ss/r////////////
Фиг
нирно соединенный с малыми смежными звеньями 9 и 10 параллелограммного механизма также перемещается по направляющим корпуса, что приводит к перемещению захватного устройства 12, шарнирно соединенного с выходным звеном 11 параллелограммного механизма стрелы. Перемещение ползунов 5, 8, шатуна 6 и звеньев 7, 9, 10 и 11 приводит к нарушению равновесия системы относительно оси шарнира В, в результате чего корпус 1 поворачивается и включается один из выключателей 22, смонтированных на платформе 19 и электрически связанных с системой управления, По сигналу системы управления включается второй привод, установленный на ползуне 5 и кинематически связанный с противовесом 16. Перемещаясь, противовес 16 восстанавливает равновесие системы. 1 з.п.ф-лы, 3 ил.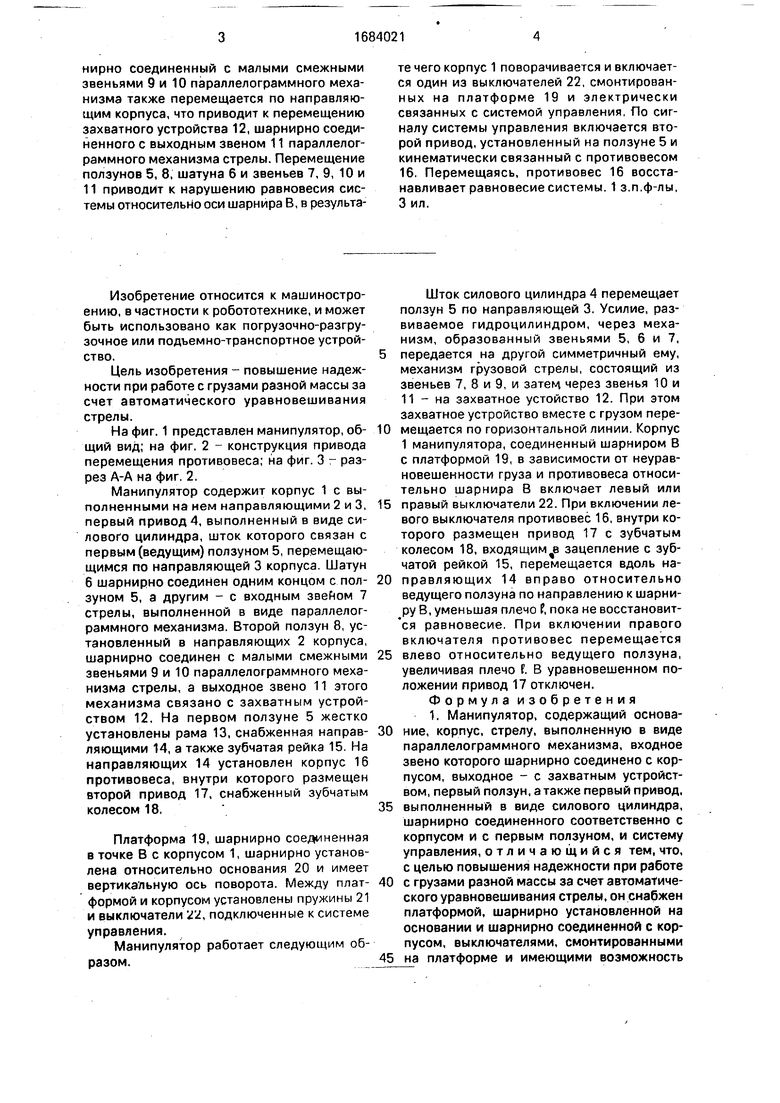
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1465298A1 |
| Грузоподъемное устройство | 1984 |
|
SU1230985A1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Манипулятор | 1984 |
|
SU1197832A1 |
| Вилы погрузчика | 1986 |
|
SU1390181A1 |
| Устройство для замены шпал | 1987 |
|
SU1576611A1 |
| Сбалансированный манипулятор | 1987 |
|
SU1468739A1 |
| Грузоподъемный кран для многоярусной установки груза | 1983 |
|
SU1177261A1 |
| Манипулятор | 1987 |
|
SU1430258A1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано как погрузочно-рззгрузочное или подъемно-транспортное устройство. Цель изобретения - повышение надежности при работе с грузами разного веса за счет автоматического уравновешивания стрелы. На основании 20 шарнирно установлена платформа 19 и шарнирно связанный с ней корпус 1, на котором смонтирована стрела, выполненная в виде параллелограммного механизма. Для выполнения работы по сигналу системы упраа- ления включается первый привод 4, выполненный в виде силового цилиндра и шарнирно соединенный соответственно с корпусом и с первым ползуном 5. При этом ползун 5 перемещается по направляющим корпуса, а входное звено 7 параллелограммного механизма стрелы поворачивается с помощью шатуна 6. Второй ползун 8, шар
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано как погруэочно-разгру- зочное или подъемно-транспортное устройство.
Цель изобретения - повышение надежности при работе с грузами разной массы за счет автоматического уравновешивания стрелы.
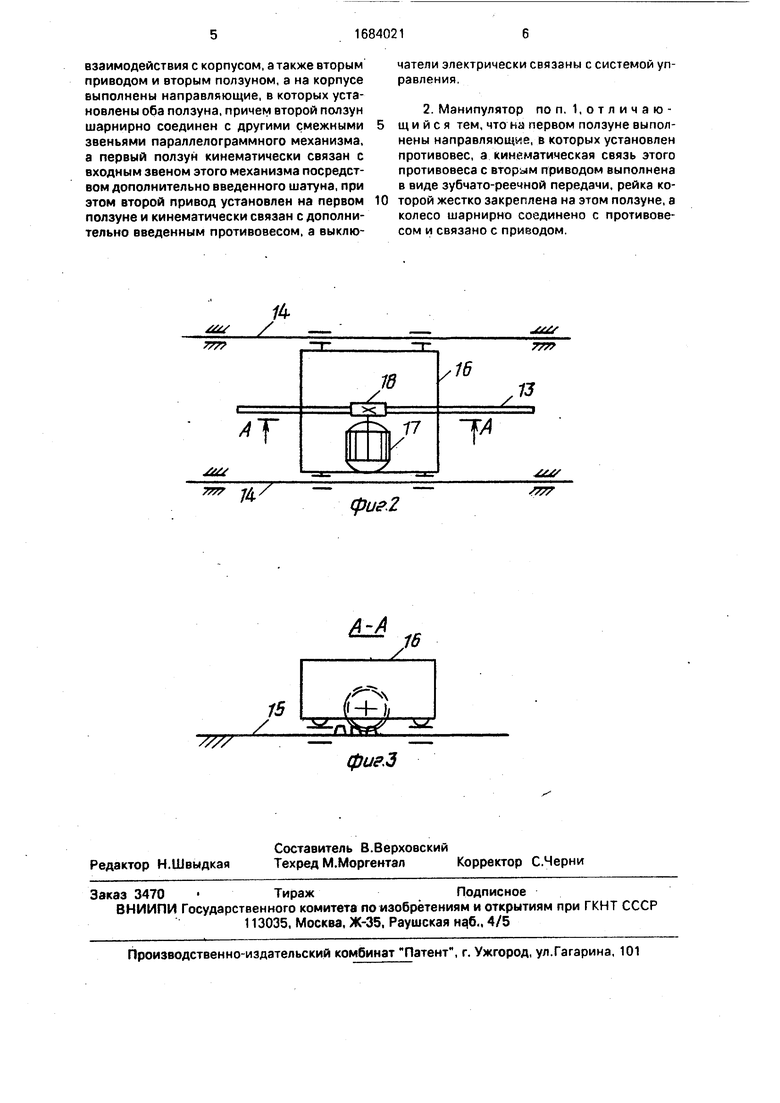
На фиг. 1 представлен манипулятор, общий вид; на фиг. 2 - конструкция привода перемещения противовеса; на фиг. 3 - разрез А-А на фиг. 2.
Манипулятор содержит корпус 1 с выполненными на нем направляющими 2 и 3, первый привод 4, выполненный в виде силового цилиндра, шток которого связан с первым (ведущим) ползуном 5, перемещающимся по направляющей 3 корпуса Шатун 6 шарнирно соединен одним концом с ползуном 5, а другим - с входным звеном 7 стрелы, выполненной в виде параллелограммного механизма. Второй ползун 8, установленный в направляющих 2 корпуса, шарнирно соединен с малыми смежными звеньями 9 и 10 параллелограммного механизма стрелы, а выходное звено 11 этого механизма связано с захватным устройством 12. На первом ползуне 5 жестко установлены рама 13, снабженная направляющими 14, а также зубчатая рейка 15. На направляющих 14 установлен корпус 16 противовеса, внутри которого размещен второй привод 17, снабженный зубчатым колесом 18,
Платформа 19, шарнирно соединенная в точке В с корпусом 1, шарнирно установлена относительно основания 20 и имеет вертикальную ось поворота. Между платформой и корпусом установлены пружины 21 и выключатели i L, подключенные к системе управления.
Манипулятор работает следующим образом.
Шток силового цилиндра 4 перемещает ползун 5 по направляющей 3. Усилие, развиваемое гидроцилиндром, через механизм, образованный звеньями 5, 6 и 7,
передается на другой симметричный ему, механизм грузовой стрелы, состоящий из звеньев 7, 8 и 9, и затеи через звенья 10 и 11 - на захватное устойство 12. При этом захватное устройство вместе с грузом перемещается по горизонтальной линии. Корпус 1 манипулятора, соединенный шарниром В с платформой 19, в зависимости от неуравновешенности груза и противовеса относительно шарнира В включает левый или
правый выключатели 22. При включении левого выключателя противовес 16, внутри которого размещен привод 17 с зубчатым колесом 18, входящим в зацепление с зубчатой рейкой 15, перемещается вдоль направляющих 14 вправо относительно ведущего ползуна по направлению к шарниру В, уменьшая плечо Р, пока не восстановит- ся равновесие. При включении правого включателя противовес перемещается
влево относительно ведущего ползуна, увеличивая плечо f. В уравновешенном положении привод 17 отключен.
Формула изобретения
выполненный в виде силового цилиндра, шаркирно соединенного соответственно с корпусом и с первым ползуном, и систему управления, отличающийся тем, что, с целью повышения надежности при работе
с грузами разной массы за счет автоматического уравновешивания стрелы, он снабжен платформой, шарнирно установленной на основании и шарнирно соединенной с корпусом, выключателями, смонтированными
на платформе и имеющими возможность
взаимодействия с корпусом, а также вторым приводом и вторым ползуном, а на корпусе выполнены направляющие, в которых установлены оба ползуна, причем второй ползун шэрнирно соединен с другими смежными звеньями параллелограммного механизма, а первый ползун кинематически связан с входным звеном этого механизма посредством дополнительно введенного шатуна, при этом второй привод установлен на первом ползуне и кинематически связан с дополнительно введенным противовесом, а выклю6 А
/L
15
i±l
//7/
фие.З
чатели электрически связаны с системой управления.
/
16
| Манипулятор | 1979 |
|
SU795934A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
