OCHaf-nsb-iV
O
| Манипулятор | 1977 |
|
SU659376A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
