/ 76
.20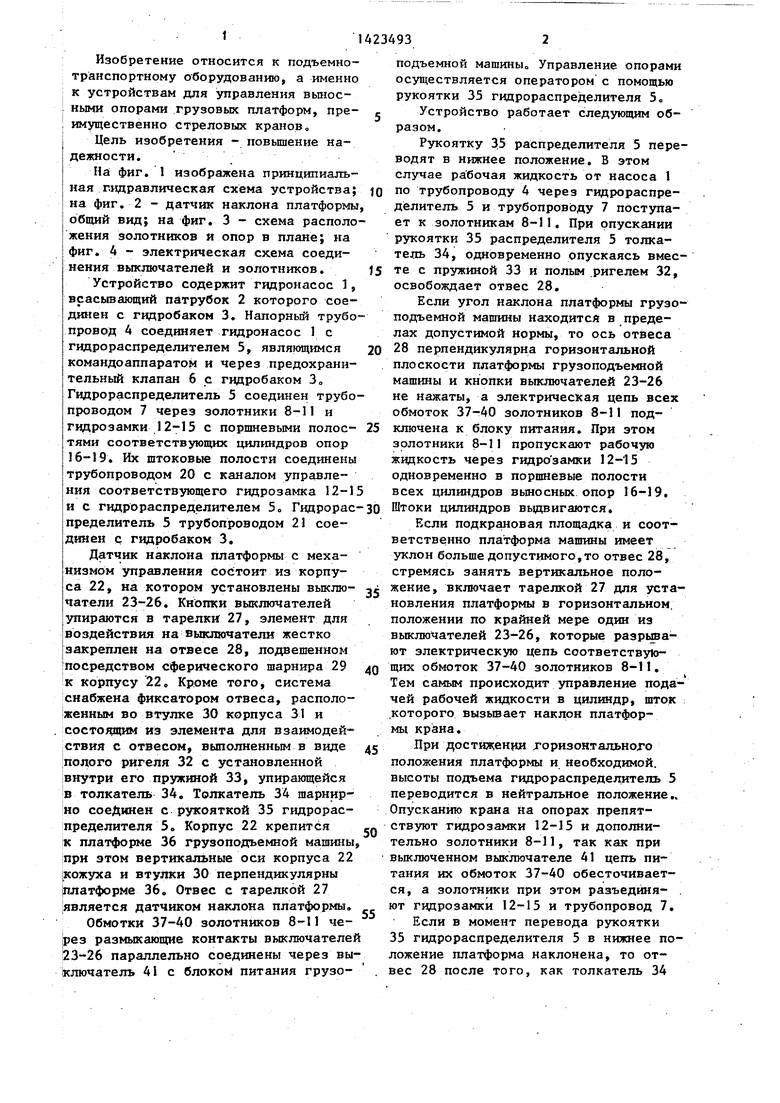
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления выносными опорами платформы | 1982 |
|
SU1039863A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| ГИДРОПРИВОД ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2004 |
|
RU2272933C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СКВАЖИННОГО НАСОСА | 2022 |
|
RU2788797C1 |
| Устройство управления положением рамы транспортного средства | 1990 |
|
SU1808744A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Способ добычи высоковязкой нефти на малых глубинах и устройство для его осуществления | 2020 |
|
RU2754247C1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
| Гидропривод грузовой лебедки стрелового самоходного крана | 1979 |
|
SU867852A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
Изобретение относится к области подъемно-транспортного оборудования, а именно к устройствам для управления вьшосными опорами грузовых платформ, например кранов. Цель изобретения - повышение надежности. Гидронасос 1 через гидрораспределитель 5, золотники 8-11 и гидрозамки 12-15 подключен к цилиндрам 16-19 выносных опор. При управлении гидрораспределителем 5 с учетом сигналов датчика наклона платформы получают питание цилиндры 16-19 и кран вьютавляет- ся на опоры. 4 ил.
. ipup.t
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления вьшос- ными опорами грузовых платформ, пре- имущественно стреловых кранов.
Цель изобретения - повышение надежности.
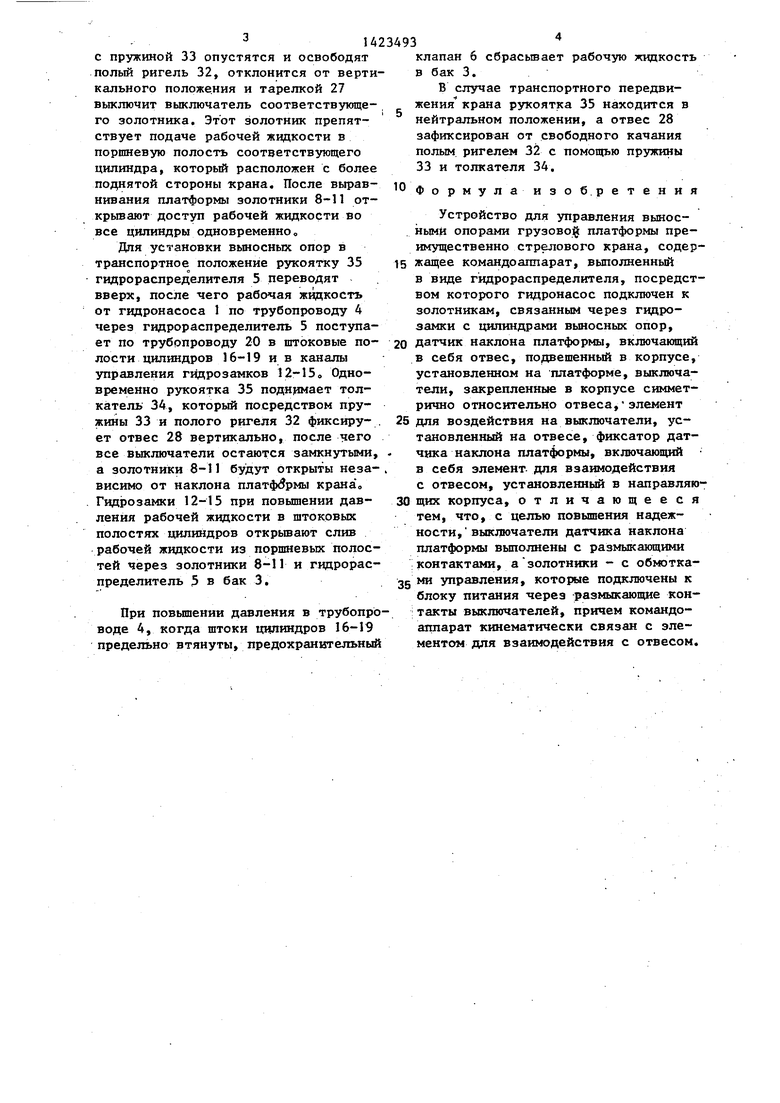
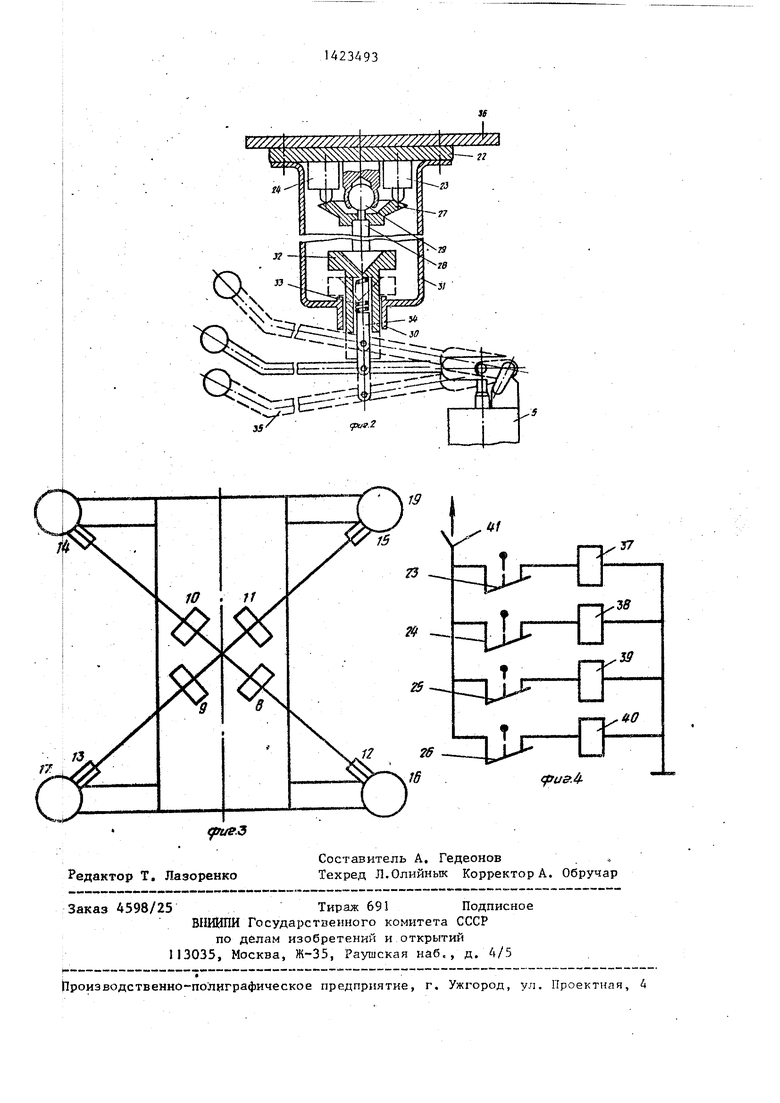
Hai фиг. 1 изображена принципиальная гидравлическая схема устройства; на фиг. 2 - датчик наклона платформы общий вид; на фиг. 3 - схема расположения золотников я опор в плане; на фиг. 4 - электрическая схема соединения выключателей и золотников.
Устройство содержит гидронасос 1, всасывающий патрубок 2 которого соединен с гидробаком 3. Напорный трубопровод 4 соединяет гидронасос 1с гидрораспределителем 5, являющимся командоаппаратом и через предохранительный клапан 6 с гидробаком 3 Гидрораспределитель 5 соединен трубопроводом 7 через золотники 8-11 и гццрозамки 12-15 с поршневыми полос- тями соответствующих цилиндров опор 16-19. Их штоковые полости соединены трубопроводом 20 с каналом управления соответствующего гидрозамка 12-15 и с гидрораспред(елителем 5. Гидрораспределитель 5 трубопроводом 21 соединен с гидробаком 3.
Датчик наклона платформы с механизмом управления состоит из корпуса 22, на котором установлены выклю- чатели 23-26. Кнопки выключателей упираются в тарелки 27, элемент для воздействия на выключатели жестко закреплен на отвесе 28, подвешенном посредством сферического шарнира 29 к корпусу 22. Кроме того, система снабжена фиксатором отвеса, располо- iжeнным во втулке 30 корпуса 31 и СОСТ01ЩИМ из элемента для взаимодействия с отвесом, выполненным в виде |подого ригеля 32 с установленной внутри его пружиной 33, упирающейся в толкатель 34, Толкатель 34 шарнир- но соединен с рукояткой 35 гидрораспределителя 5. Корпус 22 крепится к платформе 36 грузоподьемной машины, :при этом вертикальные оси корпуса 22 :кожуха и втулки 30 перпендикулярны платформе 36. Отвес с тарелкой 27 является датчиком наклона платформы. Обмотки 37-40 золотников 8-11 че- размыкающие контакты выключателей 23-26 параллельно соединены через выключатель 41 с блоком питания грузоподъемной машины Управление опорами осуществляется оператором с помощью рукоятки 35 гвдрораспределителя 5«
Устройство работает следующим образом.
Рукоятку 35 распределителя 5 переводят в нижнее положение. В этом случае рабочая жидкость от насоса 1 по трубопроводу 4 через гидрораспре- дёлитель 5 и трубопроводу 7 поступает к золотникам 8-11. При опускании рукоятки 35 распределителя 5 толкатель 34, одновременно опускаясь вместе с пружиной 33 и полым ригелем 32, освобождает отвес 28.
Если угол наклона платформы грузоподъемной мащины находится в пределах допустимой нормы, то ось отвеса 28 перпендикулярна горизонтальной плоскости платформы грузоподъемной машины и кнопки выключателей 23-26 не нажаты, а электрическая цепь всех обмоток 37-40 золотников 8-11 подключена к блоку питания. При этом золотники 8-11 пропускают рабочую жидкость через гидро замки 12-15 одновременно в поршневые полости всех цилиндров выносньк опор 16-19. Штоки цилиндров выдвигаются.
Если подкрановая площадка и соответственно платформа машины имеет уклон больше допустимого,то отвес 28, стремясь занять вертикальное положение, включает тарелкой 27 для установления платформы в горизонтальном, положении по крайней мере один из выключателей 23-26, которые разрьша- ют электрическую цепь соответствующих обмоток 37-40 золотников 8-11. Тем самым происходит управление пода чей рабочей жидкости в цилиндр, шток .которого вызывает наклон платформы крана.
Дри достижении горизонтального положения платформы и необходимой, высоты подъема гидрораспредедитеяь 5 переводится в нейтральное положение.. Опусканию крана на опорах препятствуют гидрозамки 12-15 и дополнительно золотники 8-J1, так как при выключенном выключателе 41 цепь питания их обмоток 37-40 обесточивается, а золотники при этом разъединя- ют гвдрозамки 12-15 и трубопровод 7.
Если в момент перевода рукоятки 35 гидрораспределителя 5 в нижнее положение платформа наклонена, то отвес 28 после того, как толкатель 34
с пружиной 33 опустятся и освободят полый ригель 32, отклонится от вертикального положения и тарелкой 27 выключит выключатель соответствующего золотника. Этот золотник препятствует подаче рабочей жидкости в поршневую полость соответствующего цилиндра, который расположен с более поднятой стороны крана. После вьфав- нивания платформы золотники 8-11 от- крьгоают доступ рабочей жидкости во все цилиндры одновременно с
Для установки вьшосных опор в транспортное положение рзгкоятку 35 гидрораслределителя 5 переводят вверх, после -чего рабочая жидкость от гидронасоса 1 по трубопроводу 4 через гидрораспределитель 5 поступает по трубопроводу 20 в штоковые полости цилиндров 16-19 ив каналы управления гидрозамков 12-15 Одновременно рукоятка 35 подн|о ает толкатель 34, который посредством пружины 33 и полого ригеля 32 фиксиру- ет отвес 28 вертикально, после чего все выключатели остаются замкнутыми, а золотники 8-11 будут открыты независимо от наклона платф рмы крана . Гидрозамки 12-15 при повышении давления рабочей жидкости в штоковых полостях цилиндров открьшают слив рабочей жидкости из поршневых полостей через золотники 8-11 и гидрораспределитель 5 в бак 3.
При повышении давления в трубопроводе 4, когда штоки цилиндров 16-19 предельно втянуты, предохранительный
клапан 6 сбрасьтает рабочую жидкость в бак 3.
В случае транспортного передвижения крана рукоятка 35 находится в нейтральном положении, а отвес 28 зафиксирован от свободного качания полым ригелем 32 с помощью пружины 33 и толкателя 34.
Формула изоб.ретения
Устройство для управления выносными опорами грузово1§ платформы преимущественно стрелового крана, содер15 жащее командоаппарат, выполненный в виде гидрораспределителя, посредством которого гидронасос подключен к золотникам, связанным через гидрозамки с цилиндрами выносных опор,
20 датчик наклона платформы, включакиций в себя отвес, подвешенный в корпусе, установленном на платформе, выключатели, закрепленные в корпусе симметрично относительно отвеса, злемент
25 для воздействия на выключатели, установленный на отвесе, фиксатор датчика наклона платформы, включающий в себя злемент. для взаимодействия с отвесом, установленный в направляю30 щих корпуса, отличающееся тем, что, с целью повышения надежности, выключатели датчика наклоиа платформы выполнены с размыкающими :контактами, а золотники - с обмотка35 ми управления, подключены к блоку питания через размыкающие кон- :такты выключателей, причем командоаппарат кинематически связан с элементом для взаимодействия с отвесом.
3S
у10 . 11
П
У////////7/
ttl
73
Т
qj
J7
ff
38
3ff
г$
Jifff
.U
| Система управления выносными опорами платформы | 1982 |
|
SU1039863A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
