. 1
Иаобретение огносигся к эпекгро(Технике и можег быгь использовано во всех отраслях промышленности, где требуется быстродействующий, высокоточный R бесконтактный электропривод с регулированием либо момента, либо ско- рости, либо углового положения вала нагрузки. Например, упомянутый электропривод может быть использован в системах программного управления стенка- ю ми.
Известны электроприводы с асинхронным двигателем и с датчиком углового положения его ротора. Кроме того, в этих приводах содержится задатчик час- «s тоты токов-ротора, выполненный на базе электромеханической слэдяшей системы С 1
Однако известные электроприводы обладают сложной конструкцией, низким 20 быстродействием и невысокой точностью управления.
Наиболее близким к предлагаемому по технической сущности и постигаемому
результату является электропривод, содержащий асинхронный электродвигатель, задатчики активного и реактивного токов, управляемый генератор частоты, датчик угла, ротор которого механически соединен с ротором асинхронного электродвигателя, статорные обмотки которого подключены через регулируемый источник токов к выходам блока фазочувствительных выпрямителей, входы для опорных сигналов котооого связаны с выходами мноро фазного источника напряжения 123.
В этих электроприводах сигналы задания активного и реакгевного токов асшхронного электродвигателя испоЩ|ЩуЮтся в контуре упре ления возбуждением вращающегося трансформатора, что, с одной стороны, ухудшает динамические свойства э/ЬКтропривода, а с другой7|ав по оляет нопользовать упомянутый вращак шийся трансформатор для целей регулиройания углового положения нагрузки.
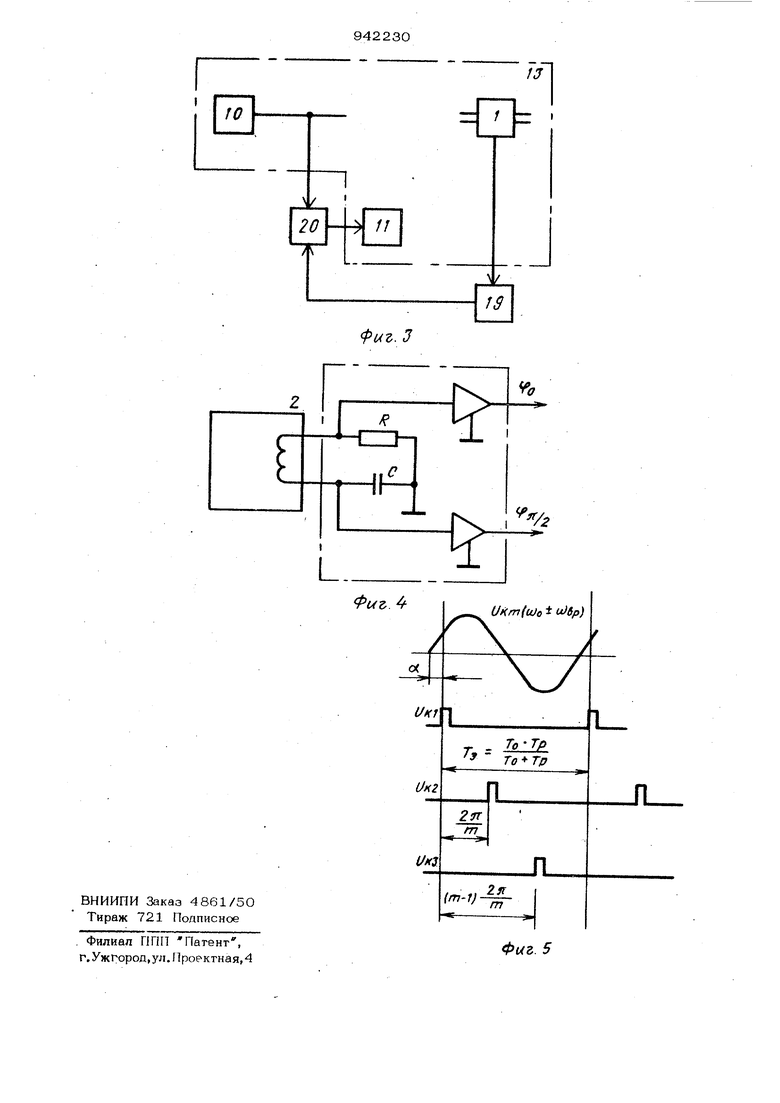
Цель изобретения - повышение быстродействия и точности управления моментом, 3Q4 ,алекгрситривоаа с асинхронным цвигателэм и упрощение конструкции элекгропривода, Указанная цель достигается тем, что электропривод, содержащий асинхронный электродвигатель, задатчики активного и реактивного токов, управпяемый генератор частоты, вход которого связан с задатчиком активного тока, датчик угла, ротор Которого механически соеданен с ротором асинхронного электродвигателя, статораые обМоткн которого подключены через регулируемый источник токоь к выходам фазочувствительных выпрямителей, входы для опорных сигналов которого связаны с выходами многофазного источника напряжения, снабжен преобразователем числа фаз, двумя блоками умножения, суммаTopoMj формирователем синусоидального напряжения, в многофазный источник напряжения составлен из последовательно включенных задатчика опорных частот, сумматора частот делителя частоты и расщепителя фазы, выходы которого образуют выходь многофазного источника напряжения, причем ко входу сумматора частот подключен выход управляемого генератора частоты, а выход задатчика опорных частот связан с входом формирователя синусоидального напряжения, вьосод которого через автчик угла подключен ко BXOI. преобразователя числа фазр каждый фазный выход которого соединен с одаим входом каждого из блоков умножения, Оругиё входы которых поцключены соот „ ветственно к выходам задатчнков активного и реактивного токов, а выходы блоKt умножения через сумматор связаны с входом для управЛ5пощего сигнала блока фазочувствительных выпрямителей. Кроме того, электропривод снабжен блоком деления, вход делимого которого связан с выходом задатчика активного тока, вход дештеля - с выходом задатчика реактивного тока, а выход блока рвленяя подключен ко вхоцу управляемого генератора частоты. Электропривод также снабжен датчиком температуры асинхронного двигателя с блоком коррекции, входы которого подключены к выходам задатчика активного тока и датчика температуры, а выход связан со входом управляемого генератора. На 4иг. I показана структурная схема эдактропривода; на фиг. 2 - схема включения блока деления в канале регулирования частоты токов ротора на фиг. 3 схема подк;почения датчика температуры к каналу регулирования частоты токов ротоpaj Ha фиг. 4 - схема преобразования чис 04 а фаз и векторная диаграмма напряжений дпя этого преобразования; на 4иг, 5 - временные диаграммы п -фазной системы сиг налов коммутация. Электропривод содержит асинхронный двигатель I (фиг. 1), на валу которого установлен датчик 2 угла, выполненный. в виде синусно-косннусного вращающегося трансформатора, обмотки которого соединены по схеме фазовращателя при однофазном питании. Статорные обмотки электродвигателя I подключены через регулируемый источник 3 тока к блоку 4 фазочувствигельных выпрямителей. Один блока 4 подключен к сумматору 5, . входы которого через блоки 6 и 7 умножения подключены к выходам преобразователя 8 числа фаз вход которого через синусно-косинусный вращающийся .грансформатор 2 связан с выходом формироватедя 9 однофазного синусоидального напряжения. Вход блока 6 умножения соединен с выходом за датчика 10 активного тока, к которому подключен вход управляеМого гевюратора 11 частоты, а вход блока 7 умножения соединен с задатчнком 12 реактивного тока. Блок 4 фазочувствитеяьных выпрямителей питается от многофазного источника 13 напряжения, который состоит из послеаовате|Щ но соединенных между собой задатчика 14 опортых частот, сумматора 15 частот, делителя 16 Частот к расщепителя 17 фаз, выхоц которого подклю ®и к блоку 4, причем к одному из вхои сумматора 15 частот подключен выход управляемого генератора 11 частоты, а выход задатчика 14 опорных частот соединен со. входом формирователя 4 однофазного синусоидального напряжения. В электропривод дополнительно быть введен блок 18 целения (4мг.2) выходы которого соединены с задатчиками Ш и 12. В электроприводе реализован частотно-токовый способ управления моментом асинхронного двигателя, согласно которому в статорные обмотки электродвигателя Ч задаются токи, а частота этих токов формируется в виде суммы частоты врашения ротора Otlgp н требуемой частоты OUp токов ротора. Ток статора форкяруеч ся в виде квадратурной суммы двух токов: тока намагничивания la , определяющего магнитный поток двигателя, и приведенного к статору тока ротора - активного тока IQ t созданжего момент на валу двигателя. 59 В соответствии с этим электропривод работает следующим образом. 3ацатчик 12 реактивного тока формирует сигнал задания тока 1д1У (магнитного потока двигателя), который поступает на опии вход блока 7 умнохсения. Задатчик Ю активного тока 1д фо{ мируег сигнал UQ , который поступает на ощш вход блока 6 умножения. На другие входы блоков 6 и 7 умножения поступают овухфваные сигналы с выходов преобразователя 8 числа фаз. На вход этого преобразователя от вращакидегося трансформатора 2 поступает синусоидальное однофазное напряжение Ug , фаза которого изменяется со скоростью ttjj . Преобразователь 8 числа фаз может быть выполнен на базе .ч1епи (фиг. 4). В этом случае на выходе преобразсьателя числа фаз имеются два напряжения (is)btuJBp)t+otoli А со% t ( i)-t otoX где А - амплитуда сигналов на выходе блока 8: cLff- начальная фаза. На выходах блоков 6 и 7 умножения фор мируются сигналы АО Q %Aw U t )t -Kio 1, A ,|;(u)ot«;Bp)t ЫоЗ которью суммируются в сумматоре 5, при этом на его выходе формируется синусоидальный сигнал с амплитудой, равной AVUq- Ul и частотой ( ( ). Спорная частота м/д формируется задатчиком 14 опорных частот, роль, ко торого межет выпол1ять генератор прямоугольных колебаний с частотой Частота WQ намного превышает частоту : для того, чтобы не сказьшалнсь инерционные свойства элементов, участвующих в преобразовании сигналов, содержеодих эту частоту. Прямсугольные ко лебания с частотой иЛо поступают от зацатчнка 14 оггодаых чеютот в формирователь 9, который формирует однофазное синусоидальное напряжение, питающее вра швгсишйся. грансформатор, который выtIOЛЯ; ет ротъ фазовращателя. Однофвзное напряжение Uj синусоидальной ф.ормы с фазой, завис5пцей от частоты Ц)рр , посту пает (как уже упоминалось) на вход преобразователя 8 числа фаз. Для того, чг бы в асинхронном электродвигателе пронс 0 ХОДИЛО разделение тока статора на требуемые с fx: т авляюшие токи i и Те I необходимо в соответствии с сигналами Up и UQ формировать частоту токов ptvторагде Т - постоянная времени цепи ротора двигателя. Для формирования требуемой частоты (tip служит управляемый генератор II частоты. Когда асинхронный электродви- гатель I работает при неизменном намагничивания Х/л , то управление частотой генератора 11 обеспечивается сигналом UQ (фиг. I) . В том cjjyHae, когда вследствие ограничений по напряжению регулируемого источника 3 тока при сохранении номинального момента на Ъйлу нельзя получить скоростей вращения , больших номинальной скорости, переходят к управлению величиной тока намагничивания I/j и осуществляют р&жим работы привода с постоянством мощности. В этом случае генератор 11 должен угфавляться через блок 15 деления ((}иг. 2), что обеспечит линейную зависимость момента от сигнала DQ . В том случае, когда тепловой режнМ работы асинхронного двигателя сильно колеблется и нельзя считать неизменной величину постоянной времени Т, необходимо управление генераторов II вести через блок 19 коррекции (фиг. 3). Для этого в приводе используют датчик 20 температуры. Во всех рассмотренных сцучаях на выходе генератора 11 формирует ся сигнал, частота которого пропорциональна частоте Шр и которая складывается в сумматоре 15 частот с частотой (жгнала, поступакицего от задатчика 14 . опорвых частот. Сигнал с выхода сумматора 15 частот поступает на делите ;в 16 частоты, на выходе которого, формируется однофазный сигнал частоты (it, &(№ который,в свою очередь, преобразуется в расщепителе 17 4озы в многофазный сигнал ию1( t ) (фиг. 5). Сигналы KW Ub i являются опорными сигналами для блока 4 фазочувствнтель1.ЫХ выпрямителей. На выхо( блока 4 формируется в общем случае имногофа ный сигнал с амплитудой U , пропорииона«а ной требуемой величине тока статора т.е. проворшональной величине VUo+.u зя с частотой Ц% u bp-tu;p , где часгота токов стагора элакгроцвигатела 1. В прецлагаемом электропризоце как в статических, так и в динамических режимах работы момент на валу пропорционален сигналам задания UQ и Ujj, так как в контурах управления величиной тока статора и частотой токов ротора отсутствую инерционные элементы, имеющие существенные для управления моментом постоянные времени. Сочетание быстродействующей систе- мы управления с высокодинамичным короткозамкнутым двигателем позволяет обеспечить в электроприводе высокое быстродействие и точность управления моментом, что, в свою очередь, позволяет использовать этот привод в гдубокорегулируемых по скорости и с высокочастотных позиционных системах ления металлорежущими станками. В это случае, когда электропривод исполь етс в позшионной системе управления, нет необходимости в установке дополнительно го по сравнению с датчиком 2 датчика положения. Сигналы датчика 2 используются для. получения информации о полсь. жении нагрузки, что упрсщает конструкцию электропривода. Для повышения точности управления моментом скоростью и положением вала электроприво Датчики угла и скорости выполняются встраиваемой конструкции. Формула изобретения 1. Электропривод, содержащий асинхронный электгродвигатет., задатчики активного и реактивного токов, управляемый генератор частоты, вход которого связан с задатчиком активного тока, дат чик угла, ротор которого механически со единен с ротором асинхронного электродвигателя, статорные обмотки которого подключены через регулируемый источник токов IK выходам блока фазочувствительных выпрямителей, входы для опорных сигналов Которого свябаны с выходами многофазного источника напряжения, от личающийся тем, что, с целью увеличения быстродействия, снабжен преобразователем числа фаз, двумя блоками умножения, сум мат.опрл .фррмирова телем. синусоидального напряжения, многофазный источник напряжения составлен из последовател но включенных задатчика опорных частот, сумматора частот, делителя частоты и расщепителя фазы, выходы которого обрадуют выходы многофазного источника напракеяия, причем ко вхоцу сумматора частот подключен выход управляемого генератора частоты, а выход задатчика опорных частот связан со входом формирователя синусоидального напряжения, выход которого через датчик угла подключен ко входу преобразователя числа фаз, каждый фазный выход которого соединен с одним входом каждого из блоков умножения, другие входы .которых подключены соответственно к выходам з датчикбв активного и реактивного токов, а выходы блоков умножения через сумматор связаны со входом для управляющего сигнала блока фааочувствительных выпрямителей. 2.Электропривод по п. 1, отличающийся тем, что, с целью уве- личения диапазона регулирования скоростей, он снабжен блоком деления, вход делимого которого связан с выходом задатчика активного тока, вход делителяс выходом задатчика реактивного тока, а выход блока, деления подключен ко вхоvy управляемого генератора частоты. 3.ЭлЕ-ктропривод по п. 1, о т л и ч ающийсятем, что, с целью повыщения точности управления моментом, он снабжен датчиком температуры асинхронного электродвигателя и блоком коррекции, входы которого подключены к выходам задатчика активного тока и датчика температуры, а выход связан со входом управляемого генератора частоты. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 193604. кл. Н 02 Р 5/28, 1967. 2. Серия инженерных монографий. Тег&ническая кибернетика. Под ред. д-ра тех. наук проф. В. В. Солодовникова, М., Машиностроение, 1976, кн. 3, с. 266-271.
ffut. /



| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| Частотно-управляемый электропривод | 1987 |
|
SU1453576A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2619919C1 |
| Задатчик активного тока дляАСиНХРОННОй МАшиНы | 1978 |
|
SU847479A1 |
| Электропривод переменного тока | 1980 |
|
SU1114358A3 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |

1
10
1J
I
J
n
фиь. 2
Л
