(21) 4098225/40-11 (22) 23.07.86 (46) 07.09.88. Бюл. № 33 (72) А.Я.Макаруша
(53)621.873.875 (088.8)
(56)Авторское свидетельство СССР № 1158481, кл. В 66 С 23/88, 1983.
(54)ПОДЬЕШО-ТРАНСПОРТНОЕ УСТРОЙСТВО
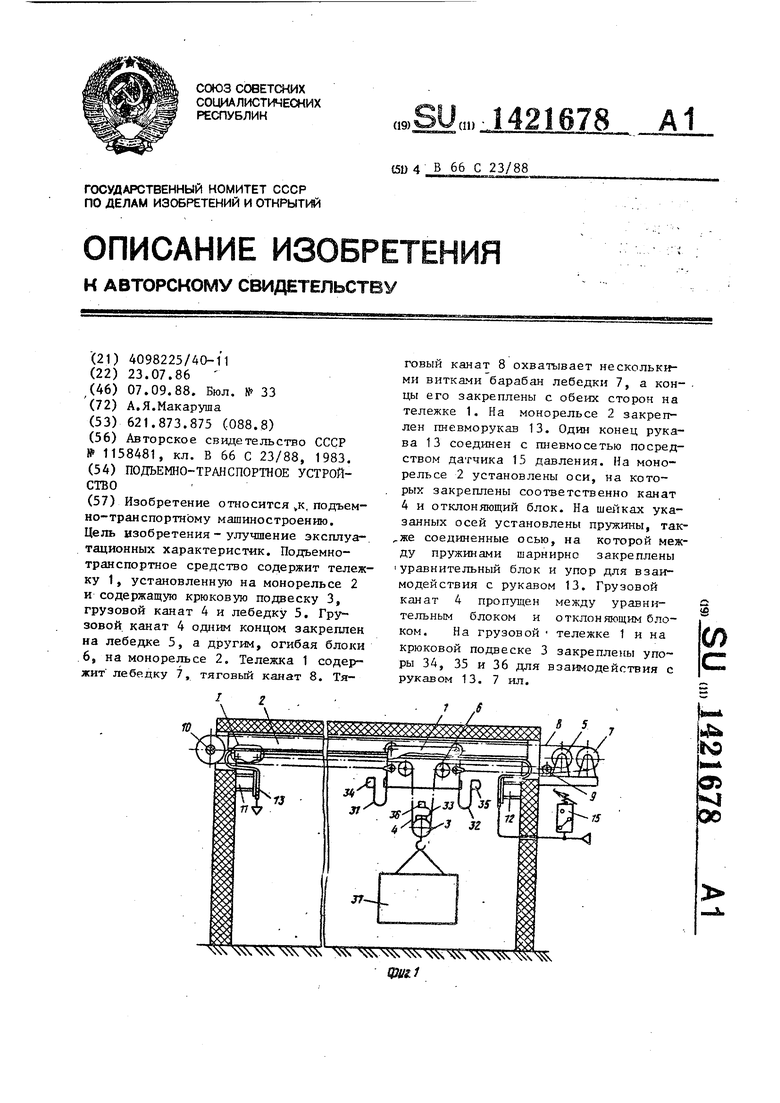
(57)Изобретение относится к, подъемно-транспортному машиностроению. Цель изобретения - улучшение эксплуа-. тационных характеристик. Подъемно- транспортное средство содержит тележку 1, установленную на монорельсе 2
и содержащую крюковую подвеску 3, грузовой канат 4 и лебедку 5. Грузовой канат 4 одним концом закреплен на лебедке 5, а другим, огибая блоки 6, на монорельсе 2. Тележка 1 содержит лебедку 7, тяговый канат 8. Тяговый канат 8 охватывает несколькими витками барабан лебедки 7, а кон- . цы его закреплены с обеих сторон на тележке 1. На монорельсе 2 закреплен пневморукав 13. Один конец рукава 13 соединен с пневмосетью посредством датчика 15 давления. На монорельсе 2 установлены оси, на которых закреплены соответственно канат 4 и отклоняющий блок. На шейках указанных осей установлены пружины, так.же соединенные осью, на которой между пружинами шарнирнс закреплены
уравнительный блок и упор для взаимодействия с рукавом 13. Грузовой канат 4 пропущен между уравнительным блоком и отклоняющим блоком. На грузовой тележке 1 и на крюковой подвеске 3 закреплены упоры 34, 35 и 36 для взаимодействия с рукавом 13. 7 ил.
В
(Л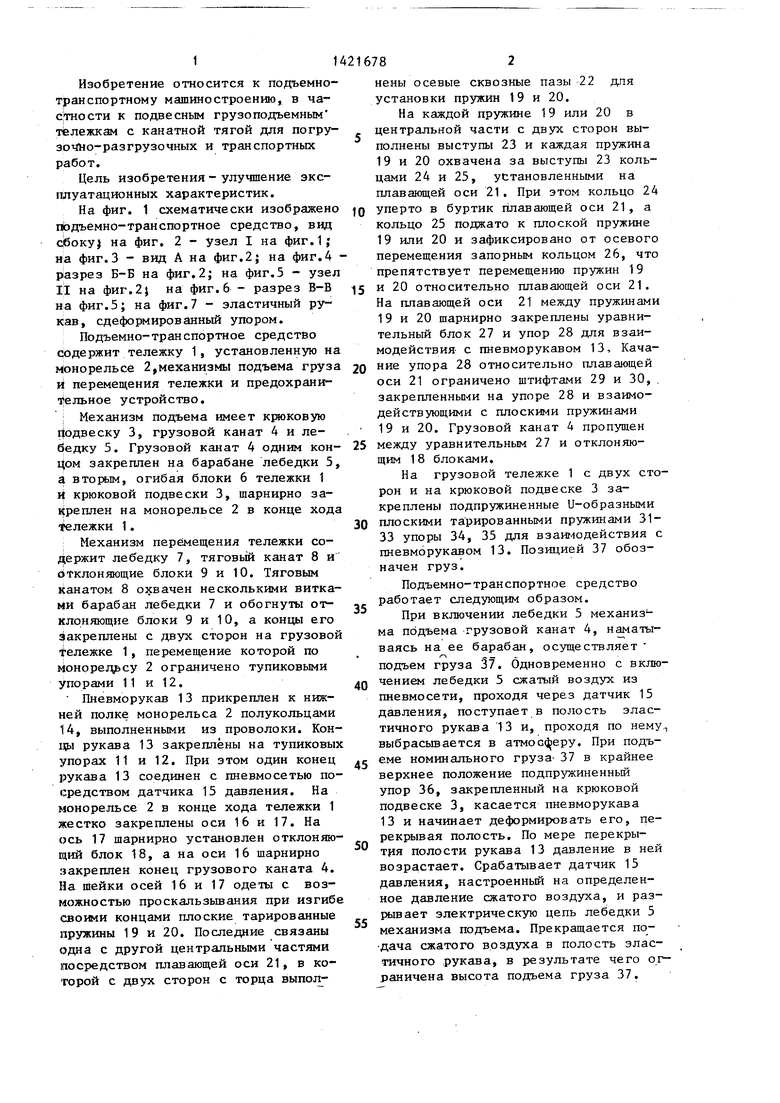
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАХТНЫЙ ТЕЛЬФЕР | 1995 |
|
RU2076211C1 |
| ПОДВЕСКА ГРУЗОВОЙ СТРЕЛЫ | 2010 |
|
RU2447009C1 |
| Строительное грузоподъемное устройство | 1984 |
|
SU1312048A1 |
| Кран для подъема грузов через оконные проемы зданий | 1981 |
|
SU1000378A1 |
| ГРУЗОВАЯ ПОДВЕСКА КРАНОВОЙ СТРЕЛЫ | 1990 |
|
RU2006447C1 |
| Погрузочно-разгрузочное устройство | 1990 |
|
SU1787927A1 |
| Кран для подъема строительных грузов | 1991 |
|
SU1799847A1 |
| Устройство для подъема тяжеловесных крупногабаритных грузов | 1990 |
|
SU1791350A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| Монтажная тележка | 1980 |
|
SU1024410A1 |

V4 VC4 V ХЧ N NsNr4 4 5v
to
0 -vi
СХ5
Изобретение относится к подъемно- транспортному машиностроению, в ча- С;тности к подвесным грузоподъемным тележкам с канатной тягой для погру- 3O ftio разгрузочных и транспортных работ.
Цель изобретения - улучшение эксплуатационных характеристик.
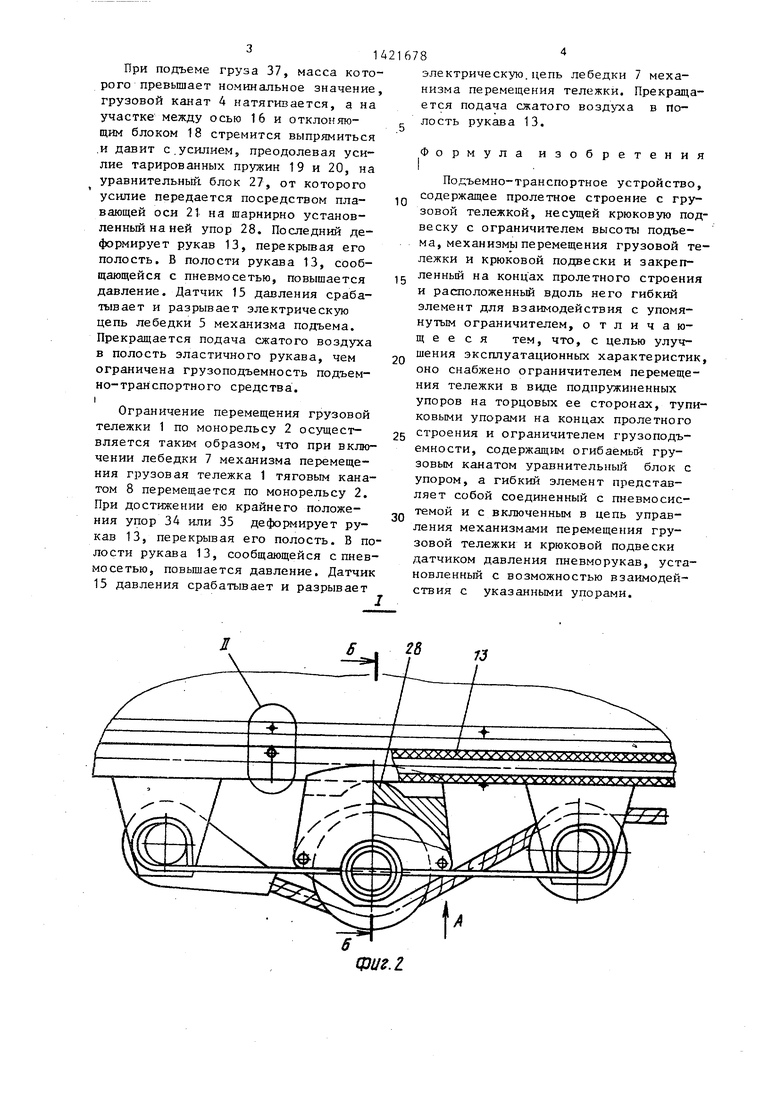
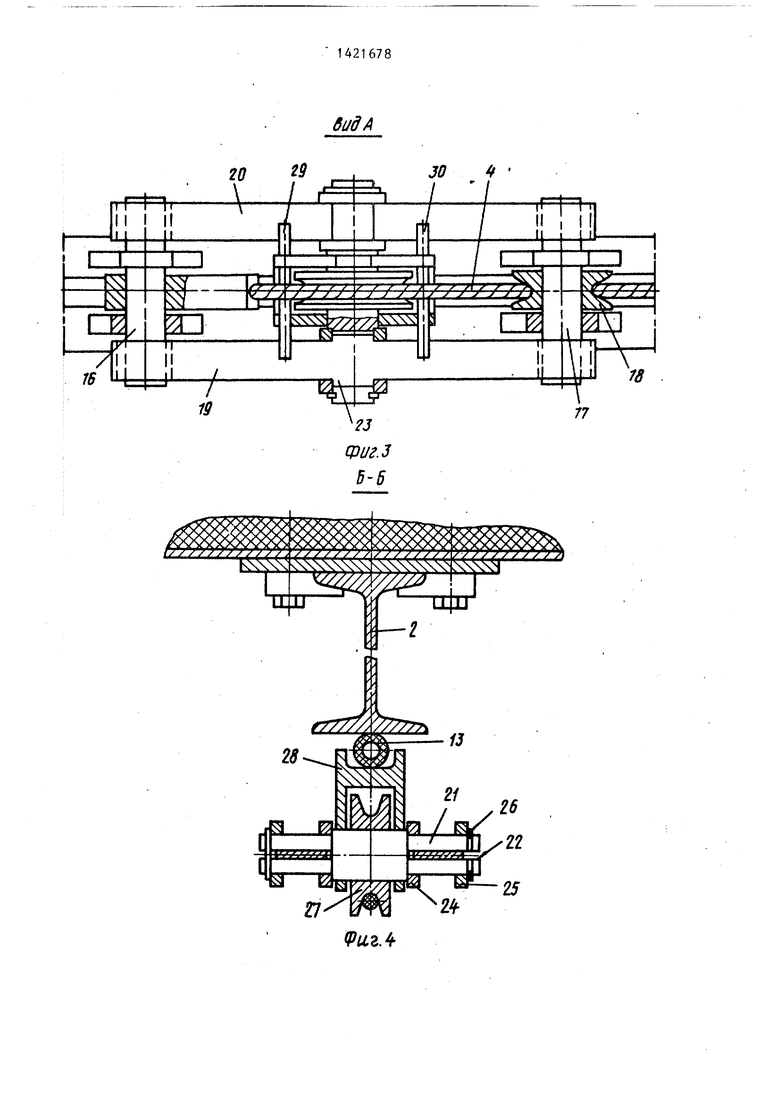
На фиг. 1 схематически изображено подъемно-транспортное средство, вид сёоку} на фиг. 2 - узел I на фиг.1; на фиг.З - вид А на фиг.2; на фиг.4 р азрез Б-Б на фиг.2; на фиг.З - узел II на фиг.2} на фиг.6 - разрез В-В на фиг.З; на фиг.7 - эластичный рукав, сдеформированный упором.
Подъемно-транспортное средство содержит тележку 1, установленную на монорельсе 2,механизмы подъема груза и перемещения тележки и предохранительное устройство.
Механизм подъема имеет К1Ж)ковую йодвеску 3, грузовой канат 4 и лебедку 3. Грузовой канат 4 одним концом закреплен на барабане лебедки 5, а вторым, огибая блоки 6 тележки 1 и крюковой подвески 3, шарнирно закреплен на монорельсе 2 в конце хода «лежки 1.
Механизм перемещения тележки со- 1 ержит лебедку 7, тяговьй канат 8 и отклоняющие блоки 9 и 10. Тяговым канатом 8 охвачен несколькими витками барабан лебедки 7 и обогнуты отклоняющие блоки 9 и 10, а концы его закреплены с двух сторон на грузовой Дележке 1 , перемещение которой по моноредрсу 2 ограничено тупиковыми упорами 11 и 12.
Пневморукав 13 прикреплен к нижней полке монорельса 2 полукольцами 14, выполненными из проволоки. Кон- 19 рукава 13 закреплены на тупиковых упорах 11 и 12. При этом один конец рукава 13 соединен с пневмосетью посредством датчика 13 давления. На монорельсе 2 в конце хода тележки 1 жестко закреплены оси 16 и 17. На ось 17 шарнирно установлен отклоняющий блок 18, а на оси 16 шарнирно закреплен конец грузового каната 4. На шейки осей 16 и 17 одеты с возможностью проскальзьшания при изгибе своими концами плоские тарированные пружины 19 и 20. Последние связаны одна с другой центральными частями Посредством плавающей оси 21, в которой с двух сторон с торца выпол14216782
нены осевые сквозные пазы 22 для установки пружин 19 и 20.
На каждой пружине 19 или 20 в , центральной части с двух сторон выполнены выступы 23 и каждая пружина 19 и 20 охвачена за выступы 23 кольцами 24 и 23, установленными на плавающей оси 21. При этом кольцо 24
JO уперто в буртик плавающей оси 21, а кольцо 23 поджато к плоской пружине 19 или 20 и зафиксировано от осевого перемещения запорным кольцом 26, что препятствует перемещению пружин 19
5 и 20 относительно плавающей оси 21. На плавающей оси 21 между пружинами 19 и 20 шарнирно закреплены уравнительный блок 27 и упор 28 для взаимодействия с пневморукавом 13, Кача20 ние упора 28 относительно плавающей оси 21 ограничено штифтами 29 и 30,. закрепленньми на упоре 28 и взаимодействующими с плоскими пружинами 19 и 20. Грузовой канат 4 пропушен
25 между уравнительным 27 и отклоняющим 18 блоками.
На грузовой тележке 1 с двух сторон и на крюковой подвеске 3 закреплены подпружиненные U-образными
30 плоскими тарированными пружинами 31- 33 упоры 34, 33 для взаиг.юдействия с пневморукавом 13. Позицией 37 обозначен груз.
Подъемно-транспортное средство работает следующим образом.
При включении лебедки 3 механиз - ма подъема грузовой канат 4, наматываясь на ее барабан, осуществляет
.
подъем груза 37. Одновременно с включением лебедки 3 сжатый воздух из
35
40
45
50
55
пневмосети, проходя через датчик 13 давления, поступает в полость эластичного рукава 13 и, проходя по нему, выбрасьшается в атмос еру. При подъеме номинального груза- 37 в крайнее верхнее положение подпружиненный упор 36, закрепленный на крюковой подвеске 3, касается пневморукава 13 и начинает деформирювать его, перекрывая полость. По мере перекрытия полости рукава 13 давление в ней возра,стает. Срабатывает датчик 13 давления, настроенньш на определенное давление сжатого воздуха, и разрывает электрическую цепь лебедки 3 механизма подъема. Прекращается по- дача сжатого воздуха в полость эластичного рукава, в результате чего ограничена высота подъема груза 37.
подъем груза 37. Одновременно с включением лебедки 3 сжатый воздух из
0
5
0
5
пневмосети, проходя через датчик 13 давления, поступает в полость эластичного рукава 13 и, проходя по нему, выбрасьшается в атмос еру. При подъеме номинального груза- 37 в крайнее верхнее положение подпружиненный упор 36, закрепленный на крюковой подвеске 3, касается пневморукава 13 и начинает деформирювать его, перекрывая полость. По мере перекрытия полости рукава 13 давление в ней возра,стает. Срабатывает датчик 13 давления, настроенньш на определенное давление сжатого воздуха, и разрывает электрическую цепь лебедки 3 механизма подъема. Прекращается по- дача сжатого воздуха в полость эластичного рукава, в результате чего ограничена высота подъема груза 37.
При подъеме груза 37, масса которого превышает номинальное значение грузовой канат 4 натягивается, а на участке между осью 16 и отклоняющим блоком 18 стремится выпрямиться .и давит с,усилием, преодолевая усилие тарированных пружин 19 и 20, на уравнительный блок 27, от которого усилие передается посредством плавающей оси 21 на шарнирно установленный на ней упор 28. Последний деформирует рукав 13, перекрьтая его полость. В полости рукава 13, сообщающейся с пневмосетью, повышается давление. Датчик 15 давления срабатывает и разрывает электрическую цепь лебедки 5 механизма подъема. Прекращается подача сжатого воздуха в полость эластичного рукава, чем ограничена грузоподъемность подъемно-транспортного средства. I
Ограничение перемещения грузовой
тележки 1 по монорельсу 2 осуществляется таким образом, что при включении лебедки 7 механизма перемещения грузовая тележка 1 тяговым канатом 8 перемещается по монорельсу 2. При достижении ею крайнего положения упор 34 или 35 деформирует рукав 13, перекрывая его полость. В полости рукава 13, сообщающейся спневмосетью, повышается давление. Датчик 15 давления срабатывает и разрывает
5
0
5
0
электрическую.цепь лебедки 7 механизма перемещения тележки. Прекращается подача сжатого воздуха в полость рукава 13.
Формула изобретения
Подъемно-транспортное устройство, содержащее пролетное строение с грузовой тележкой, несущей крюковую подвеску с ограничителем высоты подъема, механизмы перемещения грузовой тележки и крюковой подвески и закрепленный на конц ах пролетного строения и расположенный вдоль него гибкий элемент для взаимодействия с упомянутым ограничителем, о т л и ч а ю- щ е е с я тем, что, с целью улучшения эксплуатационных характеристик, оно снабжено ограничителем перемещения тележки в виде подпружиненных упоров на торцовых ее сторонах, тупиковыми упорами на концах пролетного строения и ограничителем грузоподъемности, содержащим огибаемый грузовым канатом уравнительный блок с упором, а гибкий элемент представляет собой соединенный с пневмосис- темой и с включенным в цепь управления механизмами перемещения грузовой тележки и крюковой подвески датчиком давления пневморукав, установленный с возможностью взаимодействия с указанными упорами.
13
фиг. г
бидА
20 9
игЛ
JO
Л
Iffв
9 иг. 5
В В
Риг.6
15
