Изобретение относится к машиностроению и может быть использовано в .различных устройствах для преобразования возвратно-поступательного движения привода в колебательное движение исполнительного звена.
Цель изобретения - расшире.ние кинематических возможностей механизма путем обеспечения частоты колеба- тельного перемещения ведомого звена, вдвое большей частоты возвратно- поступательного перемещения привода.
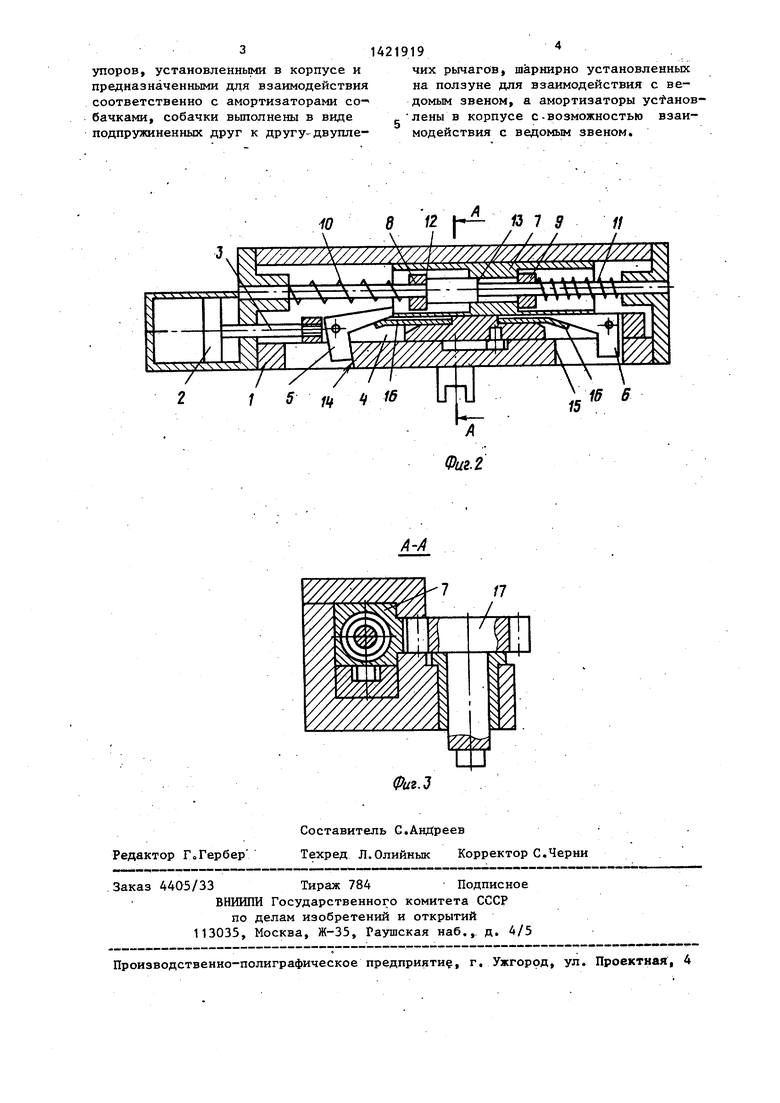
На фиго1 изображена принципиальная схема механизма преобразования воз.вратно-поступательного движения в колебательное; на фиг«2 - один из вариантов конструктивного выполнения механизма; на фиг.З - разрез А-А на фиг,2.
Механизм преобразования возвратно поступательного движения в колебательное содержит корпус 1 и размещенный в корпусе привод возвратно-поступательного перемещения, выполнен- ный, например, в виде пневмоцилиндра 2 со штоком. 3..К штоку 3 пневмоди- линдра 2 жестко подсоединен ползун,4 на котором шарнирно закреплены собачки 5 и 6, выполненные в виде двуплечих рычагов В корпусе 1 размещено ведомое звено, вьшолненное в виде зубчатой рейки 7, амортизаторы 8 и 9, подпружиненные пружинами 10 и. 11 и две пары упоров 12 - 15. Упоры 12 и 13 взаимодействуют с амортизатора- .ми 8 и 9, а упоры 14 и 15 с собачками 5 и 6о Собачки 5 и 6 могут поворачиваться относительно ползуна 4 при набегании их на упоры 14 и 15, а также под действием стягиваннцей их пружины 16. Зубчатая рейка находится в зацеплении с исполнительным звеном вьшолненным в виде зубчатого колеса 17.
Механизм преобразования возвратно-поступательного движения в колебательное работает следукяцим образом
Перемещением ползуна 4 в одно из крайних положений механизма преобразования возвратно-поступательного движения в колебательное приводится в исходное положение, при котором одна из собачек, например 5, заскакивает за торец зубчатой рейки 7. Сама же рейка 7 занимает положение между амортизаторами 8 и 9, поджатыми к упорам 12 и 13 корпуса 1. При перемене направления перемещения пол
зуна 4 собачка 5 упирается в торец рейки 7 и, преодолевая сопротивление пружины 11, перемещает рейку 7 слева направо вслед за перемещением ползуна 4. Происходит поворот зубчатого колеса 17 против направления движения часовой стрелки. В конце зтого перемещения собачка 5 набегает на упор 14 и, поворачиваясь, освобождает рейку 7. Под действием пружины 11 рейка
7перемещается вдоль подзуна 4 и возвращает исполнительное звено - зубчатое колесо 17 в исходное положение. Энергия удара гасится амортизатором
8с пружиной 10. К моменту соприкос- новения рейки 7 амортизатором 8 со- ; бачка 6 освобождается и под действием пружины 16 заскакивает за торец рейки 7.
При очередной перемене направления перемещения ползуна 4 собачка 6 преодолевает сопротивление пружины 10 и перемещает рейку 7 справа налево . Происходит поворот зубчатого колеса 17 в направлении движения часовой стрелки. После набегания собачки. 6 на упор 15 происходит очередной возврат рейки 7 в исходное положение. При этом энергия удара гасится амортизатором 9 с пружиной 11.
Таким образом, за один цикл движения ползуна .4 механизма совершаются два цикла движения рейки 7, а следовательно, и зубчатого колеса 17, т.е. их движение осуществляется с частотой вдвое большей, чем частота Возвратно-поступательных перемещений привода. .
Формула изобретения
Механизм преобразования возвратно- поступательного движения в колеба-. тельное, содержащий корпус,- размещенные в корпусе ползун, собачку, ведомое звено, пружину, связанный с ней амортизатор и привод возвратно-поступательного перемещения, отличающийся тем, что, с целью ра:сширения кинематических возможностей путем обеспечения частоты колебательного перемещения ведомого звена, вдвое большей частоты возвратно-поступательного перемещения привода, механизм снабжен второй собача ой,, второй пружиной и связанным с ней вторым амортизатором и двумя парами
упоров, установленньми в корпусе и предназначенными для взаимодействия соответственно с амортизаторами со- бачками, собачки выполнены в виде подпружиненных друг к другу-двуплечих рычагов, шарнирно установленных на ползуне для взаимодействия с ведомым звеном, а амортизаторы yetанов- g лены в корпусе с-возможностью взаимодействия с ведомым звеном.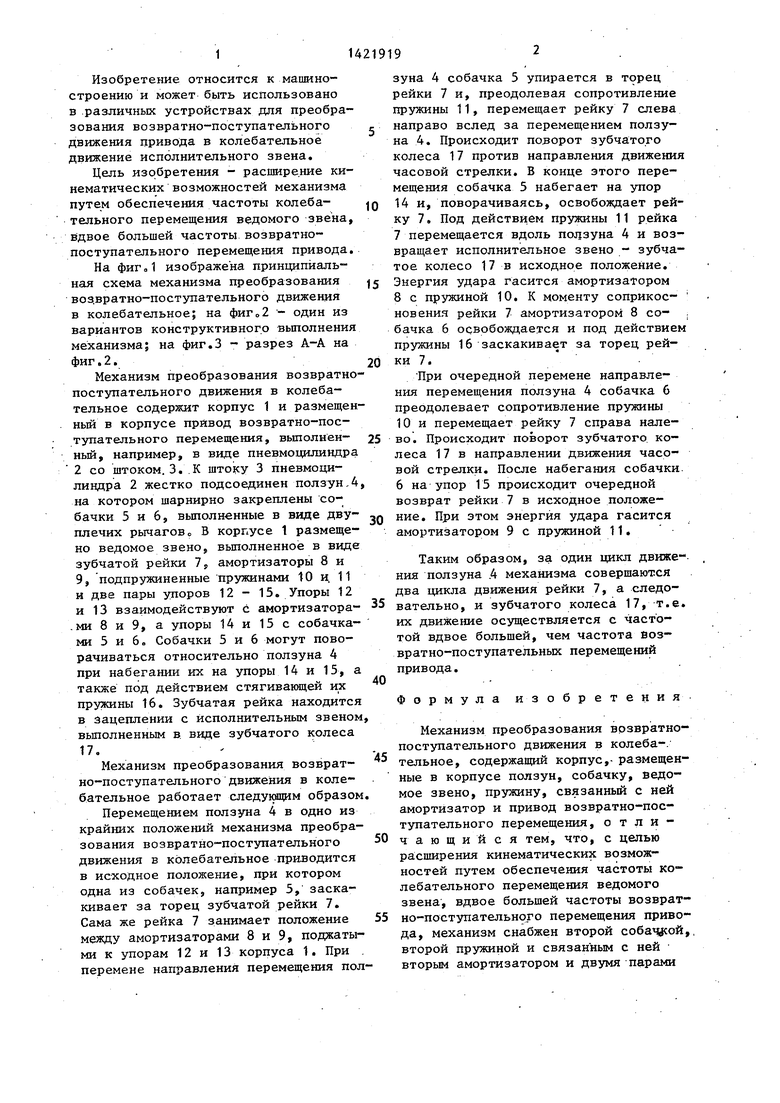
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |
| Механизм для преобразования возвратно-поступательного движения в прерывистое | 1982 |
|
SU1054608A1 |
| Передача прерывистого движения Шлосберга | 1990 |
|
SU1775574A1 |
| УСТАНОВКА ДЛЯ ВЛАГОТЕПЛОВОЙ ОБРАБОТКИ СЫПУЧИХ ПРОДУКТОВ | 2001 |
|
RU2186510C1 |
| Передача для преобразования возвратно-поступательного движения во вращательное с остановками | 1981 |
|
SU958746A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное с выстоями в крайних положениях | 1983 |
|
SU1116247A1 |
| РЕЕЧНАЯ ПЕРЕДАЧА | 2003 |
|
RU2230244C1 |
| Преобразователь возвратно-поступательного движения в однонаправленное вращательное | 2023 |
|
RU2813755C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2001 |
|
RU2223430C2 |
Изобретение относится к машиностроению и может быть использовано в различных устройствах для преобразования возвратно-поступательного движения привода в колебательное движение исполнительного звена. Цель изобретения - расширение кинематических возможностей механизма путем обеспечения частоты колебательного .перемещения ведомого звена, вдвое большей частоты возвратно-поступательного перемещения щривода. Цель 10 8 ......:...-...i-..j изобретения достигается следуюпщм Iобразомо При перемещении ползуна 4 из исходного положения собачка 5, упираясь в торец рейри 7 и преодолевая сопротивление пружины 11, перемещает рейку 7 слева направо вслед за перемещением ползуна 4. Происходит поворот зубчатого колеса 17о В конце перемещения рейки 7 собачка 5 набегает на упор 14 и, поворачиваясь, освобождает рейку 7. Под действием пружины 11 рейка 7 перемещается вдоль ползуна 4 и возвращает зубчатое колесо 1 7 в исходное положение. Энергия удара гасится амортизатором 8. К моменту соприкосновения рейки 7 с амортизатором 8 собачка 6 освобождается и под действием пружины 16 заскакивает за торец рейки 7. При перемене направления перемещения ползуна 4 описанный цикл движения механизма повторяется, только теперь перемещает рейку 7 собачка. Таким образом, при возвратно-поступательном перемещении привода 2 рейка 7 и зубчатое колесо 17 совершают колебательное движение с частотой, вдвое превышакяцей частоту возвратно-поступательного перемещения привода. 3 ило (Л с: 4 to со 8 2 i-..j 7 « ff / ./х /УУу УЬ ХХУ Х ХхУ/ УУ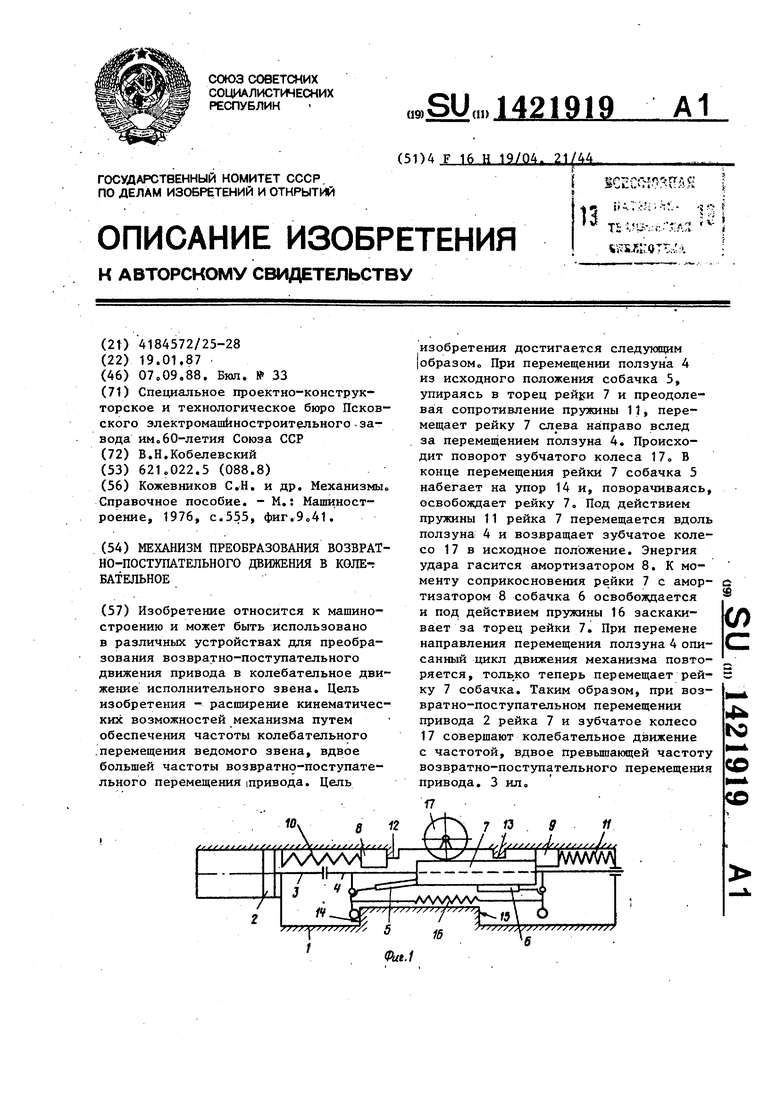
iO
6
2 - 13 1 9 //
/ У / /
Фиг.З
| Кожевников С.Н | |||
| и др | |||
| Механизмы Справочное пособие | |||
| - М.: Машиностроение, 1976, с.555, фиг.9,41. |
