аа трубчатых костей.
Целью изобретения является повышение надежности заданного режима дистракции.
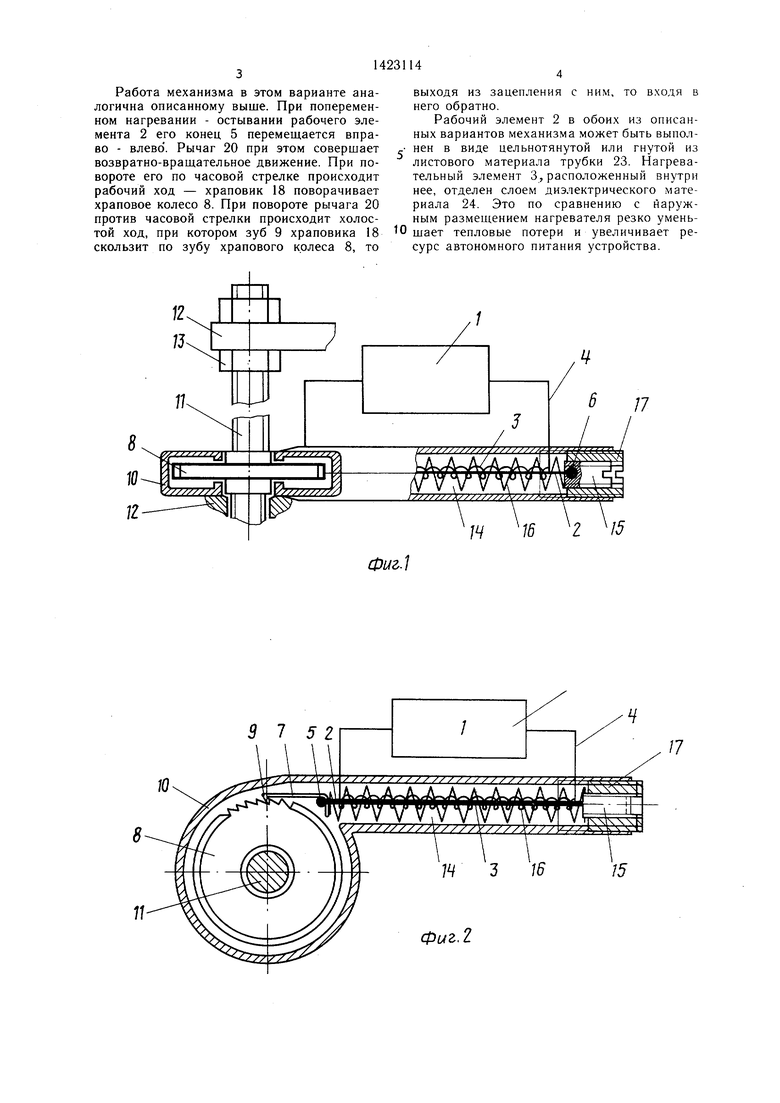
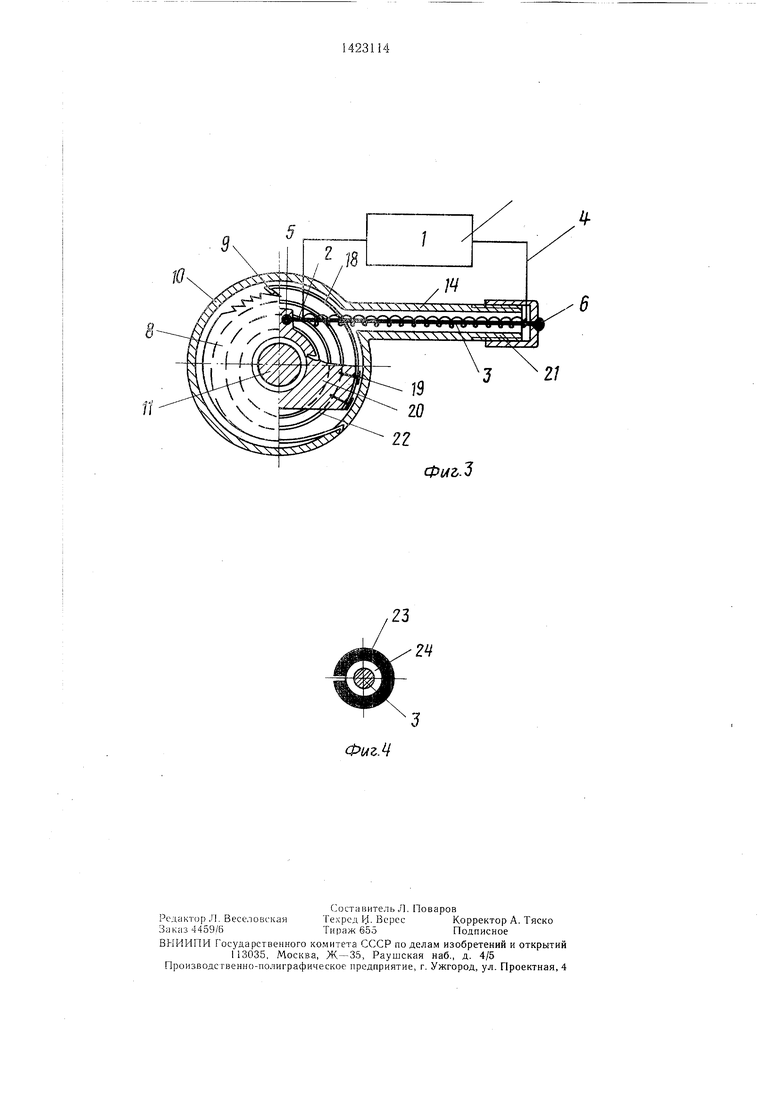
Ыа фкг. I изображен компрес- сиопно-дистракционного аппарата с приводным устройством, разрез; на фиг. 2 - при- водпое устройство, вид сверху; на фиг. 3 - то. же, вариант исполнения; на фиг. 4 - рабочий , вариант исполнения.
Устройство представляет собой блок 1 электрического управления и исполнительный механизм, содержандий рабочий элемент 2, снабженный нагревателем 3 из проволоки с высоким омическим сопротивлением, имеюпхим электрическую связь 4 с блоком I управления. Рабочий элемент 2 выполнен в виде проволоки из сплава никеля с титапом (нитинола) с температурой обратного мартенситного превращения, при которой происходит восстановление формы (и раз.меров), равной 50...80°С. Проволока имеет утолщения 5 и 6 на концах, одно из которых (утолн.1,ение 5) расположено в храповике 7, взаимодействующем с храповым колесом 8. Храповик 7 выполнен в виде пластинки, упруго поджатой к храповому колесу 8. На храповике 7 образован зуб 9, входящий в зацепление с храповы.м колесом 8. .Храповое колесо 8 расположено в корпусе 10 и имеет осевое резьбовое отверстие, взаимо- действу1он1,ее с резьбовым стержнем 11. Корпус 10 расг1оложен на одной из опор 12 а1п;арата, а резьбовой стержень 1 I гайками 13 соедип ен с другой опорой 12. Корнус И) имеет патрубок 14 для размещения рабо- тела 2, второй конен которого утол- 6, сопряжен с концом рег улировоч- кого винта 15, расноложени ого в конце патр-убла . В патрубке 14 соосно рабочему элементу 2 расположена винтовая пружина 16 сжатия, один конец которой упирается в :сснец храповика 7 с закреплен- пым на , тол1де11ием 5, а второй конем;, - в торец зи1-;та 17, замыкающего патрубок 14. При этом винт 15 с закрен- лечп ым в нем г;онцом 6 рабочего элемента 2 расположен в винте 17.
Таким образом,рабочий элемент 2, постоянно растянут пружиной 16. Ее опти- мальпое усилие устанавливают вращением зинта Г/ относительно регулировочного винта 15. В случае, когда пружина 16 из- готоале1-;а из материала, обладающего свойством сверхупругостк, необходимость в винте 57 отпадает, Taiv как такая пружина работает практически при постоянном уси- .11111. Ус1;;1ис i;a стал1м1ой пружине 16 за- BI-1CHT от ее хода. При рабсч - 1 ходе сталь- пая пружина 16 оказывает большее со- иротивление, чем пружина 16 из нитино- .;к-1 в состсяняк сверхупругости.
0
5
0
г
5
0
0
5
0
5
Уетройетво работает следующим образом.
Блок 1 управления по проводам 4 подает на нагреватель 3 импульс тока, длительность которого выбрана достаточной для полного прогрева рабочего элемента 2, растянутого пружиной 16, до температуры, при которой в нем происходит обратное мартен- ситное превращение. При нагреве рабочего элемента 2 до указанной температуры он начинает укорачиваться. При этом модуль упругости материала тела значительно увеличивается, за счет чего рабочее тело, сокращаясь, преодолевает сопротивление пружины 16, сжимая ее, и, кроме того, тянет за храповик 7, поворачивающий храповое колесо 8. Последнее, поворачиваясь вокруг лишенного возможности вращения резьбового стержня II, перемещает его вдоль оси на величину t/z, где t - шаг резьбы, а Z - число зубьев храпового колеса 8. После отключения блоком 1 управления тока, нитающего нагреватель 3, материал рабочего элемента 2 остывает и модуль его упругости уменьшается до прежнего значения, что позволяет пружине 16 снова растянуть его до прежних размеров. Храповик 7, соединенный с концом рабочего элемента 2, при этом перемещается против часовой стрелки, а его зуб 9 за счет упругости храповика 7, скользя по зубу храпового колеса 8, выходит из зацепления с ним, а затем опять входит. При подаче на нагревательный элемент 3 очередного импульса тока происходит следующий рабочий ход храповика 7, а после выключения тока - холостой ход.
Таким образом, при периодическом подключении и отключении тока в соответствии с программой,заложенной в блок 1 управления, происходит автоматическое перемещение резьбового стержня И, перемещающего, в свою очередь, опору 12 аппарата в связанный с ней костный фрагмент.
Показанный на фиг. 3 вариант выполнения предложенного аппарата отличается от описанного тем, что храповик выполнен в виде пластинки 18, консольно закрепленной винтами 19 на рычаге 20 и упруго охватывающей храповое колесо 8. Рычаг 20 установлен под храповым колесом 8 на одной оси с ним. Утолщение 5 рабочего элемента расположено на рычаге 20, утолщение 6 - на накидной гайке 21, что дополнительно уменьщает габарит механизма. Пружина, растягивающая рабочее тело, в этом случае выполнена в виде спирали 22, расположенной под рычагом 20 и соединенной одним концом с ним, а другим - с корпусом 10. Спираль 22, растягивая рабочий элемент 2, стремится повернуть рычаг 2 вместе с установленным на нем храпо.ви- ком 18 против часовой стрелки.
Работа механизма в этом варианте аналогична описанному выше. При попеременном нагревании - остывании рабочего элемента 2 его конец 5 перемещается вправо - влево . Рычаг 20 при этом совершает возвратно-вращательное движение. При повороте его по часовой стрелке происходит рабочий ход - храповик 18 поворачивает храповое колесо 8. При повороте рычага 20 против часовой стрелки происходит холостой ход, при котором зуб 9 храповика 18 скользит по зубу храпового колеса 8, то
выходя из зацепления с ним, то входя в него обратно.
Рабочий элемент 2 в обоих из описанных вариантов механизма может быть выполнен в виде цельнотянутой или гнутой из листового материала трубки 23. Нагревательный элемент 3, расположенный внутри нее, отделен слоем диэлектрического материала 24. Это по сравнению с наружным размещением нагревателя резко уменьшает тепловые потери и увеличивает ресурс автономного питания устройства.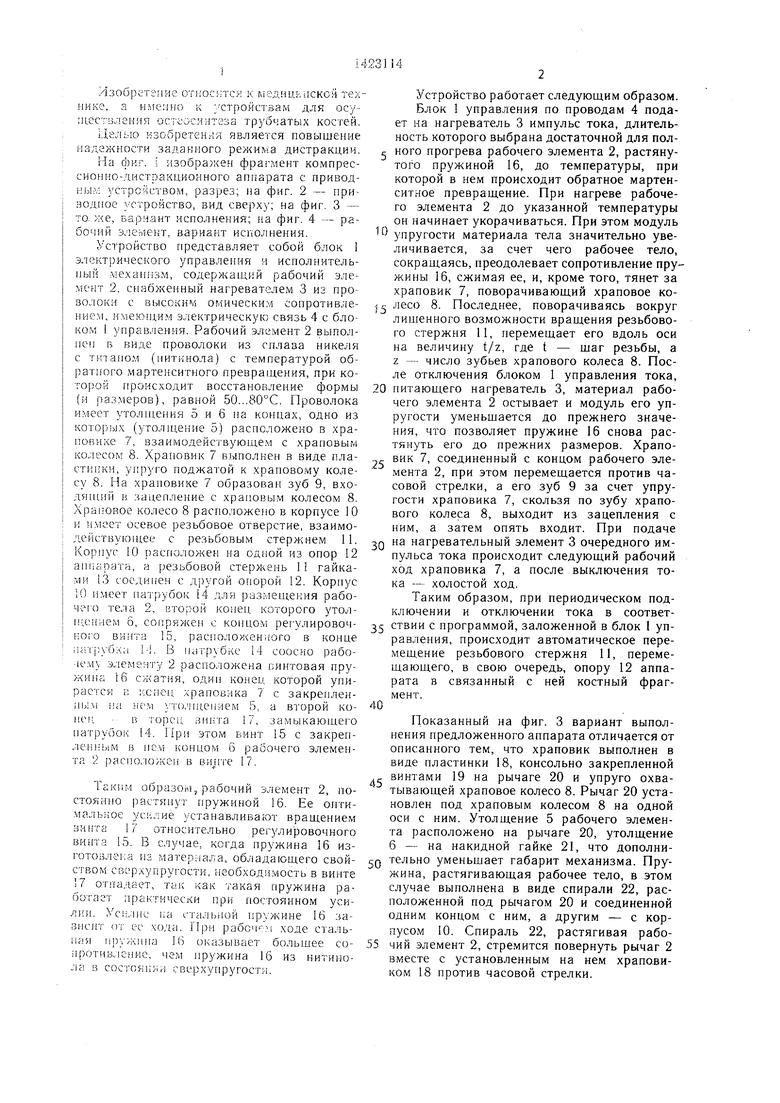

9 7 5Z
фиг.1
Фыг.2
W
yrnnnnryYYYr
J9 20
2/
.5
.
| Компрессионно-дистракционный аппарат | 1980 |
|
SU865284A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
