(Л
С
модулей 4х, Ах, 5у, 5у. Каждый модуль содержит магнитопроводы, между кото- рыми расположен сектор кольцевого магнита 8. На полюсах установлены обмотки управления 12 и 16. На торцовой поверхности полюсов модулей выполнены группы зубцов 17-20 соответственно. Ярма одноименнополюсных магнито- проводов объединены и составляют ярмо якоря. Каждое из двух ярм якоря выполнено в виде шайбы. Шайбы установлены концентрично друг другу. Полюса маг- нитопроводов вьтолнены в виде концентрических сегментов и расположены на соответствующих шайбах. Модули, расположенные в каждом из квадрантов якоря, образованы полюсами, сегментами шайб и сегментом постоянного кольцевого магнита, размещенными в тех же квадрантах. 5 ил.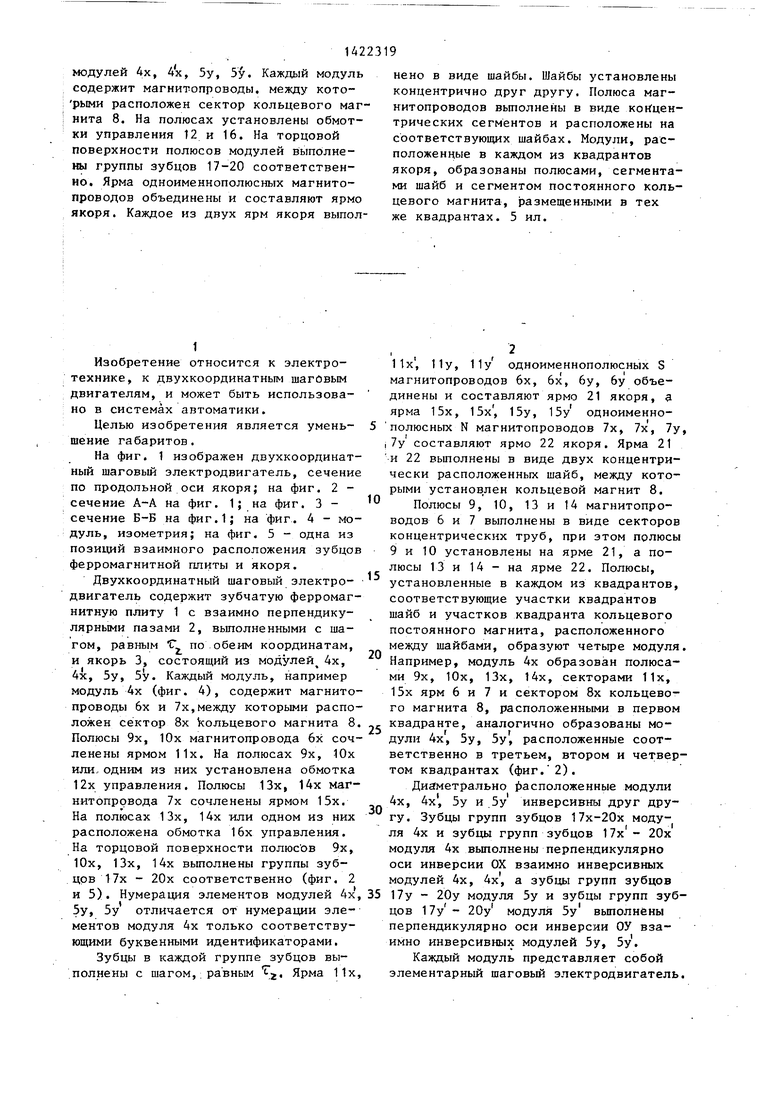
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХФАЗНАЯ СТЕРЖНЕВАЯ ВОЛНОВАЯ ОБМОТКА ЭЛЕКТРИЧЕСКИХ МАШИН ПРИ ЦЕЛЫХ ЧЕТНЫХ ЧИСЛАХ q=z/6p≥4 | 2008 |
|
RU2362250C1 |
| Устройство для умножения | 1987 |
|
SU1509875A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
| Двухкоординатный электрический двигатель | 1980 |
|
SU972637A1 |
| СПОСОБЫ УЛУЧШЕНИЯ ФУНКЦИИ ПЕЧЕНИ | 2013 |
|
RU2613110C2 |
| Якорь многофазной электрической машины | 2018 |
|
RU2684898C1 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ СИНХРОННАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414794C1 |
| Линейный шаговый электродвигатель | 1988 |
|
SU1658314A1 |
1
Изобретение относится к электротехнике, к двухкоординатным шаговым двигателям, и может быть использовано в системах автоматики.
Целью изобретения является уменьшение габаритов.
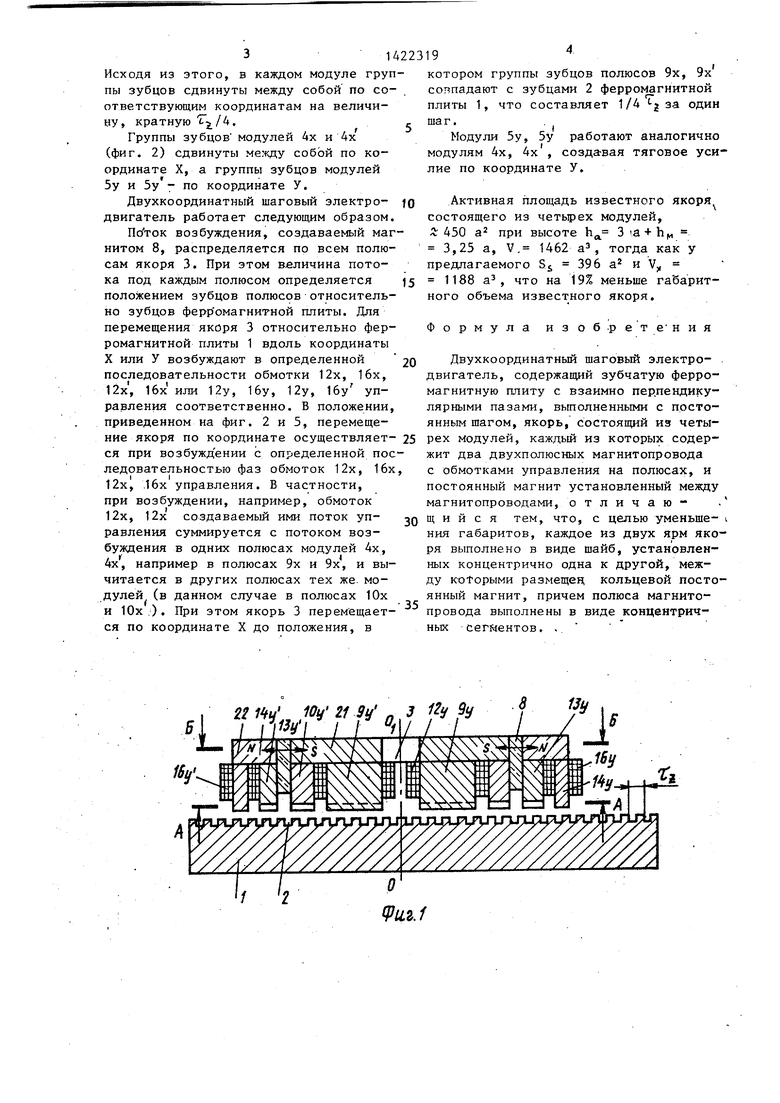
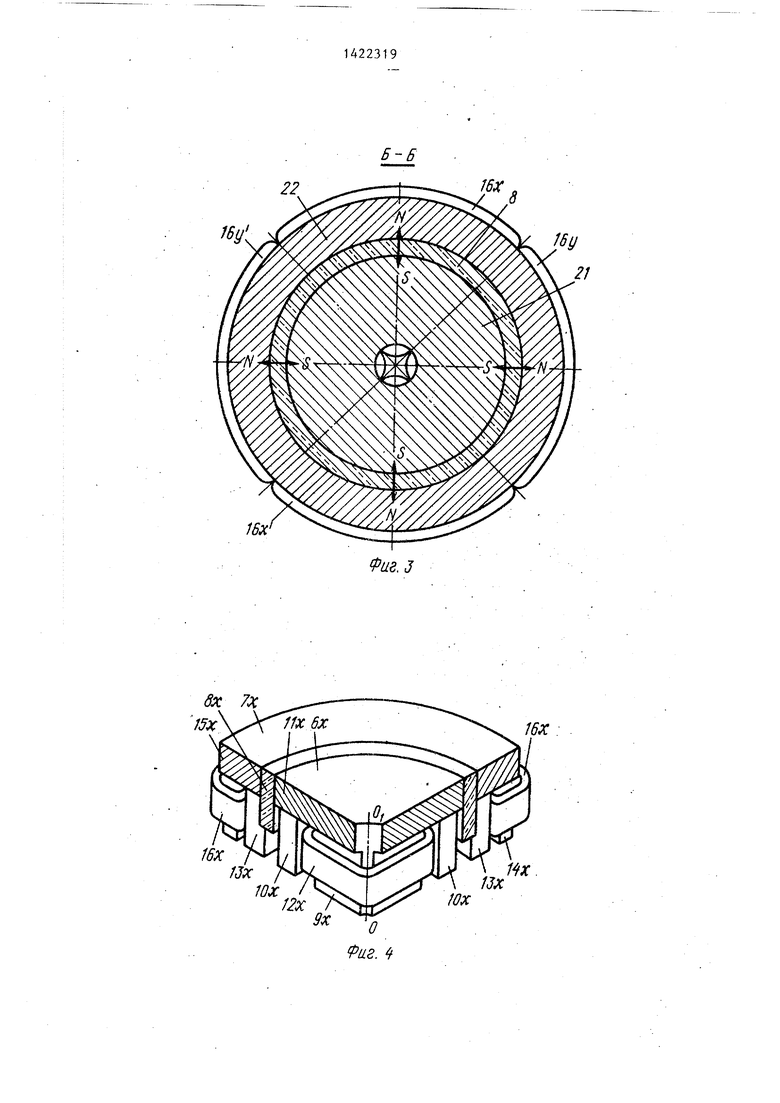
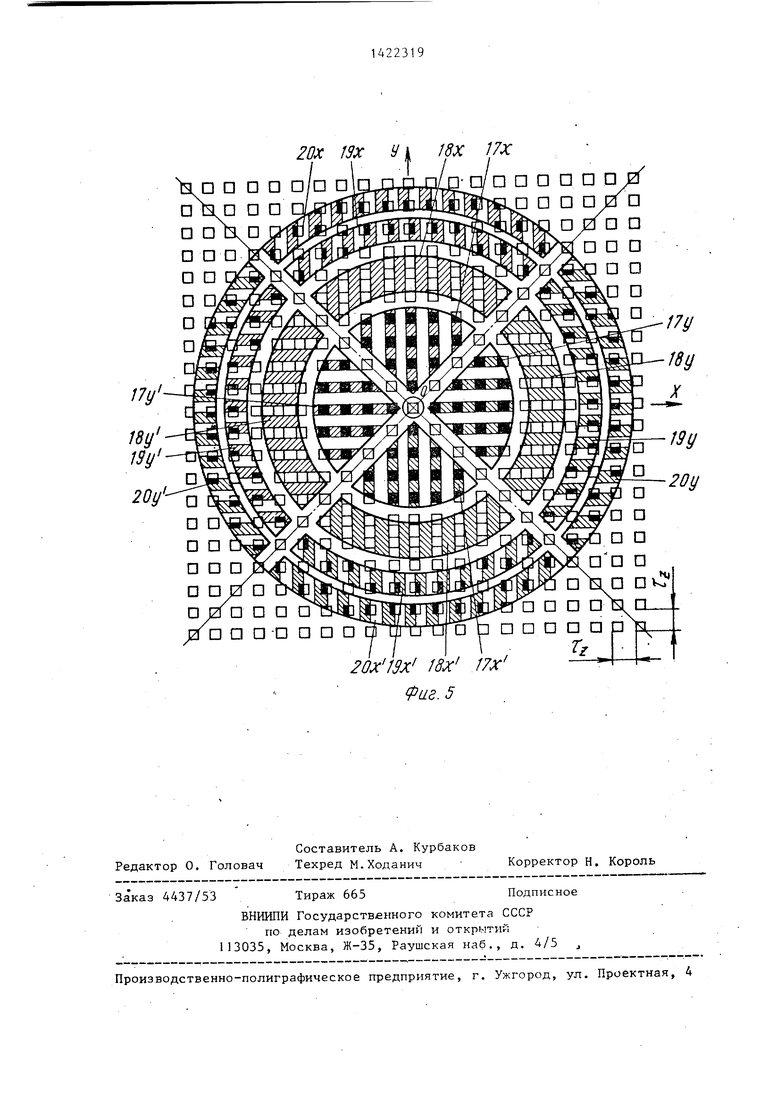
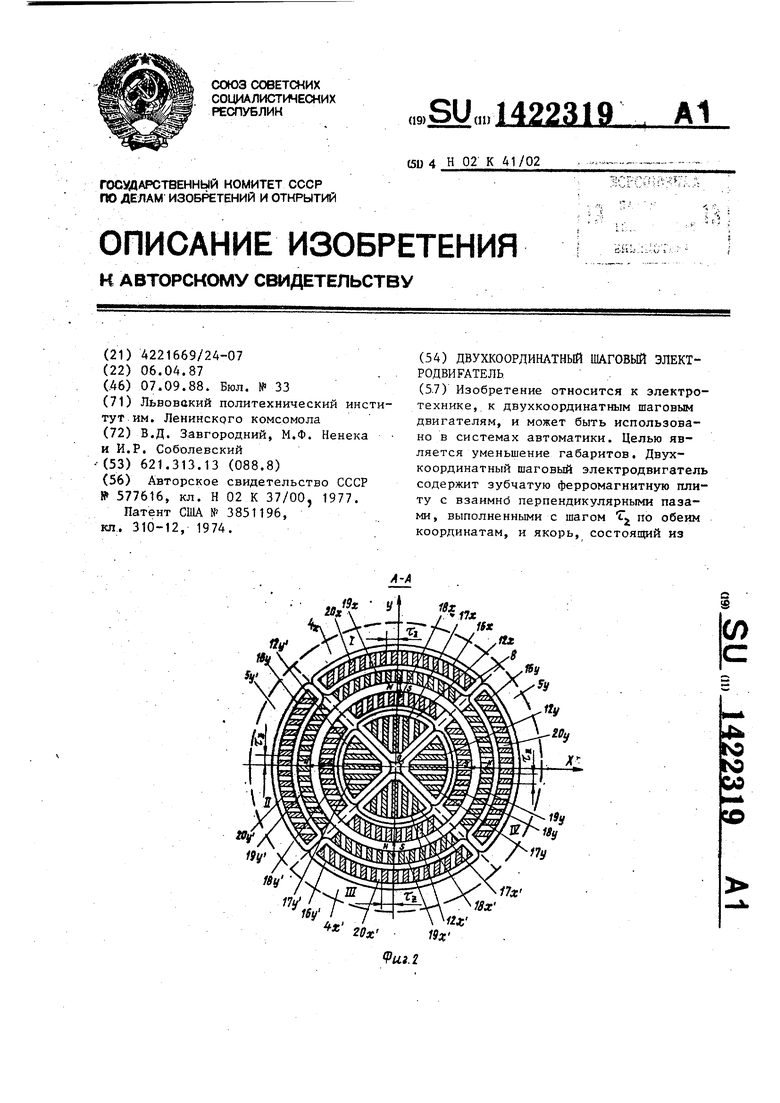
На фиг. 1 изображен двухкоординат- ный шаговый электродвигатель, сечение по продольной оси якоря; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг.1; на фиг. 4 - модуль, изометрия; на фиг. 5 - одна из позиций взаимного расположения зубцов ферромагнитной плиты и якоря.
Двухкоординатный шаговый злектро- двигатель содержит зубчатую ферромагнитную плиту 1 с взаимно перпендикулярными пазами 2, выполненными с шагом, равным Т по обеим координатам, и якорь 3, состоящий из модулей Ах, 4х, 5у, 5у. Каждый модуль, например модуль 4х (фиг. 4), содержит магнито- проводы 6х и 7х,между которыми расположен сектор 8х koльцeвoгo магнита 8 Полюсы 9х, 10х магнитопровода 6х сочленены ярмом 11х. На полюсах 9х, 10х или, одним из них установлена обмотка 12х управления. Полюсы 13х, 14х маг- нитопррвода 7х сочленены ярмом 15х. На полюсах 13х, 14х или одном из них расположена обмотка 16х управления. На торцовой поверхности полюс ов 9х, 10х, 13х, 14х вьтолнены группы зубцов 17х - 20х соответственно (фиг. 2 и 5). Нумерация элементов модулей 4х 5у, 5у отличается от нумерации элементов модуля 4х только соответствующими буквенными идентификаторами.
Зубцы в каждой группе зубцов выполнены с шагом,; равным Ярма 11х
5
0
5
0
5
1 1х , 11у, 11у одноименнополюсных S магнитопроводов 6х, 6х, 6у, 6у объединены и составляют ярмо 21 якоря, а ярма 15х, 15х , 15у, 15у одноименнополюсных N магнитопроводов 7х, 7х, 7у, 7у составляют ярмо 22 якоря. Ярма 21 и 22 выполнены в виде двух концентрически расположенных шайб, между которыми установлен кольцевой магнит В.
Полюсы 9, 10, 13 и 14 магнитопроводов 6 и 7 выполнены в виде секторов концентрических труб, при этом полюсы 9 и 10 установлены на ярме 21, а полюсы 13 и 14 - на ярме 22. Полюсы, установленные в каждом из квадрантов, соответствующие участки квадрантов шайб и участков квадранта кольцевого постоянного магнита, расположенного между шайбами, образуют четьфе модуля. Например, модуль 4х образован полюсами 9х, 10х, 13х, 14х, секторами 11х, 15х ярм 6 и 7 и сектором Эх кольцевого магнита 8, расположенными в первом квадранте, аналогично образованы модули 4х, 5у, 5у , расположенные соответственно в третьем, втором и четвертом квадрантах (фиг. 2).
Диаметрально расположенные модули 4х, 4х , 5у и 5у инверсивны друг другу. Зубцы групп зубцов 17х-20х модуля 4х и зубцы групп зубцов 17х - 20х модуля 4х выполнены перпен,цикулярно оси инверсии ОХ взаимно инверсивных модулей 4х, 4х, а зубцы групп зубцов 17у - 20у модуля 5у и зубцы групп зубцов 17у - 20у модуля 5у выполнены перпендикулярно оси инверсии ОУ взаимно инверсивных модулей 5 у, 5у .
Каждый модуль представляет собой элементарный шаговый электродвигатель.
31
Исходя из этого, в каждом модуле группы зубцов сдвинуты между собой по соответствующим координатам на величину, кратную .
Группы зубцов модулей 4х и 4х (фиг. 2) сдвинуты между собой по координате X, а группы зубцов модулей 5у и 5у - по координате У.
Двухкоординатный шаговый электродвигатель работает следующим образом.
ПоСток возбуждения, создаваемый магнитом 8, распределяется по всем полюсам якоря 3. При этом величина потока под каждым полюсом определяется положением зубцов полюсов относительно зубцов ферр омагнитной плиты. Для перемещения якоря 3 относительно ферромагнитной плиты 1 вдоль координаты X или У возбуждают в определенной последовательности обмотки 12х, 16х, 12х, 16х или 12у, 16у, 12у, 16у управления соответственно. В положении, приведенном на фиг. 2 и 5, перемещение якоря по координате осуществляет- ся при возбужд ении с определенной последовательностью фаз обмоток 12х, 16х 12х, .16х управления. В частности, при возбуждении, например, обмоток 12х, 12х создаваемый ими поток управления суммируется с потоком возбуждения в одних полюсах модулей 4х, 4х, например в полюсах 9х и 9х и вычитается в других полюсах тех же. модулей (в данном случае в полюсах 10х и 10х.). При этом якорь 3 перемещает- ся по координате X до положения, в
%,„. f I
котором группы зубцов полюсов 9х, 9х соппадают с зубцами 2 ферромагнитной плиты 1, что составляет 1/4 j за один
шаг.
1
работают аналогично созда-вая тяговое уси лие по координате У.
Модули 5у, 5у модулям 4х, 4х ,
Активная площадь известного якоря состоящего из четьрех модулей, 450 а при высоте h 3 а + Ьц, 3,25 а, V. 1462 а, тогда как у предлагаемого 5 396 а и V
1188 а, что на 19% меньше габаритного объема известного якоря.
Формула изоб р
е т е н и я
25
20
30
Двухкоординатный шаговый электро- двигатель, содержащий зубчатую ферромагнитную плиту с взаимно перпендикулярными пазами, выполненными с постоянным шагом, якорь, состоящий из четырех модулей, каждьй из которых содержит два двухполюсных магнитопровода с обмотками управления на полюсах, и постоянный магнит установленный между магнитопроводами, отличаю- . щ и и с я тем, что, с целью уменьше- ния габаритов, каждое из двух ярм якоря выполнено в виде шайб, установленных концентрично одна к другой, между которыми размещеч кольцевой постоянный магнит, причем полюса магнито- провода выполнены в виде концентричных cersieHTOB. ,
ay
%:
т
%
Фав.З
Ш
т.
20х Ш
20x J9x 18х 17х Фае. 5
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3851196, кл | |||
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
