(21) 4188492/25-28
(22)30.01.87
(46) 07.09.88. Бнш. № 33
(71)Научно-исследовательский институт высоких напряже ний при Томском политехническом институте
им. С.М.Кирова
(72)В.В.Литвак, В.В.Шмаков и С.В.Рикконен
(53)620.179 (088.8)
(56)Авторское свидетельство СССР № 913234, кл. G 01 N 29/00, 1980.
(54)УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ. ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛОВ
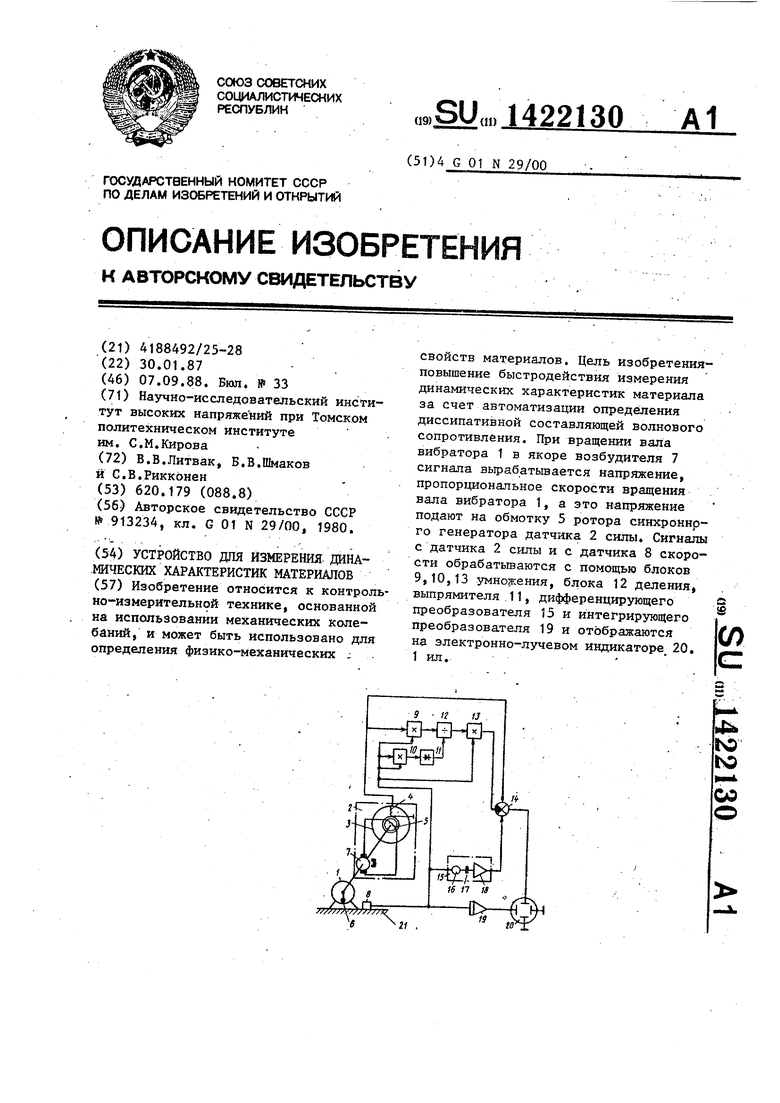
(57)Изобретение относится к контроль- но -измерительной технике, основанной на использовании механических колебаний, и может быть использовано для определения физико-механических ;
свойств материалов. Цель изобретения- повышение быстродействия измерения динамических характеристик материала за счет автоматизации определения диссипативной составляющей волнового сопротивления. При вращении вала вибратора 1 в якоре возбудителя 7 сигнала вырабатьюается напряжение, пропорциональное скорости вращения вала вибратора 1, а это напряжение подают на обмотку 5 ротора синхроннр- го генератора датчика 2 силы. Сигналы с датчика 2 силы и с датчика 8 скорости обрабатываются с помощью блоков 9,10,13 з множения, блока 12 деления, выпрямителя .11, дифференцирующего преобразователя 15 и интегрирующего преобразователя 19 и отображаются на электронно-лучевом индикаторе, 20. 1 ил.
ел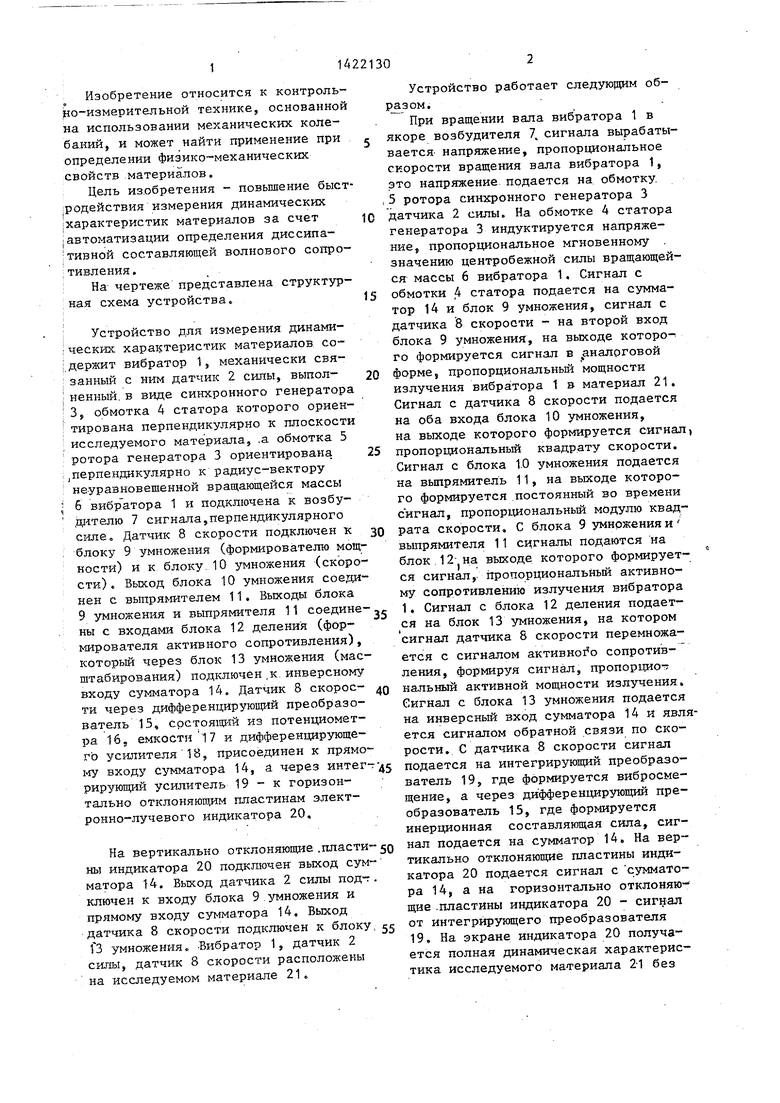
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения динамических характеристик материалов | 1985 |
|
SU1249435A2 |
| Устройство для управления ведомым сетью инвертором | 1988 |
|
SU1603510A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Электропривод | 1979 |
|
SU942230A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Электропривод моталки стана холодной прокатки | 1975 |
|
SU535699A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ЭЛЕКТРИЧЕСКОГО ТОРМОЗА | 2019 |
|
RU2709642C1 |
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2017 |
|
RU2653351C1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1986 |
|
SU1377343A2 |
э Is:)
00
Изобретение относится к коктроль- ро-измерительной технике, основанной на использовании механических колебаний, и может найти применение при . - определении физико-механических свойств материалов.
Цель изобретения - повьшение быстродействия измерения динамических характеристик материалов за счет ю :автоматизации определения диссипа- тивной составляющей волнового сопро- :тивления, , : На- чертеже представлена структурная схема устройства.15
Устройство для измерения динами- ческих характеристик материалов, со держит вибратор 1, механически свя- занный с ним датчик 2 силы, выпол- 20 ненный. в виде синхронного генератора 3, обмотка 4 статора которого ориен- тирована перпендикулярно к плоскости
исследуемого материала, ,а обмотка 5 ротора генератора 3 ориентирована 25 ,перпендикулярно к радиус-вектору
неуравновешенной вращающейся массы б вибратора 1 и подключена к возбу- .дителю 7 сигнала,перпендикулярного
ci-ше. Датчик 8 скорости подключен к зо блоку 9 умножения (формирователю мощности) и к блоку. 10 умножения -(скорости). Выход блока 10 умножения соеди нен с выпрямителем 11. Выходы блока 9 умножения и выпрямителя 11 соедине- ,g ны с входами блока 12 деления (формирователя активного сопротивления), который через блок 13 умножения (масштабирования) подключен,к. инверсному входу сумматора 14. Датчик 8 скорое- Q ти через дифференцирующий преобразователь 15, срстоянр-ш из потенциометра 16, емкости 17 и дифференцирующего усилителя 18, присоединен к прямо- входу сумматора 14, а через интегт-д рирующий усилитель 19 - к горизонтально отклоняющим пластинам элект- ронно лучевого индикатора 20,
На вертикально отклоняющие .пласти- 50 нь индикатора 20 подключен выход сум- матера 14. Выход датчика 2 силы под-г. ключен к входу блока 9.умножения и прямому входу сумматора 14. Выход датчика 8 скорости подключен к блоку. 55 ГЗ умножения -Вибратор 1, датчик 2 силы, датчик 8 скорости расположены на -исследуемом материале 21
Устройство работает следующим образом.
При вращении вала вибратора 1 в якоре возбудителя 7, сигнала вырабатывается напряжение, пропорциональное скорости вращения вала вибратора 1, это напряжение подается на обмотку, i 5 ротора синхронного генератора 3 датчика 2 силы. На обмотке 4 статора генератора 3 индуктируется напряжение, пропорциональное мгновенному , значению центробежной силы вращающейся массы 6 вибратора 1. Сигнал с обмотки 4 статора подается на сумматор 14 и блок 9 умножения, сигнал с датчика В скорости - на второй вход блока 9 умножения, на выходе которого формируется сигнал в аналоговой форме, пропорциональный мощности излучения вибратора 1 в материал 21. Сигнал с датчика 8 скорости подается на оба входа блока 10 умножения, на выходе которого формируется сигна пропорциональный квадрату скорости. Сигнал с блока 1.0 умножения подается на вьшрямитель 11, на выходе которого формируется постоянный зо времени сигнал, пропорциональный модулю квадрата скорости, С блока 9 умножения и выпрямителя 11 сигналы подаются на блок 12- на вькоде которого формируется сигнал, пропорциональйьй активному сопротивлению излучения вибратора 1. Сигнал с блока 12 деления подает- ся на блок 13 умножения, на котором сигнал датчика 8 скорости перемножается с сигналом активного сопротивления, формируя сигнал, пропорциональный активной мощности излучения. Сигнал с блока 13 умножения подается на инверсный вход сумматора 14 и явлется сигналом обратной связи по скорости. С датчика 8 скорости сигнал подается на интегрирующий преобразователь 19, где формируется вибросмещение, а через дифференцирующий преобразователь 15, где формируется инерционная составляющая сила, сигнал подается на сумматор 14. На вертикально отклоняющие пластины индикатора 20 подается сигнал с сзшмато- ра 14, а на горизонтально отклоняю- щие .пластины индикатора 20 - сигнал от интегрирующего преобразователя 19, На экране индикатора 20 получается полная динамическая характеристика исследуемого материала 2-1 без
каких-либо предварительных операций пересчета.
Формула изобретения
Устройство для измерения динамических характеристик материалов,, содержащее вибратор, механически связанный с ним датчик силы, последовательно соединенные датчик скорости, дифференцирующий преобразователь скорости и сумматор, второй вход которого подключен к выходу датчика силы, интегрирующий преобразователь, входом связанный с датчиком скорости и электронно-лучевой индикатор, вертикально отклоняющие пластины которого подключены к выходу сумматора, а горизонтально отклонякмцие пластиныг к выходу интегрирующего преобразователя, от. личающ ееся тем, что, с целью повышения быстродейстг. ВИЯ, оно снабжено п,оследовательно соединенными первым блоком умножения, входы которого подключены к выходу
датчика скорости, выпрямителем, бло ком деления и вторым блоком умножения, второй вход которого связан с выходом датчика скорости, а выход - с инверсным входом сумматора, и третьим блоком умножения, входы которого подключены соответственно к датчику силы и датчику скорости, а выход - к второму входу блока деления.
