Фиг.1
Изобретение относится к транспортному мапшностроению и может быть использовано для управления колесными транспортными средствами в процессе торможения.
Цель изобретения - повышение устойчивости автопоезда при торможении.
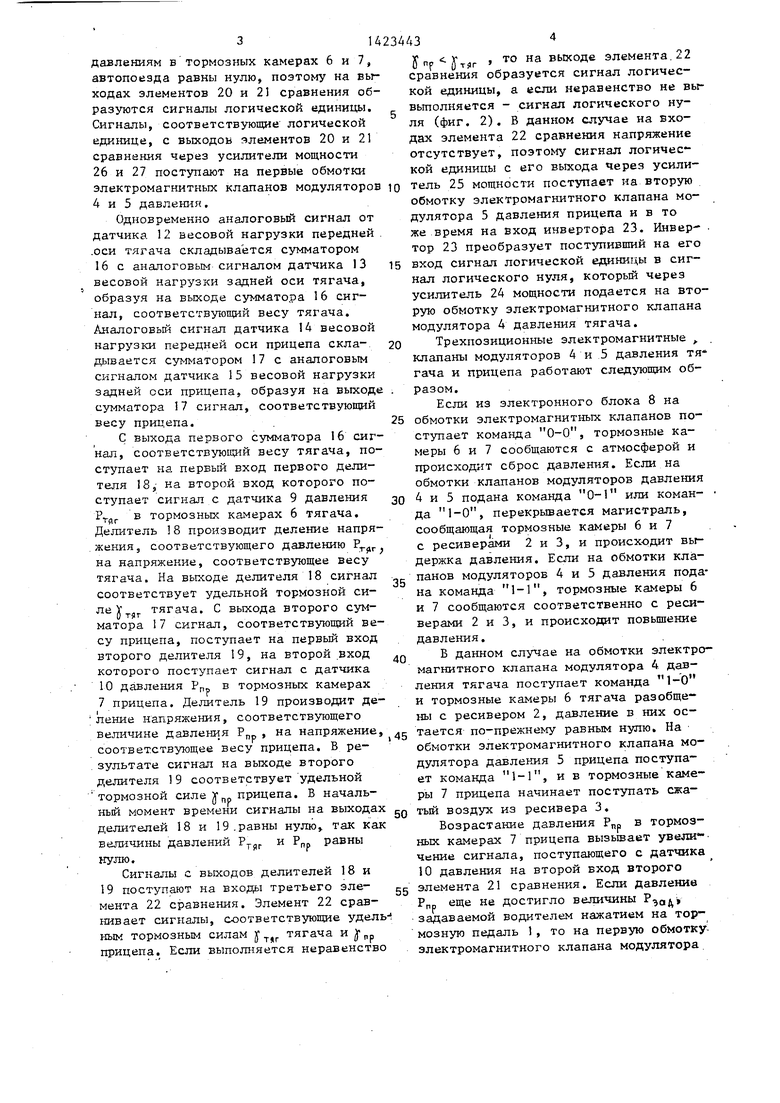
На фиг. 1 представлена принципиальная схема тормозного управления авто- поезда; на фиг. 2 - алгоритм сравнения сигналов в электронном блоке.
Тормозное управление автопоезда включается тормозной педалью . Тормозные контуры тягача и прицепа содер жат ресиверы 2 и 3 тягача и прицепа соответственно, через трехпозиционные электромагнитные клапаны модуляторов 4 и 5 давления тягача и прицепа со.рб- щенные с тормозными камерами 6 и У- тяга- чаи прицепа. Работой электромагнитных клапанов модуляторов 4 и 5 давления управляет электронный блок 8, входы которого соединены с выходами датчиков 9 и О давления в тормозных каме- pax 6 и 7 соответственно, датчика 1 перемещения тормозной педали 1, датчика 12 весовой нагрузки передней оси тягача датчика 13 весовой нагрузки задней оси тягача, датчика 4 весовой нагрузки передней оси прицепа, датчика 5 весовой нагрузки задней оси прицепа. Датчик 9 давления установлен у тормозных камер 6 тягача, а датчик 10 давления установлен у тормозных камер 7 прицепа. К входам первого сумматора 16 подключены вькоды датчиков 12 и 13 весовой нагрузки осей тягача, а к входам второго сумматора 17 - вьрсоды датчиков 14 и 15 нагрузки осей прицепа. К первому входу первого делителя 18 подключен выход первого сумматора 16, а к второму входу - выход датчика 9 давления. Выход второго сумматора 17 подсоединен к первому входу второго делителя 19, к второму входу которого подключен выход датчи ка 10 давления. Первые входы первого и второго элементов 20 и 21 сравнения подключены к выходу датчика I1 перемещения тормозной педали, а вторые входы - соответственно к выходам датчиков 9 и 10 давления в тормозных камерах тягача и прицепа. Выходы первого 18 и второго 19 делителей подсое- динены к входам третьего элемента 22 сравнения, выход которого через последовательно соединенные инвертор 23 и усилитель 24 мощности подключен к
0
0 5 0 с 0 д г
0
второй обмотке модулятора 4 давления тягача и через усилитель 25 мощности к второй обмотке модулятора 5 давления прицепа. Выходы первого 20 и второго 21 элементов, сравнения через усилители 26 и 27 мощности подключены соответственно к первым обмоткам модуляторов 4 тягача и 5 прицепа.
Тормозное управление автопоезда работает следующим образом.
При воздействии водителя на тормозную педаль 1 происходит включение электронного блока 8 контактами выклнг чателя стоп-сигнала (не показаны), Датчик 11 перемещения тормозной педали вьщает аналоговый электрический сигнал, пропорциональный усилию, прикладываемому водителем к педали 1. Этот сигнал соответствует дав лению , которое необходимо получить в тормозных камерах 6 и 7 для обеспечения торможения автопоезда с заданной водителем интенсивностью.
От датчика 11 перемещения тормозной педали сигнал поступает на первые входы элементов 20 и 21 сравнения, а на вторые входы этих элементов поступают сигналы от датчиков 9 и 10 давления. Аналоговый электрический сигнал, вьщаваемый датчиками 9 давления, соответствует давлению Р-гцг тормозньпс камерах 6 тягача и в момент начала торможения равен нулю. Аналоговый электрический сигнал, выдаваемый датчиками 10 давления, соответствует давлению в тормозных камерах 7 прицепа и в начальньй момент торможения . равен нулю.
Таким образом, в первом элементе 20 происходит сравнение сигнала, соответствующего давлению в тор-. мозных камерах тягача и сигнала, соответствующего задаваемому водителем давлению РЗС,Д . Если выполняется нера-. венство ,r . , первый элемент 20 сравнения выдает сигнал логиче.ской единицы, а если неравенство не вьшол- няется, элемент 20 вьздает сигнал ло- 1 ического нуля (фиг. 2). Второй элемент 21 сравнивает сигнал, соответствующий давлению в тормозных камерах 7 прицепа, и сигнал, соответству- юпщй давлению Если вьтолняется неравенство Р. .: , элемент 21 выдает сигнал логической единицы, а если не вьшолняется - сигнал логического нуля (фиг. 2). В момент начала торможения сигналы, соответствующие
3U
давлениям в тормозных камерах 6 и 7, автопоезда равны нулю, поэтому на выходах элементов 20 и 21 сравнения образуются сигналы логической единицы. Сигналы, соответствующие логической единице, с выходов элементов 20 и 21 сравнения через усилители мощности 26 и 27 поступают на первые обмотки
то на выходе элемента.22
S Г S -Tiir
сравнения образуется сигнал логической единицы, а если неравенство не вы вьтолняется - сигнал логического нуля (фиг. 2). В данном случае на входах элемента 22 сравнения напряжение отсутствует, поэтоьгу сигнал логичес кой единицы с его выхода через усили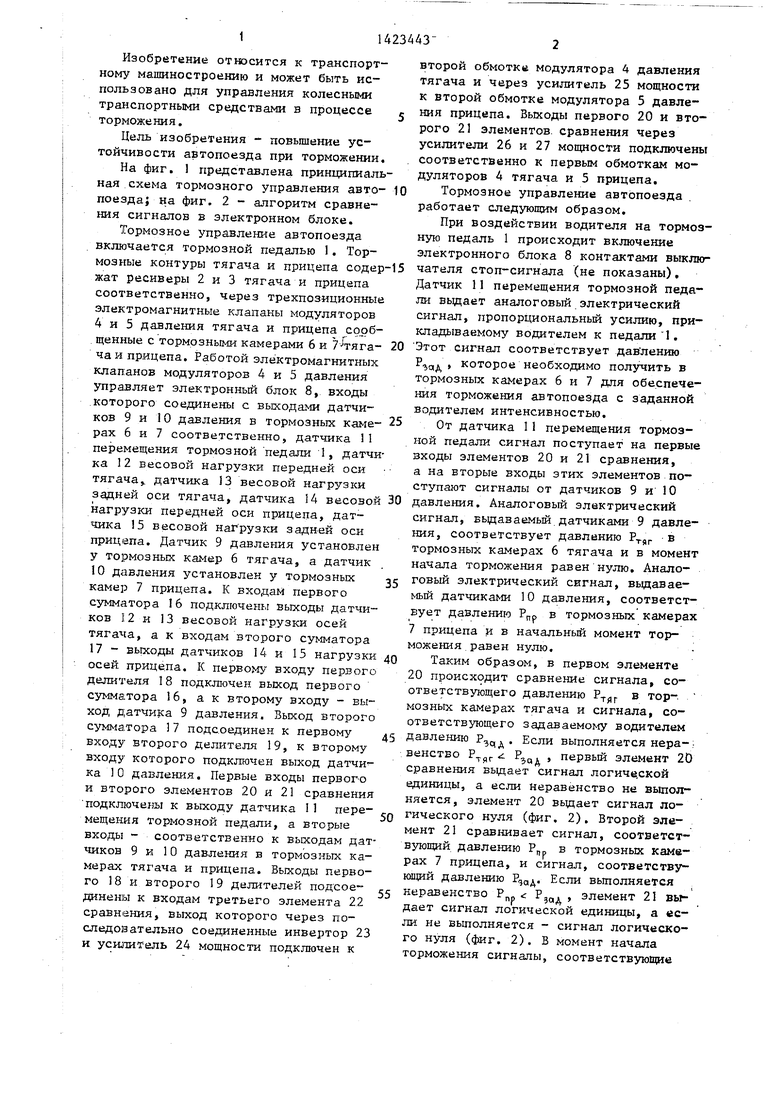
| название | год | авторы | номер документа |
|---|---|---|---|
| Тормозное управление автопоезда | 1988 |
|
SU1595716A1 |
| Тормозное управление многозвенного транспортного средства | 1983 |
|
SU1162648A1 |
| Электропневматическая тормозная система транспортного средства | 1979 |
|
SU854785A1 |
| Однопроводная электропневматическая тормозная система транспортного средства | 1983 |
|
SU1162647A1 |
| Электропневматическая тормозная система транспортного средства | 1981 |
|
SU1000320A2 |
| Электропневматическая тормозная система транспортного средства с тягово-сцепным устройством | 1980 |
|
SU925716A1 |
| Тормозная система автопоезда | 1989 |
|
SU1654068A1 |
| Электропневматическая тормозная система транспортного средства | 1981 |
|
SU998178A2 |
| Электропневматическая тормозная система транспортного средства | 1983 |
|
SU1134438A2 |
| Электропневматическая тормозная система транспортного средства | 1980 |
|
SU925715A1 |
Изобретение относится к многозвенным транспортным средствам и может быть использовано для управления автопоездами в процессе торможения. Цель изобретения - повьшение устойчивости автопоезда при торможении. Электронный блок (ЭБ) 8 управляет работой злектромагнитных клапанов 4 и 5 тормозных контуров тягача и прицепа. , ЭБ 8 включает в себя делители 18, 19 и злементы сравнения 20, 21, к входам которых через сумматоры 16, 17 подключены датчики 12, 13, 14, 15 нагрузки осей автопоезда, датчики 9, 10 давления в тормозных камерах 6, 7 и датчик 11 перемещения тормозной педали 1. Элемент 22 сравнивает сигналы, соответствующие удельным тормозным силам тягача и прицепа, поступающие к нему от делителей 18 и 19. Выход элемента 22 через элемент НЕ 23 соединен с обмоткой клапана 4 и непосредственно с обмоткой клапана 5. 2 ил. i (Л ю со litib СО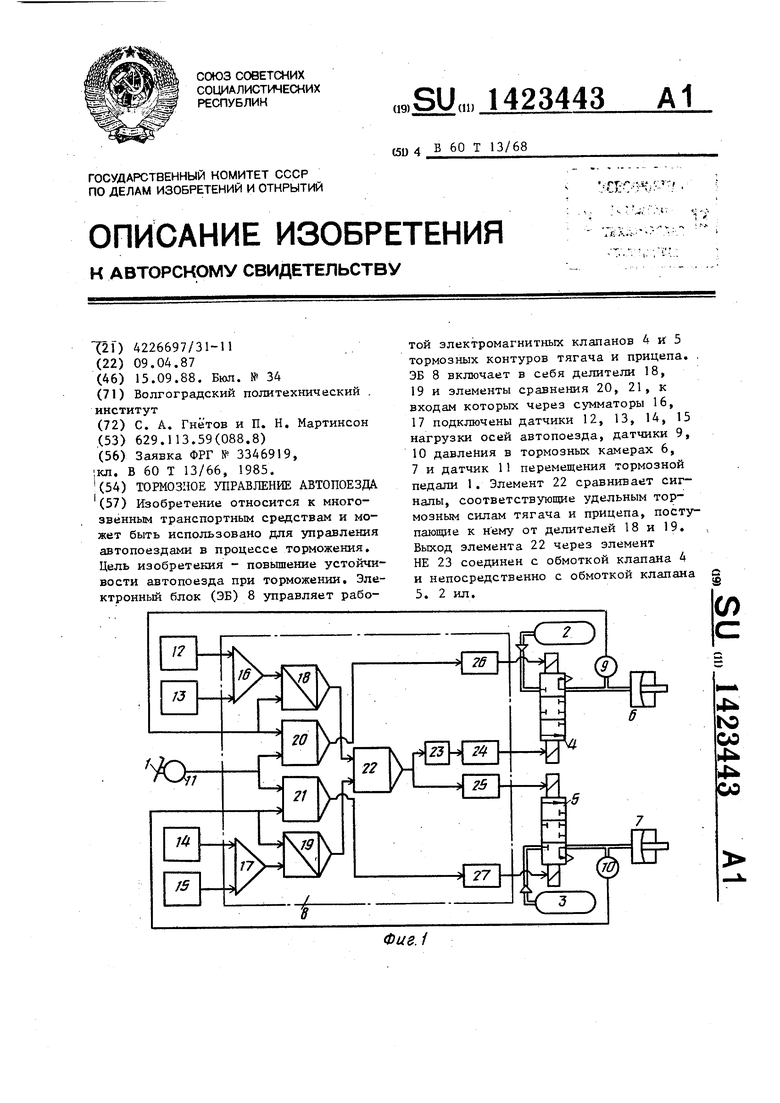
электромагнитных клапанов модуляторов ю тель 25 мощности поступает на вторую
4 и 5 дaвлeшiя.
Одновременно аналоговый сигнал от датчика 12 весовой нагрузки передней, .оси тягача складывается сумматором 16 с аналоговым сигналом датчика 13 весовой нагрузки задней оси тягача, образуя на выходе сумматора 16 сигнал, соответствующий весу тягача. Аналоговый сигнал датчика 14 весовой нагрузки передней оси прицепа скла-. дывается cy fмaтopoм 17 с аналоговым сигналом датчика 15 весовой нагрузки задней оси прицепа, образуя на выходе сумматора 17 сигнал, соответствующий весу прицепа.
С выхода первого сумматора 16 сигнал, соответствующий весу тягача, поступает на первый вход первого делителя 18,- на второй вход которого поступает сигнал с датчика 9 давления
обмотку электромагнитного клапана модулятора 5 давления прицепа и в то же время на вход инвертора 23. Инвертор 23 преобразует поступивший на его
15 вход сигнал логической единицы в сигнал логического нуля, который через усилитель 24 мощности подается на вто рую обмотку электромагнитного клапана модулятора 4 давления тягача.
20 Трехпозиционные электромагнитные клапаны модуляторов 4 и 5 давления тя гача и прицепа работают следующим образом.
Если из электронного блока 8 на
25 обмотки электромагнитных клапанов поступает команда 0-0, тормозные камеры 6 и 7 сообщаются с атмосферой и происходит сброс давления. Если на обмотки клапанов модуляторов давления 4 и 5 подана команда 0-1 или команда 1-0, перекрывается магистраль, сообщающая тормозные камеры 6 и 7 с ресиверами 2 и 3, и происходит выдержка давления. Если на обмотки клапанов модуляторов 4 и 5 давления пода на команда 1-1, тормозные камеры 6 и 7 сообщаются соответственно с ресиверами 2 и 3, и происходит повьппение давления.
30
тяг
в тормозных камерах 6 тягача.
Делитель 18 производит деление напря- жения, соответствующего давлению Р.. на напряжение, соответствующее весу тягача. На выходе делителя 18 сигнал соответствует удельной тормозной силе J, тягача. С выхода второго сумматора 17 сигнал, соответствующий весу прицепа, поступает на первый вход второго делителя 19, на второй .вход которого поступает сигнал с датчика 10 давления Рр в тормозных камерах 7 прицепа. Делитель 19 производит де- ление напряжения, соответствующего
величине давления Р„ , на напряжение, тается по-прежнему равным нулю. На соответствующее весу прицепа. В ре-обмотки электромагнитного клапана модулятора давления 5 прицепа поступает команда 1-1, и в тормозные камезультате сигнал на выходе второго
делителя 19 соответствует удельной
тормозной силе jfj, прицепа. В начальньй момент времени сигналы на выходах ый воздух из ресивера 3.
делителей 18 и 19.равны нулю, так какВозрастание давления „„
ры 7 прицепа начинает поступать ежавеличины давлений Р
Tflr
и Pp. равны
кулю.
Сигналы с выходов делителей 18 и 19 поступают на входы третьего элемента 22 сравнения. Элемент 22 срав- 1-швает сигналы, соответствующие уделЫ ным тормозным силам jf тягача и „р прицепа. Если выполняется неравенство
55
в тормозных камерах 7 прицепа вызь1вает увели- чение сигнала, поступающего с датчика 10 давления на второй вход второго элемента 21 сравнения. Если давление Ррр еще не достигло величины задаваемой водителем нажатием на тормозную педаль 1 , то на первую обмотку. электромагнитного клапана модулятора
обмотку электромагнитного клапана модулятора 5 давления прицепа и в то же время на вход инвертора 23. Инвер . тор 23 преобразует поступивший на его
5 вход сигнал логической единицы в сигнал логического нуля, который через усилитель 24 мощности подается на вторую обмотку электромагнитного клапана модулятора 4 давления тягача.
0 Трехпозиционные электромагнитные клапаны модуляторов 4 и 5 давления тя гача и прицепа работают следующим образом.
Если из электронного блока 8 на
5 обмотки электромагнитных клапанов поступает команда 0-0, тормозные камеры 6 и 7 сообщаются с атмосферой и происходит сброс давления. Если на обмотки клапанов модуляторов давления 4 и 5 подана команда 0-1 или коман да 1-0, перекрывается магистраль, сообщающая тормозные камеры 6 и 7 с ресиверами 2 и 3, и происходит выдержка давления. Если на обмотки клапанов модуляторов 4 и 5 давления подана команда 1-1, тормозные камеры 6 и 7 сообщаются соответственно с ресиверами 2 и 3, и происходит повьппение давления.
Б данном случае на обмотки электромагнитного клапана модулятора 4 давления тягача поступает команда 1-0 и тормозные камеры 6 тягача разобщены с ресивером 2, давление в них ос0
5
0
ры 7 прицепа начинает поступать ежаВозрастание давления „„
5
в тормозных камерах 7 прицепа вызь1вает увели- чение сигнала, поступающего с датчика 10 давления на второй вход второго элемента 21 сравнения. Если давление Ррр еще не достигло величины задаваемой водителем нажатием на тормозную педаль 1 , то на первую обмотку. электромагнитного клапана модулятора
5
5 давления прицепа поступает сигнал, соответствующий логической единице. Так как в тормозных камерах 6 тягача величина давления не изменилась, ос- таются неизменными и сигнал логической единицы на первой обмотке электромагнитного клапана модулятора 4 давления тягача и нулевой сигнал на одном входе элемента 22 сравнения. На другой вход этого элемента поступает отличный от нуля сигнал, ветствующий удельной тормозной силе
прицепа. Неравенство л не выполняется, поэтому на вьпсоде элемента 22 сравнения образуется сигнал логического нуля, которьй через усилитель 25 поступает на вторую обмотку электромагнитного клапана модулятора 5 давления прицепа. После инвер- 20 к входам Которого подключены датчики тирования элементом 23 логический нуль преобразуется в логическую единицу и усиленный сигнал поступает на вторую обмотку электромагнитного клапана модулятора 4 давления тягача. По команде 1-1 электромагнитный
I клапан модулятора 4 давления тягача
I сообщает тормозные камеры 6 тягача с ресивером 2 тягача. Электромагнитный
давления в тормозных камерах, датчи- весовой нагрузки тягача и прицепа и датчик перемещения тормозной педали, отличающееся тем, 25 что, с целью повьпаения устойчивости автопоезда при торможении, модуляторы давления выполнены трехфазными, а электронный блок включает в себя элементы сравнения, делители и инвертор.
клапан модулятора 5 давления прицепа, ЗО при этом датчик перемещения тормозной
получив команду Г-0, перекрывает магистраль, сообщающую тормозные камеры 7 прицепа с ресивером 3 прицепа. Изменение давления в тормозных камерах фиксируется датчиками давления сигналы от которых поступают в электронный блок 8 управления. Работа тормозного управления продолжается в описанной последовательности.
Тормозное управление автопоезда в течение всего процесса торможения осуществляет согласование удельных тормозных сил тягача и прицепа, что
педали подключен к первым входам первого и второго элементов сравнения, выходы которых связаны с первыми обмотками модуляторов соответственно
эс тягача и прицепа, датчики давления в тормозных камерах тягача и прицепа подключены соответственно к вторым входам первого и второго элементов сравнения и к первым входам первого
40 и второго делителей, к вторым входам которых подключены соответственно датчики весовой нагрузки тягача и прицепа, выходы делителей подключены к входам третьего элемента сравнения.
обеспечивает отсутствие усилий в сцепке и, соответственно, устойчивое тор- jвыход которого связан с второй обмот- можение,.кой модулятора давления прицепа и
При оттормаживакии сигнал, пропор-посредством инвертора с второй обмот-
циональный д1еремещению тормозной пе-кой модулятора давления тягача.
дали 1, уменьшается, что приводит к снижению давления в тормозных камерах 6 и 7 автопоезда, но и при этом тормозное управление поддерживает равенство удельных тормозных сил тягача и прицепа. При полностью отпущенной тормозной педали I происходит отключение питания электронного блока 8 контактами выключателя стоп-сигнала.
Формула изобретения
Тормозное управление автопоезда, содержащее тормозные контуры тягача J и прицепа, в которых тормозные камеры подключены к ресиверам посредством модуляторов давления с электромагнитными клапанами, управляемыми блоком.
к входам Которого подключены датчики
давления в тормозных камерах, датчи- весовой нагрузки тягача и прицепа и датчик перемещения тормозной педали, отличающееся тем, что, с целью повьпаения устойчивости автопоезда при торможении, модуляторы давления выполнены трехфазными, а электронный блок включает в себя элементы сравнения, делители и инвертор.
педали подключен к первым входам первого и второго элементов сравнения, выходы которых связаны с первыми обмотками модуляторов соответственно
тягача и прицепа, датчики давления в тормозных камерах тягача и прицепа подключены соответственно к вторым входам первого и второго элементов сравнения и к первым входам первого
и второго делителей, к вторым входам которых подключены соответственно датчики весовой нагрузки тягача и прицепа, выходы делителей подключены к входам третьего элемента сравнения.
выход которого связан с второй обмот- кой модулятора давления прицепа и
Cfpoc Выдержка Подъен
ЭлектронвгнитныЛ кмпан тягача
CSpoc Выдерзкха Подьен
Электромагнитный клапан прицела
| Заявка ФРГ № 3346919, 1КЛ | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
