Изобретение относится к электротехнике и может быть использовано в цифровых высокочастотных приводах видеомагнитофонов.
Известен цифровой электропривод постоянного тока, содержащий импульсный датчик, измеритель частоты ращения, цифровой регулятор частоты, широтно-им- пульсный модулятор, преобразователь и накопитель младших разрядов.
Устройство позволяет регулировать (изменять) частоту вращения электродвигателя, однако имеет при этом достаточно большую пульсацию частоты вращения в установившемся режиме.
Цель изобретения - повышение точнот сти регулирования частоты вращения за счёт устранения систематической ошибки.
На фиг.1 представлена структурная электрическая схема электропривода постоянного тока; на фиг.2 - функциональная электрическая схема блока коррекции геометрической ошибки; на фиг.З - функциональная электрическая схема блока коррекции скорости.
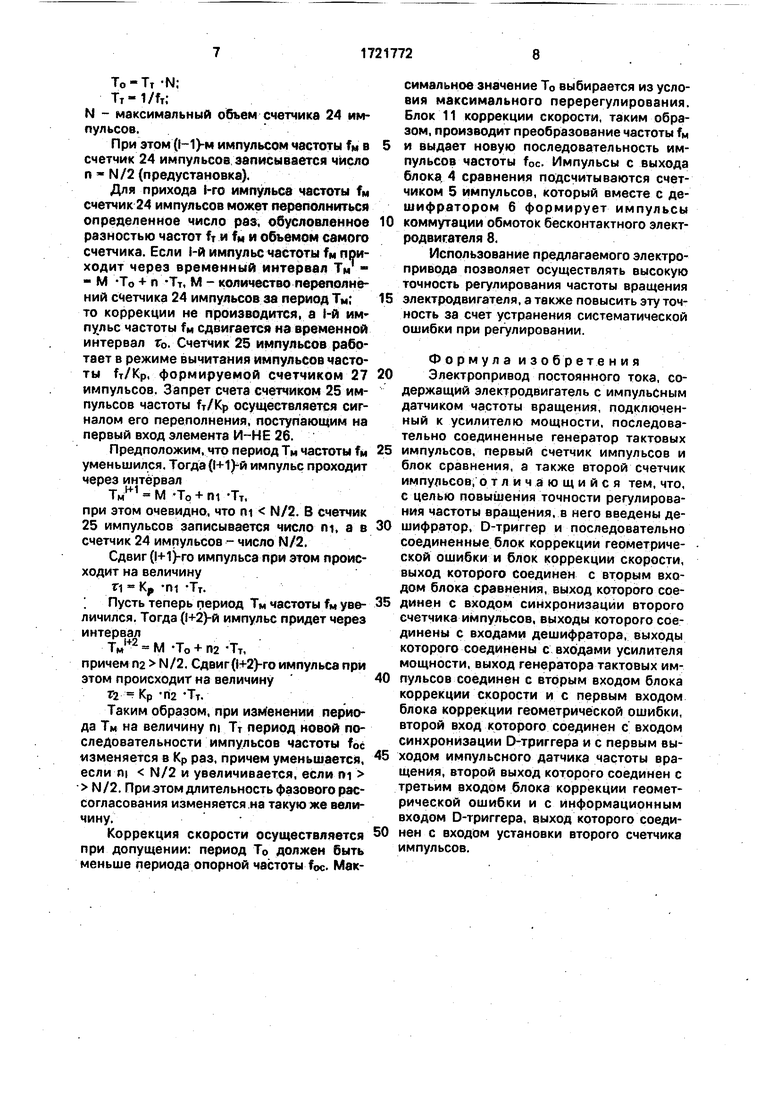
Электропривод постоянного тока (фиг.1) содержит импульсный датчик 1 частоты вращения, последовательно соединенные генератор 2 тактовых импульсов, первый счетчик 3 импульсов, блок 4 сравнения, второй счетчик 5 импульсов, дешифратор 6, усилитель 7 мощности и электродвигатель 8. Кроме того, электропривод содержит D-триг- гер 9, вход синхронизации которого соединен е вторым входом блока 10 коррекции геометрической ошибки, выход которого соединен с первым входом блока 11 коррекции скорости, выход которого соединён с вторым входом блока 4 сравнения. Выход генератора 2 тактовых импульсов соединен с вторым входом блока 11 коррекции скорости и с первым входом блока 10 коррекции геометрической ошибки, второй вход которого соединен с первым выходом импульсного датчика 1 частоты вращения, второй выход которого соединен с третьим входом .блока 10 коррекции геометрической ошибки и с информационным входом D-тригге- ра 9, выход которого соединен с входом установки второго счетчика 5 импульсов.
Импульсный датчик 1 частоты вращения (фиг,1) содержит модуляционно-растровый диск 12 и генераторы 13 и 14 счетных импульсов. Модуляционно-растровый диск 12 имеет одну информационную дорожку и жестко связан с валом электродвигателя 8, представляющего собой бесконтактный мо- ментный двигатель постоянного тока.
Блок 10 коррекции геометрической ошибки (фиг.2) содержит формирователь 15
импульсов, первый, второй и третий триггеры 16 - 18, элементы И-НЕ 19 и 20. выходы которых соединены с входами элемента ИЛИ-НЕ 21, выход которого соединен с
входом синхронизации счетчика 22 импульсов, выход которого соединен с входом синхронизации триггера 18, первый и второй выходы которого соединены соответственно с входом установки счетчика 22
0 импульсов и с выходом блока 10 коррекции геометрической ошибки, первый вход которого соединен с входом синхронизации триггера 16 и с первым входом элемента И-НЕ 19, второй вход которого соединен с
5 первым выходом триггера 17, второй выход которого соединен с первым входом элемента И-НЕ 20, второй вход которого соединен с выходом триггера 16. Второй вход блока 10 коррекции геометрической
0 ошибки соединен с входом формирователя 15 импульсов, выход которого соединен с входом установки триггера 18 и с входом установки триггера 17, вход синхронизации которого является третьим входом блока 10
5 коррекции геометрической ошибки.
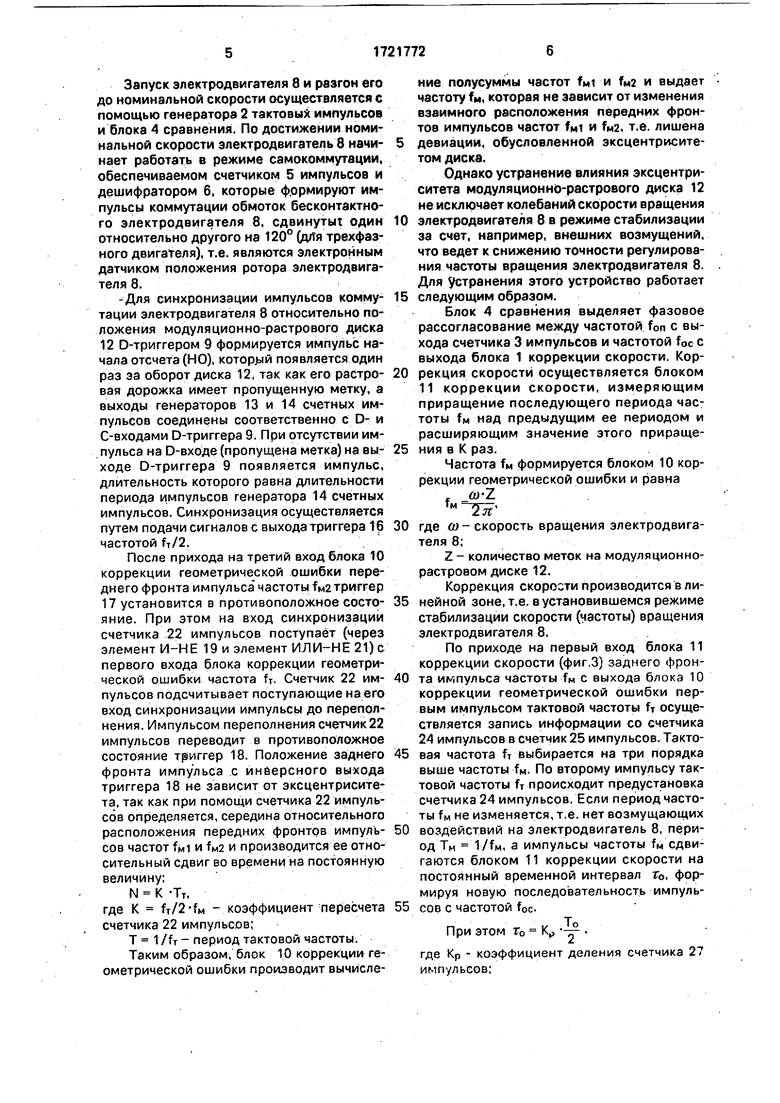
Блок 11 коррекции скорости (фиг.З) содержит последовательно соединенные распределитель 23 импульсов, Первый счетчик 24 импульсов, второй счетчик 25 импульсов
0 и элемент И-НЕ 26, второй вход которого соединен с выходом третьего счетчика 27 импульсов, вход которого является вторым входом блока 11 коррекции скорости и соединен с входом синхронизации счетчика 24
5 импульсов и с входом синхронизации распределителя 23 импульсов, второй выход которого соединен с входом управления второго счетчика 25 импульсов, вход синхронизации которого соединен с выходом
0 элемента И-НЕ 26. Вход установки распределителя 23 импульсов является первым входом блока 11 коррекции скорости, выходами которого является группа выходов счетчика 25 импульсов.
5 Электропривод работает следующим образом.
Модуляционно-растровый диск 12 им-з пульсногр датчика 1 частоты вращения жестко связан с валом электродвигателя 8.
0 Генераторы 13 и 14 счетных импульсов предназначены для преобразования углового перемещения модуля ционно-растрового диска 12 в пропорциональное количество импульсов. Оптроны генераторов 13 и 14 счетных
5 импульсов расположены по окружности мо- дуляционно-растроврго диска 12 на 180° один относительно другого и смещены на четверть шага растра, а растровая дорожка модуляционно-растрового диска 12 имеет (Z-1) метки, расположенные по окружности.
Запуск электродвигателя 8 и разгон его до номинальной скорости осуществляется с помощью генератора 2 тактовых импульсов и блока 4 сравнения. По достижении номинальной скорости электродвигатель 8 начи- нает работать в режиме самокоммутации, обеспечиваемом счетчиком 5 импульсов и дешифратором б, которые формируют импульсы коммутации обмоток бесконтактного электродвигателя 8, сдвинутыг один относительно другого на 120° (дЯя трехфазного двигателя), т.е. являются электронным датчиком положения ротора электродвигателя 8.
-Для синхронизации импульсов комму- тации электродвигателя 8 относительно положения модуляционно-растрового диска 12 D-триггером 9 формируется импульс начала отсчета (НО), который появляется один раз за оборот диска 12, так как его растре- вая дорожка имеет пропущенную метку, а выходы генераторов 13 и 14 счетных импульсов соединены соответственно с D- и С-входами D-триггера 9. При отсутствии импульса на D-входе {пропущена метка) на вы- ходе D-триггера 9 появляется импульс, длительность которого равна длительности периода импульсов генератора 14 счетных импульсов. Синхронизация осуществляется путем подачи сигналов с выхода триггера 16 частотой ft/2.
После прихода на третий вход блока 10 коррекции геометрической ошибки переднего фронта импульса частоты 1м2триггер 17 установится в противоположное состо- яние. При этом на вход синхронизации счетчика 22 импульсов поступает (через элемент И-НЕ 19 и элемент ИЛИ-НЕ21)с первого входа блока коррекции геометрической ошибки частота fT. Счетчик 22 им- пульсов подсчитывает поступающие на его вход синхронизации импульсы до переполнения. Импульсом переполнения счетчик 22 импульсов переводит в противоположное состояние триггер 18. Положение заднего фронта импульса с инверсного выхода триггера 18 не зависит от эксцентриситета, так как при помощи счётчика 22 импульсов определяется, середина относительного расположения передних фронтов импудь- сов частот fMi и fM2 и производится ее относительный сдвиг во времени на постоянную величину:
N К -Тт,
где К fT/2-fM - коэффициент пересчета счетчика 22 импульсов;
Т 1/fT- период тактовой частоты.
Таким образом, блок 10 коррекции геометрической ошибки производит вычислеfM ;
ние полусуммы частот fMt и fM2 и выдает частоту ft, которая не зависит от изменения взаимного расположения передних фронтов импульсов частот fMi и fM2, т.е. лишена девиации, обусловленной эксцентриситетом диска.
Однако устранение влияния эксцентриситета модуляционно-растрового диска 12 не исключает колебаний скорости вращения электродвигателя 8 в режиме стабилизации за счет, например, внешних возмущений, что ведет к снижению точности регулирования частоты вращения электродвигателя 8. Для устранения этого устройство работает следующим образом.
Блок 4 сравнения выделяет фазовое рассогласование между частотой f0n с выхода счетчика 3 импульсов и частотой foe с выхода блока 1 коррекции скорости. Коррекция скорости осуществляется блоком 11 коррекции скорости, измеряющим приращение последующего периода частоты fM над предыдущим ее периодом и расширяющим значение этого приращения в К раз.
Частота 1м формируется блоком 10 коррекции геометрической ошибки и равна ш-Z
Я
где (о - скорость вращения электродвигателя 8;
Z - количество меток на модуляционно- растровом диске 12.
Коррекция скорости производится в линейной зоне, т.е. в установившемся режиме стабилизации скорости (частоты) вращения электродвигателя 8.
По приходе на первый вход блока 11 коррекции скорости (фиг.З) заднего фронта импульса частоты fM с выхода блока 10 коррекции геометрической ошибки первым импульсом тактовой частоты fT осуществляется запись информации со счетчика 24 импульсов в счетчик 25 импульсов. Тактовая частота выбирается на три порядка выше частоты fM. По второму импульсу тактовой частоты fT происходит предустановка счетчика 24 импульсов. Если период частоты fM не изменяется, т.е. нет возмущающих воздействий на электродвигатель 8, период Тм 1/тм, а импульсы частоты fM сдвигаются блоком 11 коррекции скорости на постоянный временной интервал г0, формируя новую последовательность импульсов с частотой f0c.
При этом т0 К,, -- ,
где Кр - коэффициент деления счетчика 27 импульсов;
То-Тт-N;
Тт-Шт,N - максимальный объем счетчика 24 импульсов.
При этом (1-1 )-м импульсом частоты fM в счетчик 24 импульсов, записывается число n - N/2 (предустановка).
Для прихода 1-го импульса частоты fM счетчик 24 импульсов может переполниться определенное число раз, обусловленное разностью частот fr и TM и объемом самого счетчика. Если 1-й импульс частоты fM приходит через временный интервал Тм -М -То п -Тт, М - количество переполнений счетчика 24 импульсов за период Тм; то коррекции не производится, а 1-й импульс частоты fM сдвигается на временной интервал тъ. Счетчик 25 импульсов работает в режиме вычитания импульсов частоты fV/Kp, формируемой счетчиком 27 импульсов. Запрет счета счетчиком 25 импульсов частоты ТТ/КР осуществляется сигналом его переполнения, поступающим на первый вход элемента И-НЕ 26.
Предположим, что период Тм частоты fM уменьшился. Тогда (t+tyft импульс проходит через интервал
- М -То + Ш -Тт,
при этом очевидно, что щ N/2. В счетчик 25 импульсов записывается число ш, а в счетчик 24 импульсов - число N/2.
Сдвиг (1+1 j-ro импульса при этом происходит на величину
Л Кр -т -Тт.
; Пусть теперь период Тм частоты fM увеличился. Тогда (+2}-й импульс придет через интервал
Тм +2 М -То + п2 ;ТТ,
причем П2 N/2. Сдвиг(1+2)-то импульса при этом происходит на величину
Г2 Кр Ti2 Тт.
Таким образом, при изменении периода Тм на величину щ Тт период новой последовательности импульсов частоты foe изменяется в Кр раз, причем уменьшается, если щ N/2 и увеличивается, если щ
N/2. При этом длительность фазового рассогласования изменяется .на такую же величину.
Коррекция скорости осуществляется при допущении: период То должен быть меньше периода опорной частоты foe. Максимальное значение Т0 выбирается из условия максимального перерегулирования. Блок 11 коррекции скорости, таким образом, производит преобразование частоты fM
и выдает новую последовательность импульсов частоты foe- Импульсы с выхода блока 4 сравнения подсчитываются счетчиком 5 импульсов, который вместе с дешифратором 6 формирует импульсы
коммутации обмоток бесконтактного электродвигателя 8.
Использование предлагаемого электропривода позволяет осуществлять высокую точность регулирования частоты вращения
электродвигателя, а также повысить эту точность за счет устранения систематической ошибки при регулировании.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель с импульсным датчиком частоты вращения, подключенный к усилителю мощности, последовательно соединенные генератор тактовых
импульсов, первый счетчик импульсов и блок сравнения, а также второй счетчик импульсов, отличающийся тем, что, с целью повышения точности регулирования частоты вращения, в него введены дешифратор, D-триггер и последовательно соединенные блок коррекции геометрической ошибки и блок коррекции скорости, выход которого соединен с вторым входом блока сравнения, выход которого соединен с входом синхронизации второго счетчика импульсов, выходы которого соединены с входами дешифратора, выходы которого соединены с входами усилителя мощности, выход генератора тактовых импульсов соединен с вторым входом блока коррекции скорости и с первым входом блока коррекции геометрической ошибки, второй вход которого соединен с входом синхронизации D-триггера и с первым выходом импульсного датчика частоты вращения, второй выход которого соединен с третьим входом блока коррекции геометрической ошибки и с информационным входом D-триггера, выход которого соединен с входом установки второго счетчика импульсов.
.J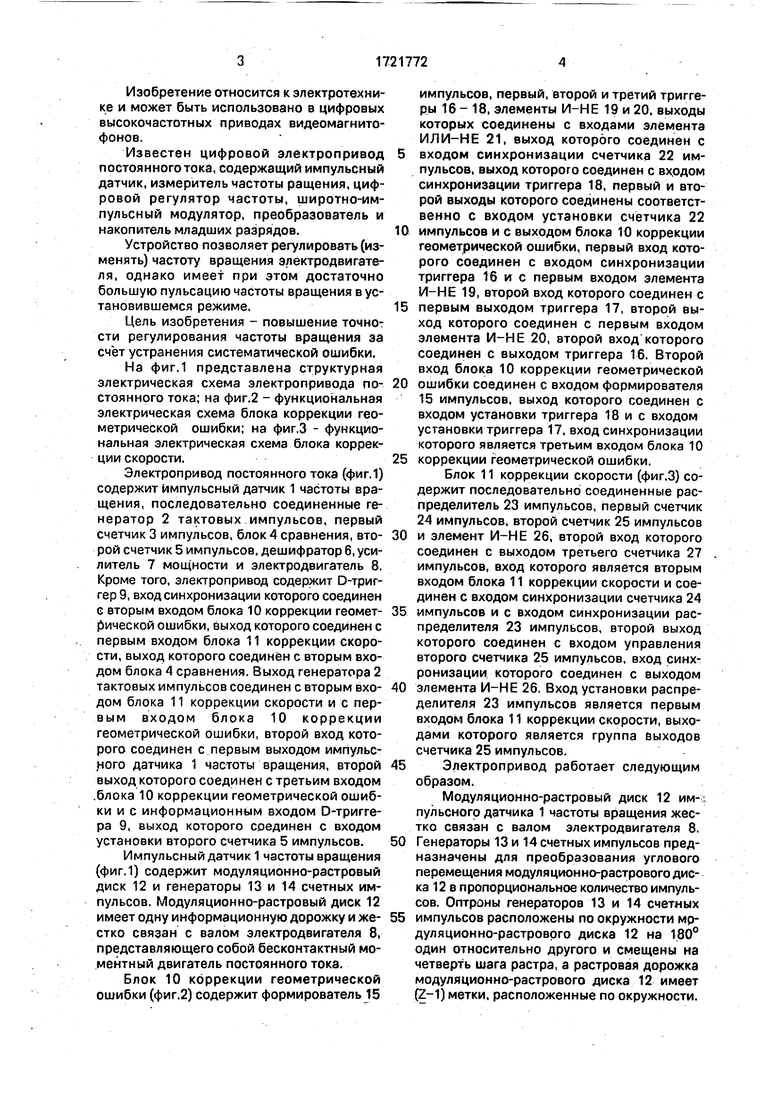
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2019032C1 |
| Диэлькометрический анализатор | 1990 |
|
SU1746280A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Устройство для управления подачей ножевого суппорта лущильного станка | 1988 |
|
SU1676804A1 |
| Устройство измерения частотных характеристик группового времени запаздывания четырехполюсников | 1988 |
|
SU1631511A1 |
| Стабилизированный электропривод | 1989 |
|
SU1624649A1 |
| Устройство для стабилизации скорости электродвигателя постоянного тока | 1989 |
|
SU1757074A1 |
| Электропривод постоянного тока | 1991 |
|
SU1781809A1 |
Изобретение относится к электротехнике, в частности к прецизионным электроприводам с синфазным вращением электродвигателя и может быть применено в системах автоматического регулирования приводами видеомагнитофонов. Целью изобретения является повышение точности регулирования частоты вращения за счет устранения систематической ошибки. Электропривод содержит электродвигатель 8 с импульсным датчиком 1 частоты вращения, подключенный к усилителю мощности 7. генератор 2 тактовых импульсов, два счетчика импульсов 3 и 5, блок сравнения 4, дешифратора 6, блок 10 коррекций геометрической ошибки, блок 11 коррекции скорости и соответствующие связи между ними. В данном устройстве на выходе блока 10 выделяется частота, которая не зависит от девитации частоты, обусловленной эксцентриситетом датчика 1. Это позволяет регулировать с большей точностью частоту вращения электродвигателя. 3 ил. fe 41 43 ч VI s Фиг.1
Фиг. 2
| Электропривод постоянного тока | 1989 |
|
SU1661955A1 |
