4 Ю ND
Изобретение относится к геодезическому приборостроению, в частности к приборам, предназначенным для измерения расстояний, i Целью изобретения является повышение |1роизводительности за счет уменьшения рлияния инерционности призмы. На фиг. 1 изображена блок-схема электронно-оптического фазового светодально- мера; на фиг. 2 - принципиальная схема блока исключения инерционности призмы; «а фиг. 3 - эпюры напряжений. ; Светодальномер состоит из блока 1 из- мерения и индикации, прямоугольной приз- мы 2 в карданной подвеске 3, уголко- JBoro отражателя 4, блока 5 выработки (сигнала запоминания, блока 6 исключения {инерционности призмы, блока 7 наведения :луча по вертикали, блока 8 наведения луча по горизонтали, блока 9 синхрони- зации, поляризованного силового электро- iмагнита 10 карданного сочленения 11, ме- :ханической оси 12 поворота призмы поля- ризованного силового электромагнита 13, карданного сочленения 14 и механической 1 оси 15 поворота призмы.
Блок 1 измерения и индикации своим оптическим выходом 16 (объективом) направлен на входную грань 17 прямоугольной призмы 2, установленной перед объективом и закрепленной в карданной подвеске 3. Выходная грань 18 прямоугольной призмы оптическим путем соединена с плоскостью 19 уголкового отражателя 4, установленного на измеряемом расстоянии от светодальномера. Блок 1 своим электрическим вь1ходом 20 подсоединен к входу 21 блока 5 выработки сигнала запоминания Выход 22 соединен с входом 23 блока 6 исключения инерционности призмы, а его выход 24 соединен с цифровым входом 25 блока 7 наведения луча по вертикали и одновременно подсоединен к цифровому входу 26 блока 8 наведения луча по горизонтали. При этом блок 9 синхронизации своим первым выходом 27 подсоединен к аналоговому входу 28 блока 7. Выход 29 блока 7 подсоединен к обмотке 30 подвижной катушки поляризованного силового электромагнита 10, которая путем карданного сочленения 11 подсоединена к механической оси 12 поворота призмы 2. Второй выход 31 блока синхронизации подсоединен к аналоговому входу 32 блока 8. Выход 33 блока 8 подсоединен к обмотке 34 подвижной катушки поляризованного силового электромагнита 13, которая путем карданного сочленения 14 подсоединена к механической оси 15 призмы 2.
На фиг. 1 дано графическое изображение плоского 1 оризонтального угла 35, в котором перемеш.ается луч светодальномера при наведении его на уголковый отражатель, .а-..также угла 36, в котором перемешается луч светодальномера при на5
ведении его на уголковый отражатель по вертикали.
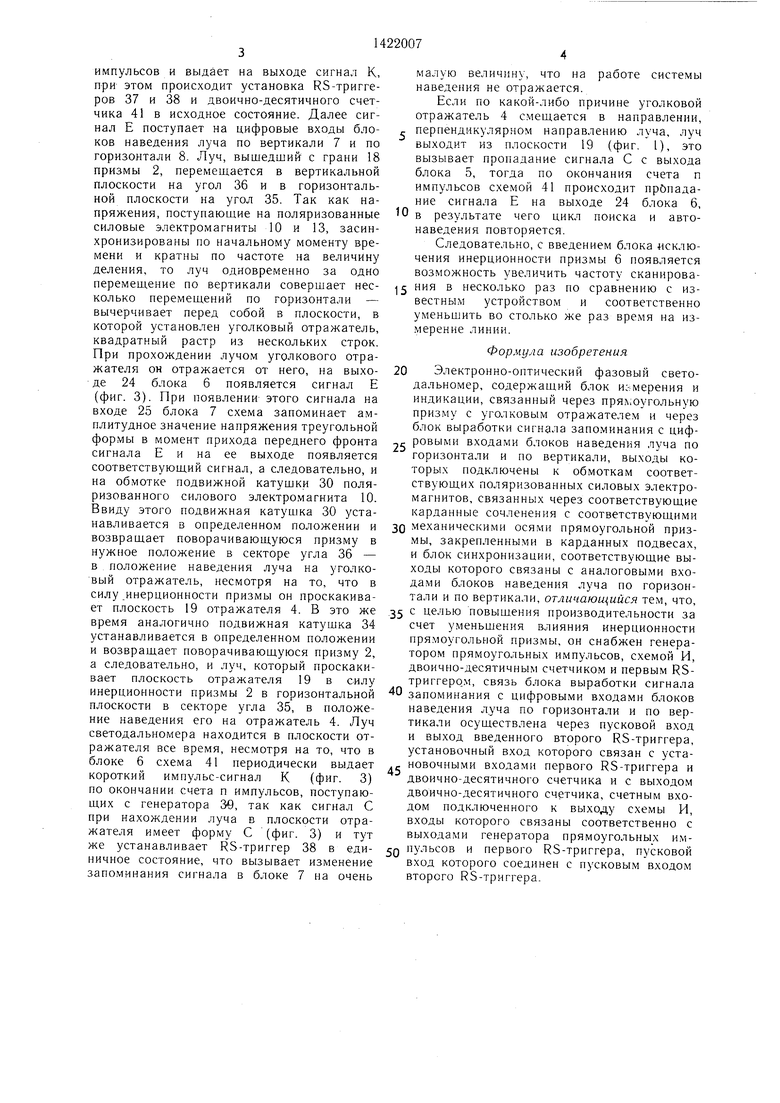
Вход 23 блока 6 является пусковым входом RS-триггеров 37 и 38 одновременно, при этом выход триггера 38 является выходом блока 6. Генератор 39 своим выходом подсоединен к второму входу схемы (U ) 40, одновременно выход схемы 37 подсоединен к, ее первому входу, ее выход подсоединен к счетному входу (С)
0 схемь 41. Выход п схемы 41 подсоединен одновременно к входам установки в исходное состояние (R) схем 37, 38 и 41. Светодальномер работает следующим образом.
„ Излучаемый луч блоком 1 измерения и индикации из объектива 16 поступает на грань 17 прямоугольной призмы 2. Эта призма установлена на карданной подвеске и имеет две степени свободы, может поворачиваться вокруг механических
0 осей одновременно на угол а. Луч, поступивший на вход 17, преломляется на 90° и с выходной грани 18, пройдя измеряемое расстояние, поступает на плоскость 19 уголкового отражателя 4. Отразившись от отражателя, луч обратно тем же путем приходит в объектив 16 и далее - на фотоумножитель блока 1. Там происходит преобразование оптического сигнала в электрический. С анодной нагрузки фотоумножителя через емкость сигнал с выхода 20 блока 1 поступает на вход 21 блока выработки сигнала запоминания. Блок 5 содержит схему выделения модуля сигнала - активный двухполупериодный выпрямитель, собранный на операционных усилителях, на вход которой приходит сигнал с блока 1, поступаюш,ий затем на пороговое устройство, которое выдает сигнал от нулевого уровня до напряжения отсечки, с приходом на нее сигнала схемы выделения модуля она выдает на выход 22 блока 5 сигнал, поступаюш.ий на вход 23 блока 6 исклю0 чения инерционности призмы. При увеличении частоты сканирования лучом в пространстве по вертикали и горизонтали происходит проскакивание лучом плоскости отражателя ввиду инерционности призмы. На основании этого сигнал С появляется на входе блока 6 во время прохождения лучом отражателя. При этом на выходе RS-триггеров 37 и 38 появляются сигналы D и Е. Сигнал D (фиг. 3) поступает на первый вход схемы (U) 40.
Q Одновременно с выхода схемы генератора 39 прямоугольных импульсов непрерывно на второй вход схемы (U) 40 поступает прямоугольный сигнал и с ее выхода сигнал F поступает на счетный вход (С) двоично-десятичного счетчика 41 с коэффи5 циентом счета (п). Сигнал Е на выходе 24 существует до тех пор, пока двоично- десятичный счетчик 41 не сосчитает п
0
5
5
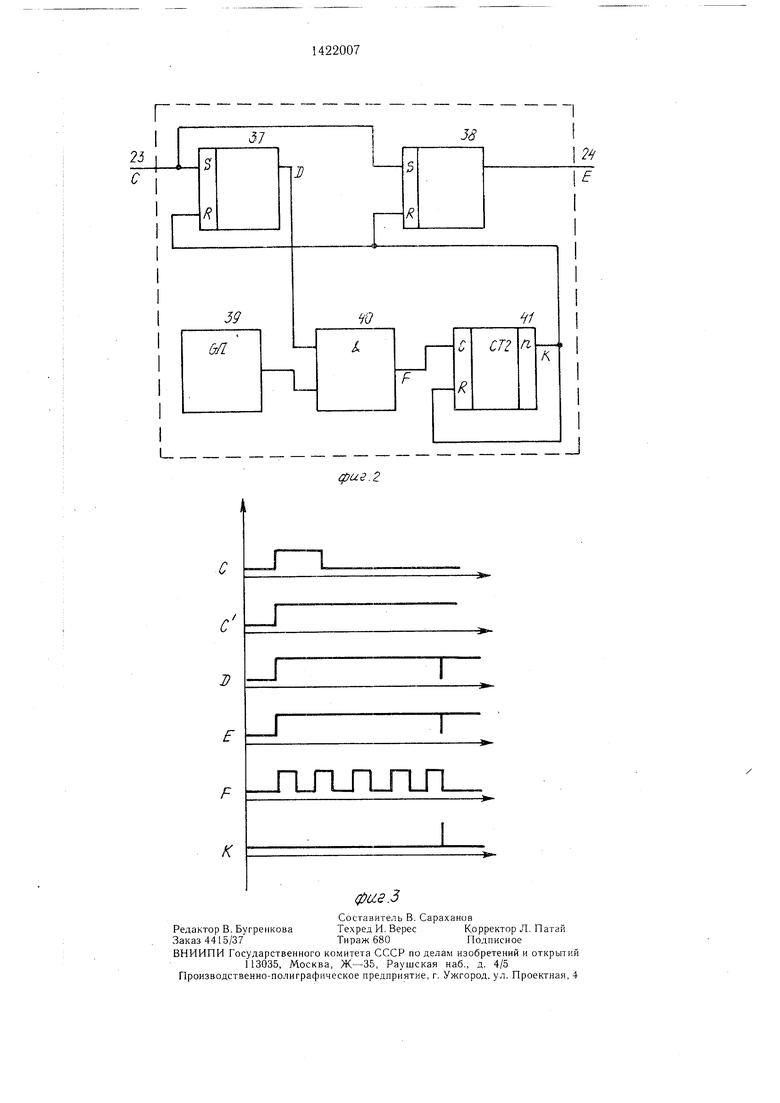
импульсов и выдает на выходе сигнал К, при этом происходит установка RS-тригге- ров 37 и 38 и двоично-десятичного счетчика 41 в исходное состояние. Далее сигнал Е поступает на цифровые входы блоков наведения луча по вертикали 7 и по горизонтали 8. Луч, вышедший с грани 18 призмы 2, перемещается в вертикальной плоскости на угол 36 и в горизонтальной плоскости на угол 35. Так как напряжения, поступающие на поляризованные силовые электромагниты 10 и 13, засин- хронизированы по начальному моменту времени и кратны по частоте на величину деления, то луч одновременно за одно перемещение по вертикали соверщает несколько перемещений по горизонтали - вычерчивает перед собой в плоскости, в которой установлен уголковый отражатель, квадратный растр из нескольких строк. При прохождении лучом уголкового отражателя он отражается от него, на выходе 24 блока 6 появляется сигнал Е (фиг. 3). При появлении этого сигнала на входе 25 блока 7 схема запоминает амплитудное значение напряжения треугольной
малую величину, что на работе системы наведения не отражается.
Если по какой-либо причине уголковой отражатель 4 смещается в направлении,
с- перпендикулярном направлению луча, луч выходит из плоскости 19 (фиг. 1), это вызывает пропадание сигнала С с выхода блока 5, тогда по окончания счета п импульсов схемой 41 происходит припадание сигнала Е на выходе 24 блока 6,
10 в результате чего цикл поиска и авто- наведения повторяется.
Следовательно, с введением блока исключения инерционности призмы б появляется возможность увеличить частоту сканирова 5 ния в несколько раз по сравнению с известным устройством и соответственно уменьшить во столько же раз время на измерение линии.
Формула изобретения
20 Электронно-оптический фазовый свето- дальномер, содержащий блок измерения и индикации, связанный через прял;оугольную призму с уголковым отражателем и через блок выработки сигнала запоминания с цифформы в момент прихода переднего фронта 25 ровыми входами блоков наведения луча по
сигнала Е и на ее выходе появляется соответствующий сигнал, а следовательно, и на обмотке подвижной катущки 30 поляризованного силового электромагнита 10. Ввиду этого подвижная катушка 30 устанавливается в определенном положении и возвращает поворачивающуюся призму в нужное положение в секторе угла 36 - в положение наведения луча на уголковый отражатель, несмотря на то, что в силу .инерционности призмы он проскакивагоризонтали и по вертикали, выходы которых подключены к обмоткам соответствующих поляризованных силовых электромагнитов, связанных через соответствующие карданные сочленения с соответствующими 30 механическими осями прямоугольной призмы, закрепленными в карданных подвесах, и блок синхронизации, соответствующие выходы которого связаны с аналоговыми входами блоков наведения луча по горизонтали и по вертикали, отличающийся тем, что.
ет плоскость 19 отражателя 4. В это же 35 целью повыщення производительности за
счет уменьщения влияния инерционности прямоугольной призмы, он снабжен генератором прямоугольных импульсов, схемой И, двоично-десятичным счетчиком и первым RS- триггеро.м, связь блока выработки сигнала
время аналогично подвижная катущка 34 устанавливается в определенном положении и возвращает поворачивающуюся призму 2, а следовательно, и луч, который проскакивает плоскость отражателя 19 в силу
инерционности призмы 2 в горизонтальной запоминания с цифровыми входами блоков
плоскости в секторе угла 35, в положение наведения его на отражатель 4. Луч светодальномера находится в плоскости отражателя все время, несмотря на то, что в
наведения луча по горизонтали и по вертикали осуществлена через пусковой вход и выход введенного второго RS-триггера, установочный вход которого связан с устаблоке 6 схема 41 периодически выдает .с новочными входами первого RS-триггера и
короткий импульс-сигнал К (фиг. 3) по окончании счета п импульсов, поступающих с генератора 39, так как сигнал С при нахождении луча в плоскости отражателя имеет форму С (фиг. 3) и тут же устанавливает RS-триггер 38 в единичное состояние, что вызывает изменение запоминания сигнала в блоке 7 на очень
двоично-десятичного счетчика и с выходом двоично-десятичного счетчика, счетным входом подключенного к выходу схемы И, входы которого связаны соответственно с выходами генератора прямоугольных и.м- 5Q пульсов и первого RS-триггера, пусковой вход которого соединен с пусковым входом второго RS-триггера.
малую величину, что на работе системы наведения не отражается.
Если по какой-либо причине уголковой отражатель 4 смещается в направлении,
- перпендикулярном направлению луча, луч выходит из плоскости 19 (фиг. 1), это вызывает пропадание сигнала С с выхода блока 5, тогда по окончания счета п импульсов схемой 41 происходит припадание сигнала Е на выходе 24 блока 6,
0 в результате чего цикл поиска и авто- наведения повторяется.
Следовательно, с введением блока исключения инерционности призмы б появляется возможность увеличить частоту сканирова5 ния в несколько раз по сравнению с известным устройством и соответственно уменьшить во столько же раз время на измерение линии.
Формула изобретения
0 Электронно-оптический фазовый свето- дальномер, содержащий блок измерения и индикации, связанный через прял;оугольную призму с уголковым отражателем и через блок выработки сигнала запоминания с циф 25 ровыми входами блоков наведения луча по
горизонтали и по вертикали, выходы которых подключены к обмоткам соответствующих поляризованных силовых электромагнитов, связанных через соответствующие карданные сочленения с соответствующими 30 механическими осями прямоугольной призмы, закрепленными в карданных подвесах, и блок синхронизации, соответствующие выходы которого связаны с аналоговыми входами блоков наведения луча по горизонтали и по вертикали, отличающийся тем, что.
наведения луча по горизонтали и по вертикали осуществлена через пусковой вход и выход введенного второго RS-триггера, установочный вход которого связан с установочными входами первого RS-триггера и
двоично-десятичного счетчика и с выходом двоично-десятичного счетчика, счетным входом подключенного к выходу схемы И, входы которого связаны соответственно с выходами генератора прямоугольных и.м- 5Q пульсов и первого RS-триггера, пусковой вход которого соединен с пусковым входом второго RS-триггера.
Г
п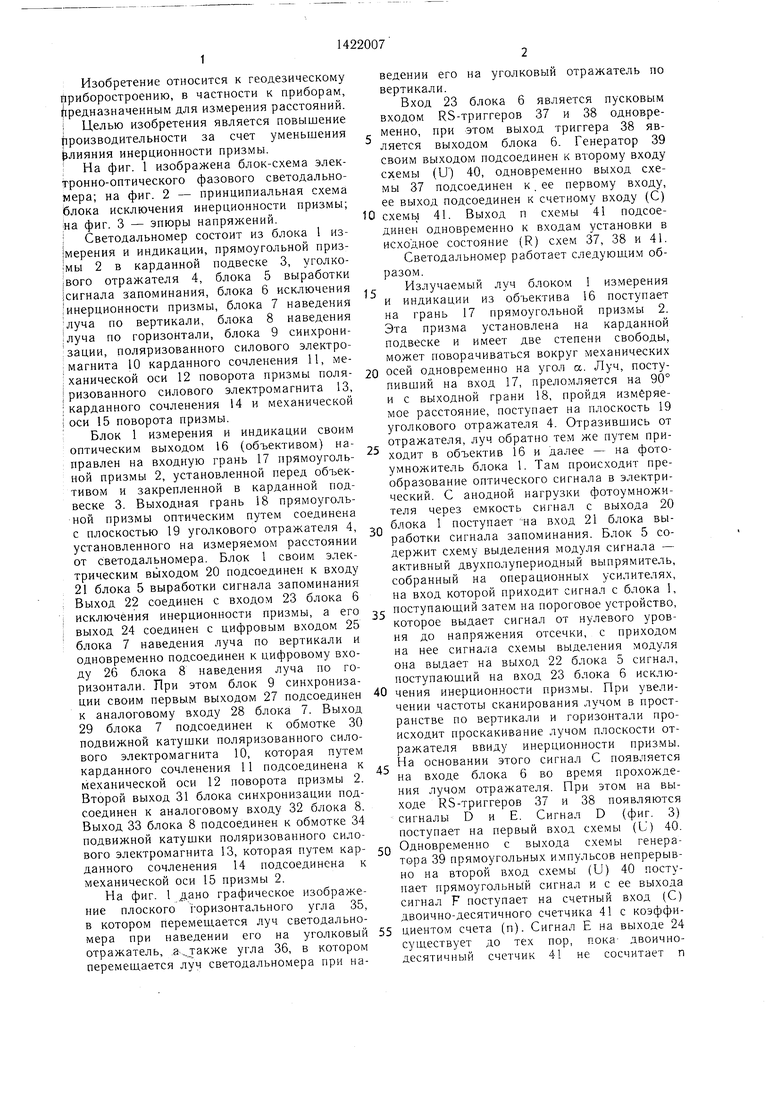
| название | год | авторы | номер документа |
|---|---|---|---|
| Электроннооптический фазовый светодальномер | 1985 |
|
SU1422006A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| Интерферометр типа Майкельсона для измерения перемещений | 1987 |
|
SU1439389A1 |
| Интерферометр для измерения перемещений | 1988 |
|
SU1567869A1 |
| Устройство автоматической сигнализации о приближении поезда к участку путевых работ | 1985 |
|
SU1320108A1 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ МОНИТОРИНГА ГЕОДЕЗИЧЕСКОГО СТВОРА ВЫСОТНЫХ ПЛОТИН ГЭС | 2021 |
|
RU2760505C1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
Устройство относится к геодезическому приборостроению и может использоваться при измерении расстояния между движущимся объектом и стационарным пунктом. на котором устанавливают уголковый отражатель 4. С целью повышения производительности устройство снабжено блоком 6 исключения инерционности прямоугольной призмы 2, механические оси которой 12, 15 подвешены на карданны.х подвесах 3 и связаны через карданные сочленения II, 14 с поляризованными силовыми электромагнитами IO, 13. Блок I измерения и индикации связан с блоком 6 через блок 5, вырабатывающий сигнал запоминания. Выход блока 6 подключен к цифровым входам блоков 7, 8 наведения луча по вертикали и по гхтризонтали, к аналоговы.м входам которых подключены выходы блока 9 синхронизации, а их выходы соединены с обмотками 30, 34 подвижных катушек ио- ляризованных си.ювых электромагнитов 10, 13, управляющих пространственным положением прямоугольной призмы 2. 3 ил. (О со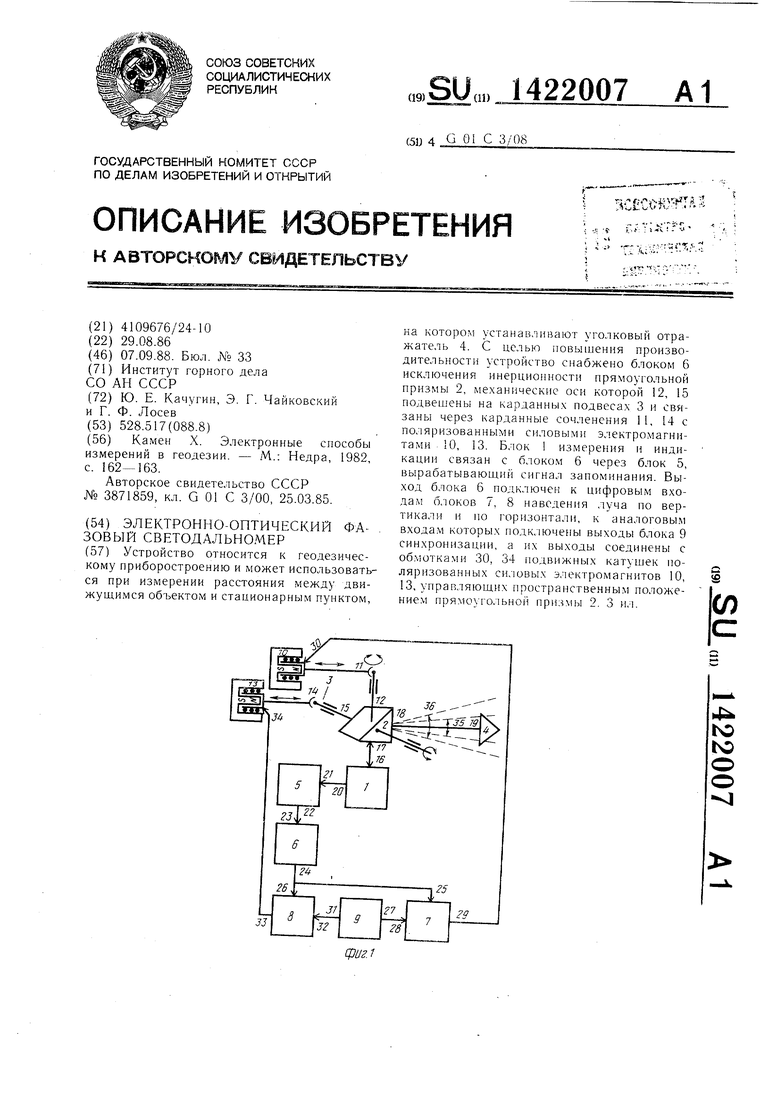
фиг.2
F
Редактор В. Бугренкова Заказ 4415/37
Составитель В. Сараханов Техред И. ВересКорректор Л. Патай
Тираж 680Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фаг.З
| Камеи X | |||
| Электронные способы измерений в геодезии | |||
| - М.: Недра, 1982, с | |||
| Деревянное стыковое скрепление | 1920 |
|
SU162A1 |
| Авторское свидетельство СССР № 3871859, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
