Изобретение относится к электротехнике и может быть использовано ф автоматизированных системах, к ко- форым предъявляются требования высо- ой точности регулирования скорости вращения электродвигателя постоянного тока.
Цель изобретения - повышение точности регулирования скорости вращения электродвигателя за счет исключения влияния эксцентриситета механического модулятора.
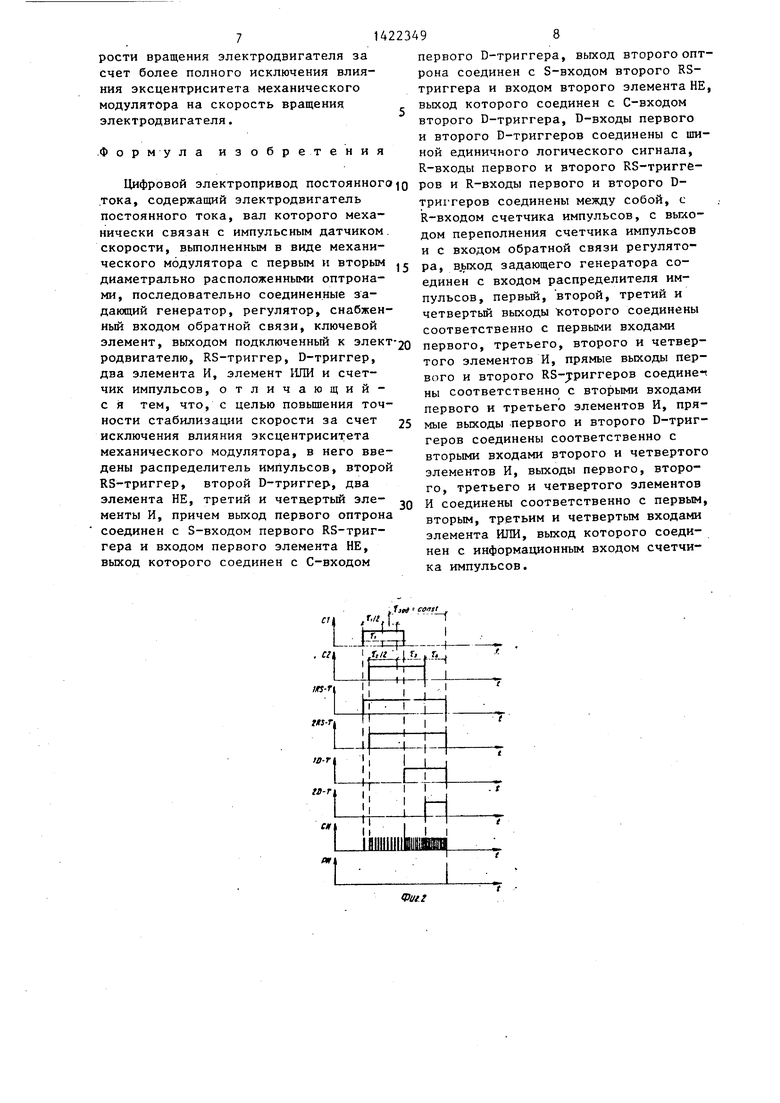
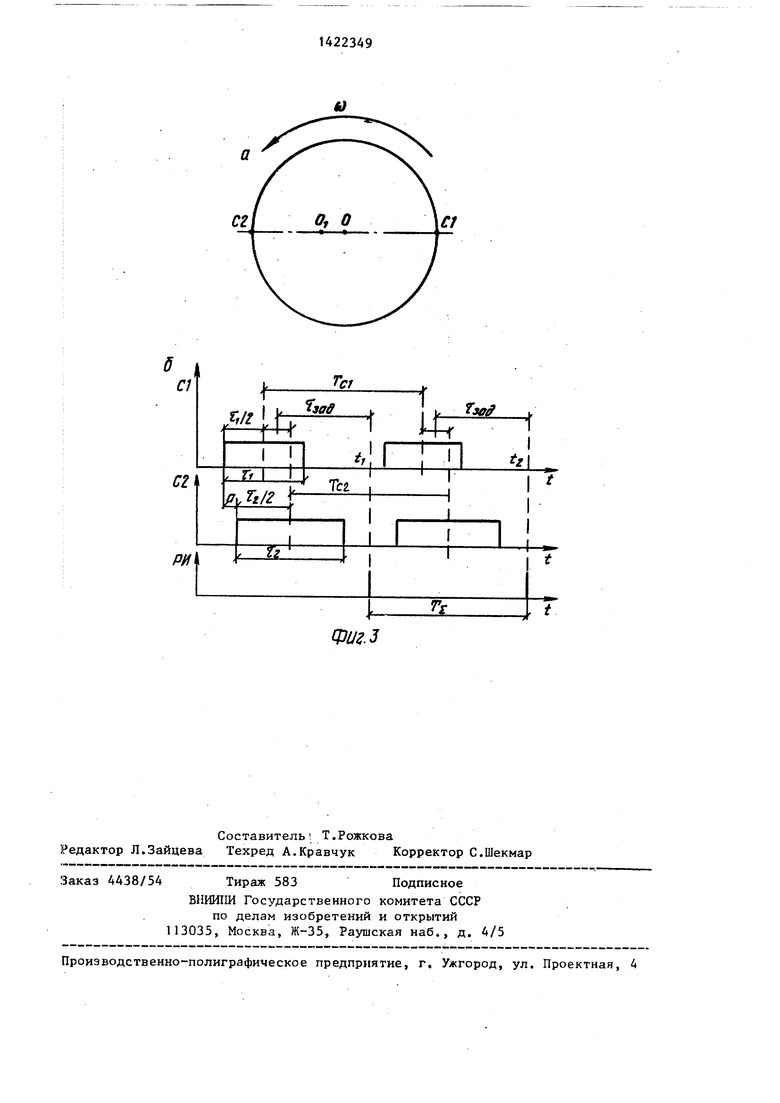
На фиг. 1 приведена структурная (Ьхема цифрового электропривода по- . стоянного тока; на фиг. 2 - временная диаграмма работы цифровой части электропривода; на фиг. За и б - диаграмма, поясняющая исключение эксцентриситета .
Цифровой электропривод постоянного тока содержит электродвигатель 1 ;с механическим модулятором, ключевой элемент 2, выходом подключенный к электродвигателю 1, регулятор 3, вы- хЬдом подключенный к ключевому элементу 2, диаметральйо расположенные первый оптрон 4 и второй оптрон 5, задающий генератор 6, первый и второй элементы НЕ 7 и 8, распределитель 9 импульсов, первый и второй RS-тригге- ры 10 и 11, первь1й и второй D-триг- геры 12 и 13, элементы И 14 - 17, элемент ИЛИ 18 и счетчик 19 импульсов. Выход первого оптрона 4 соединен с S-входом первого RS-триггера 10 и входом первого элемента НЕ 7, выход которого соединен с С-входом первого D-триггера 12. Выход второго оптрона 5 соединен с S-входом второго RS- триггера 11 и входом второго элемента НЕ 8, выход которого соединен с С-входом второго D-триггера 13. R- входы RS-триггера 10 и 11 и R-входы D-триггеров 12 и 13 соединены между собой, с входом сброса (К-входом) и с выходом переполнения счетчика 19 импульсов и с входом обратной связи регулятора 3. Выход задающего генератора 6 соединен с задающим входом регулятора 3 и входом распределителя 9 импульсов, первый, второй, третий и четвертый выходы которого соединены соответственно с первыми входами первого 14, третьего 16, второго 15 и четвертого 17 элементов И. Прямые выходы первого 10 и второго 11 RS-триг- геров соединены соответственно с вторыми входами первого 14 и третьего 16
0
5
0
0
5
0
5
0
элементов И. Прямые выходы первого 12 и второго 13 D-триггеров соединены соответственно с вторыми входами второго 15 и четвертого 17 элементов И. Выходы первого 14, второго 15, третьего 16 и четвертого 17 элементов И соединены соответственно с первым, вторым, третьим и четвертым входами элемента ИЛИ 18, выход которого соединен с информационным входом счетчика 19 импульсов.
Цифровой электропривод постоянного тока работает следующим образом.
Регулятор 3 сравнивает между собой последовательности импульсов, поступающих от задающего генератора 6с и с выхода переполнения счетчика 19 импульсов, и вырабатывает управляющее воздействие через ключевой элемент 2 на электродвигатель 1. При вращении механического модулятора первый 4 и второй 5 оптроны формируют прямоугольные импульсы С1 и С2 соответственно (фиг. 3). Частота следования импульсов С1 и С2 пропорциональна скорости тфащения механического модулятора и при наличии эксцентриситета механического модулятора указан- ,ная частота изменяется по синусоидальному закону около своего среднего значения. Период изменения частоты равен периоду, одного оборота моду- лятора, а величина изменения частоты пропорциональна,величине эксцентриситета. Совокупность элементов НЕ 7 и 8, распределителя 9 импульсов RS- триггеров 10 и 11, D-триггеров 12 и 13, элементов И 14 - 17, элемента ИЛИ 18 и счетчика 19 импульсов вместе с задающим генератором 6 образуют схему, которая формирует рабочие импульсы, снимаемые с выхода переполнения счетчика 19 импульсов и используемые как импульсы отрицательной обратной связи регулятора 3. Причем временное положение формируемых импульсов всегда остается строго постоянным относительно середины между центрами импульсов, формируемых опт- ронами 4 и 5 (фиг. 2).
гад.
.i..e,.e,.| -.
..
55
4 - 2 4 const, 4 г
(1)
где эаЛ время постоянной задерж- ки рабочего импульса обратной связи относительно
(С1) и второго 5 (С2) опт- ронов;
- длительность импульса первого оптрона;
2 длительность импульсов второго оптрона;
31422349
средней точки между цент- с выхода первого оптрона RS-триггер рами импульсов первого 4 10 устанавливается в единичное состояние и разрушает прохождение импульсов с первого выхода распределителя 9 импульсов через элемент И 14 и далее через элемент ИЛИ 18 на информационный вход счетчика 19 импульсов, При этом на счетчик 19 импульсов цо- j- время смещения задних фрон-ю ступают импульсы с частотой 1/4f,
тов импульсов 1 и ь ; Состояние схемы соответствует интервалу времени Ct,) , При появлении импульса С2 с выхода второго оптрона RS-триггер 11 также устанавли- 15 вается в единичное состояние и разрешает прохождение импульсов с второго выхода распределителя 9 импульсов через элемент И 16 и далее через элемент ИЛИ 18 на информационный
I и -2 J
с - время смещения рабочего
импульса относительно заднего фронта запаздывающего импульса (в данном случае Tj);
число разрядов цифрового эквивалента счетчика 19 импульсов;
п 
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель временного положения середины видеоимпульсов | 1990 |
|
SU1707571A1 |
| Цифровой измеритель временного положения середины видеоимпульсов | 1987 |
|
SU1449937A1 |
| Устройство для формирования символов на экране электронно-лучевой трубки | 1984 |
|
SU1251061A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ M-ФАЗНЫМ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2027294C1 |
| Электропривод постоянного тока | 1990 |
|
SU1721772A1 |
| Устройство для защиты трехфазного частотно-регулируемого привода от неполнофазного режима питания | 1985 |
|
SU1377950A1 |
| Цифровой измеритель временного положения середины видеоимпульсов | 1990 |
|
SU1718148A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство формирования многоступен-чАТОгО КВАзиСиНуСОидАльНОгО ТРЕХфАз-НОгО НАпРяжЕНия | 1979 |
|
SU817902A1 |
| Многопрограмный распределитель импульсов | 1987 |
|
SU1443163A1 |
Изобретение относится к электротехнике и может быть использовано в автоматизированных системах с высокими требованиями к точности регулирования скорости вращения электродвигателя постоянного тока.. Цель изобретения - повышение точности стабилизации скорости за счет исключения влияния эксцентриситета механического модулятора. Электропривод содержит электродвигатель 1, к-рый через ключевой усилитель 2 подключен к выходу регулятора 3. Регулятор 3 сравнивает последовательности импульсов от задающего генератора 6 и с вькода переполнения счетчика импульсов 19 и вырабатывает управляющее воздействие на электродвигатель 1 . Совокупность элементов НЕ 7 и 8, распределителя импульсов 9, RS-триггеров 10, 11 и D-триггеров 12,13, а также счетчика 19 с задающим генератором 6 образует схему, к-рая формирует рабочие импульсы с выхода переполнения счетчика 19, используемые как импульсы отрицательной обратной связи регулятора 3. Временное положение формируемых импульсов oqтaeтcя строго пос тоянным относительно середины между центрами импульсов, формируемых опт- ронами 4 и 5, что позволяет значительно уменьшить влияние эксцентриситета механического модулятора на скорость вращения электродвигателя. 3 ил. (С О) с: 4 ГО esd со со 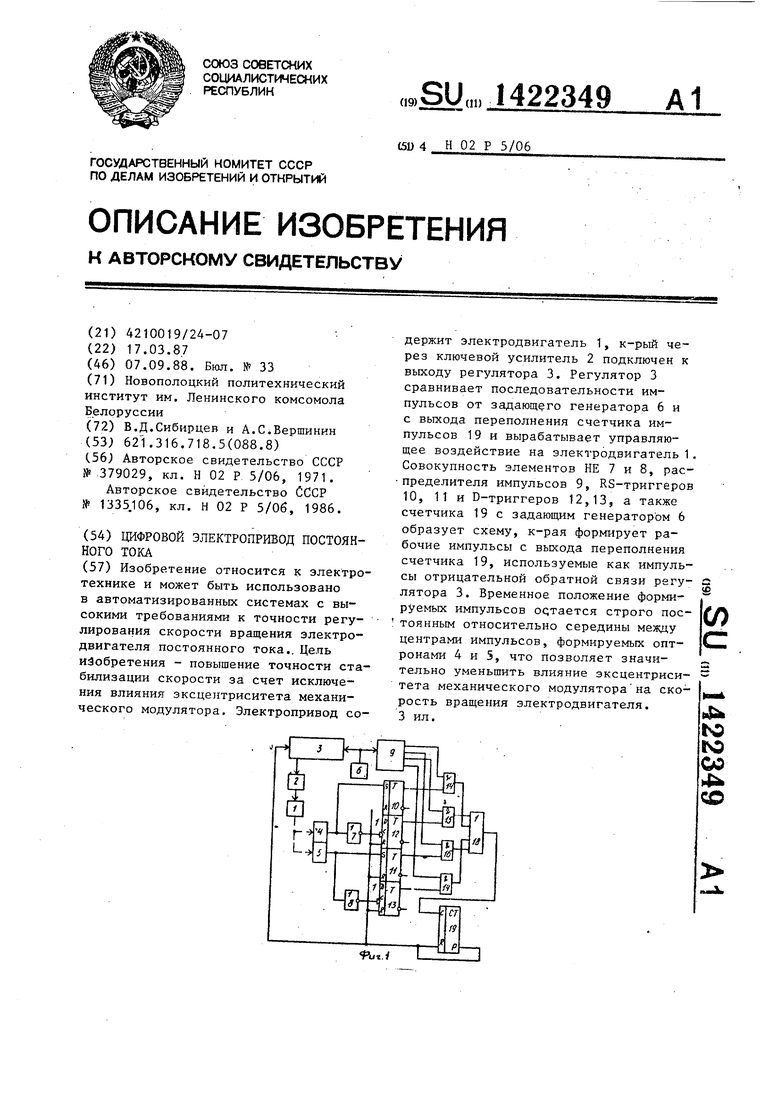
сов задающего генератора. Представляют величины С, и З в виде
f - частота следования импуль- 20 вход счетчика 19 импульсов. Так как
и первый 10 и второй 11 RS-триггеры находятся в единичных состояниях, то на информационный вход счетчика 19 импульсов проходят импульсы с часто- 25 той t/2f. Состояние триггеров соответствует интервалу времени ). С окончанием действия импульса С1, формируемого первым оптроном 4, задним фронтом этого импульса через
г, () + (.), )Подставляя в (1), получают
-г . . ,( ti- tO (ti-fj)
ад.-С, ( ±И- г.) .3 .Ь /. 1,
(2) (3)
,+-( Г2-Cj)+j(f, - Oi-t- 30 элемент НЕ 7 D-триггер 12 переводит- ,ся в единичное состояние и разрешает
))2 r const. ч / - 3,
С4)
1
прохождение импульсов с третьего выхода распределителя 9 импульсов через элемент И 15 и далее Через эле- 35 мент ИЛИ 18 на информационньш вход счетчика 19 импульсов. В результате того, что RS-триггёры 10 и 11 и D- триггер 12 находятся в единичных состояниях, на информационный вход счет- менного интервала импульса соответ- 40. чика 19 импульсов проходят импульсы ствующей частоты. Как следует из вы- с частотой 3/4f. Такие состояния укаТогда 2 е f+r, ) f+(r,
+ 4)-Jf.(5)
Операция умножения временного интервала на частоту следования импульсов эквивалента заполнению этого вреражения (5) интервал времени 4 заполняют импульсами с частотой f, интервал времени Т, с частотой 3/4f, интервал времени (cTj-Cj) с частотой . 1/2f и интервал времени (t, +€ ,) с частотой 1/4f (фиг. 2). () это - интервал времени перекрытия импульсов С1 ( Sj ) и С2 ( E j), а (t, + ) интервал времени между передними фронтами этих импульсов. Распределитель 9 импульсов непрерывно вырабатывае- четыре последовательности сдвинутых друг относительно друга во времени импульсов с частотой f/4. В исходном состоянии все триггеры 10 - 13 и счетчик 19 импульсов находятся в нулевом (сброшенном) состояний. При появлении импульса 01
занных триггеров соответствуют интервалу времени Zj . С окончанием действия импульса С2, формируемого вторым
45 оптроно.ч 5, задним фронтом этого импульса через элемент НЕ 8 D-триггер 13 - переводится в единичное и разрешает прохождение импульсов с четвертого вып- хода распределителя 9 импульсов через
50 элемент И 16 и далее через элемент ИЛИ 18 на информационный вход счетчика 19 импульсов. Так как все четыре триггера 10 - 13 находятся в единичных состояниях, то на информационном
55 входе счетчика 19 импульсов суммируются четыре последовательности сдвинутых во времени импульсов с частотой f/4, т.е. счетчик продолжает заполняться импульсами с частотой f.
(2) (3)
занных триггеров соответствуют интервалу времени Zj . С окончанием действия импульса С2, формируемого вторым
оптроно.ч 5, задним фронтом этого импульса через элемент НЕ 8 D-триггер 13 - переводится в единичное и разрешает прохождение импульсов с четвертого вып- хода распределителя 9 импульсов через
элемент И 16 и далее через элемент ИЛИ 18 на информационный вход счетчика 19 импульсов. Так как все четыре триггера 10 - 13 находятся в единичных состояниях, то на информационном
входе счетчика 19 импульсов суммируются четыре последовательности сдвинутых во времени импульсов с частотой f/4, т.е. счетчик продолжает заполняться импульсами с частотой f.
что соответствует интервалу времени (фиг. 2). При переполнении счетчика 19 импульсов, когда на его вход подано 2 импульсов, на выходе пере- I полнения счетчика формируется рабочий импульс, который сбрасывает счетчик, подтверждая нулевое состояние и все триггеры 10 - 13, и используется как импульс отрицательной обратной связи регулятора 3. Временное положение формируемого рабочего импульса строго постояннсз относительно средней точки между центрами импульсов С1 к С2, При этом период следования и частота формируемых рабочих импульсов свободны от влияния эксцентриситета механического модулятора.
На фиг. За условно показан механический модулятор, который вращает- ся с круговой скоростью со и в котором геометрический О и физический О, центры вращения не совпадают. Отрезок 00(й- величина эксцентриситета Касательная скорость механического модулятора относительно первого опт- рона в точке С1 изменяется по закону
УС, 0,C,u R-t-u-sin(cot)-CD, (6) где R - рабочий радиус механического модулятора.
Шаг дискретизации механического модулятора.
, 2 irR
-Г
(7)
где N - число дискрет (щелей) механического модулятора.
Тогда частота импульсов, формируемых первым оптроНом, изменяется по закону
,: Vci CR+A-sin(cot) СО N
h
2 irR
.-fe-N,(8)
где fb ca/2 ir.
Частота импульсов, формируемых вторым оптроном, изменяется по аналогичному закону
(9)
,. R-i.sin(cat) ., ..
I рп --------- г g и «
сг- R
Из временной диаграммы (фиг. 36) следует, что моменты времени tj и Ц равны:
ti
о1/2+а+2-2/2
+ ЗДЛ i
2 WA
tri/2+Tc,+a+ &2/2+Tca
г 2
а - интервал времени между передними фронтами импульсов С1 и С2, формируемых первым 4 и вторым 5 оптронами соответственно;
и Т
c сг
периоды следования импульсов соответственно С1 и С2;
Т, - длительности импульсов С1
и С2; время постоянной задержки
рабочих импульсов относительно средней точки между центрами импульсов С1 и С2. Тогда период следования рабочих импульсов Tj., формируемых описанной схемой,равен
T, t,-t, fL4|W|.f..I|U,,,5
0
t,
4
сов
а 2
-.
Тс, -И
сг
(12).
Г 2 Частота следования рабочих импуль- 1 2
,;;i/fc2
/РХ т;%Тсг 1/f..+1/f /ч, i. I.i.4.
fc, +fca Обозначим , тогда
f с, sin(Qt) , sin(wt) , Л
R-H(13)
(14) (15)
где if -fg-N 5-f,,
Тогда вьшажение (13) с учетом (14) и (15)
f ,i+bf; sin(,(jt3.Llf Hjifi.sin totXL P fn+Af sin(QO+fM-&f sin(ut)
fg-uf2sin2 (.cot)
- fn ,
(16)
так как uf . sin (at)« f .
Таким образам, из выражения (16) следует, что влияние эксцентриситета механического модулятора на частоту следования рабочих импульсов fп исключено.
Структура регулятора 3 может быть практически любой для класса регуляторов, использующих в качестве сигнала обратной связи импульсы таходат- чика, связанного с валом электродви гателя, а в качестве задающего воздействия - частоту импульсов задающего генератора.
Использование изобретения позволяет достигнуть более высокрй точности стабилизации мгновенной ско7
рости вращения электродвигателя за счет более полного исключения влияния эксцентриситета механического модулятора на скорость вращения электродвигателя.
первого D-триггера, выход второго опт рона соединен с S-входом второго RS- триггера и входом второго элемента НЕ выход которого соединен с С-входом второго D-триггера, D-входы первого и второго D-триггеров соединены с шиной единичного логического сигнала.
Формула изобретения
R-входы первого и второго RS-триггеЦифровой электропривод постоянногою ров и R-входы первого и второго D- тока, содержащий электродвигатель триггеров соединены между собой, с постоянного тока, вал которого механически связан с импульсным датчиком скорости, вьтолненным в виде механического модулятора с первым и вторым
15 диаметрально расположенными оптронами, последовательно соединенные задающий генератор, регулятор, снабженный входом обратной связи, ключевой элемент, выходом подключенный к элект-20 родвигателю, RS-триггер, D-триггер, два элемента И, элемент ИЛИ и счетчик импульсов, отличающий- с я тем, что, с целью повышения точности стабилизации скорости за счет исключения влияния эксцентриситета механического модулятора, в него введены распределитель импульсов, второй RS-триггер, второй D-триггер, два элемента НЕ, третий и четвертый элементы И, причем выход первого оптрона соединен с S-входом первого RS-триг- гера и входом первого элемента НЕ, выход которого соединен с С-входом
25
30
R-входом счетчика импульсов, с выходом переполнения счетчика импульсов и с входом обратной связи регулятора, в.ь1ход задающего генератора соединен с входом распределителя импульсов, первый, второй, третий и четвертьм выходы которого соединены соответственно с первьми входами первого, третьего, второго и четвертого элементов И, прямые выходы первого и второго RS-Jpиггepoв соедине-т вы соответственно с вторыми входами первого и третьего элементов И, прямые выходы первого и второго D-триггеров соединены соответственно с вторыми входами второго и четвертого элементов И, выходы первого, второго, третьего и четвертого элементов И соединены соответственно с первым, вторым, третьим и четвертым входами элемента ИЛИ, выход которого соединен с информационным входом счетчика импульсов.
ct
iitt const
}S4h
. П/г .| ь п
14223А98
первого D-триггера, выход второго опт- рона соединен с S-входом второго RS- триггера и входом второго элемента НЕ, выход которого соединен с С-входом второго D-триггера, D-входы первого и второго D-триггеров соединены с шиной единичного логического сигнала.
я
ров и R-входы первого и второго D- триггеров соединены между собой, с
R-входом счетчика импульсов, с выходом переполнения счетчика импульсов и с входом обратной связи регулятора, в.ь1ход задающего генератора соединен с входом распределителя импульсов, первый, второй, третий и четвертьм выходы которого соединены соответственно с первьми входами первого, третьего, второго и четвертого элементов И, прямые выходы первого и второго RS-Jpиггepoв соедине-т вы соответственно с вторыми входами первого и третьего элементов И, прямые выходы первого и второго D-триггеров соединены соответственно с вторыми входами второго и четвертого элементов И, выходы первого, второго, третьего и четвертого элементов И соединены соответственно с первым, вторым, третьим и четвертым входами элемента ИЛИ, выход которого соединен с информационным входом счетчика импульсов.
Фиг.з
| УСТРОЙСТВО СТАБИЛИЗАЦИИ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 0 |
|
SU379029A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для приведения в действие, с переменным числом оборотов, многофазного асинхронного двигателя от многофазного коллекторного альтернатора, вращающегося постоянной скоростью | 1921 |
|
SU1335A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
