Изобретение относится к системам управления выносными опорами самоходных машин, преимущественно стреловых кранов.
Известна система упрявления выносными опорами платформы, преимущественно крана, содержащая датчик для определения наклона платформы, связанный с механизмом управления гидроцилиндрами опор, насос, всасывающий патрубок которого соединен с гидробаком, напорный и сливной трубопроводы, связанные с распределителем, клапаны 1.
Недостатками известной системы являются сложность и сравнительно низкая надежность работы.
Цель изобретения - упрощение конструкции и повыщение надежности работы системы.
Цель достигается тем, что в системе управления выносными опорами платформы, преимущественно крана, содержащей датчик для определения наклона платформы, связанный с механизмом управления гидроцилиндрами опор, насос, всасывающий патрубок которого соединен с гидробаком, напорный и сливной трубопроводы, связанные с распределителем, клапаны, датчик для определения наклона платформы представляет собой подвешенный посредством сферического шарнира к вертикально расположенному корпусу отвес с жестко прикрепленной к нему тарелкой, при этом механизм управления гидроцилиндрами опор представляет собой установленные в корпусе с возможностью взаимодействия с тарелкой подпружиненные золотники, а корпус выполнен с вертикальными каналами, один из которых сообщен через распределитель с напорным трубопроводом, а другие сообщены с гидроцилиндрами и через золотники - с первым каналом.
Кроме того, система управления выносными опорами платформы крана может быть снабжена приспособлением для фиксации отвеса, включающим в себе гидроцилиндр, шток которого выполнен полым, и в этой полости установлен подпружиненный фиксатор.
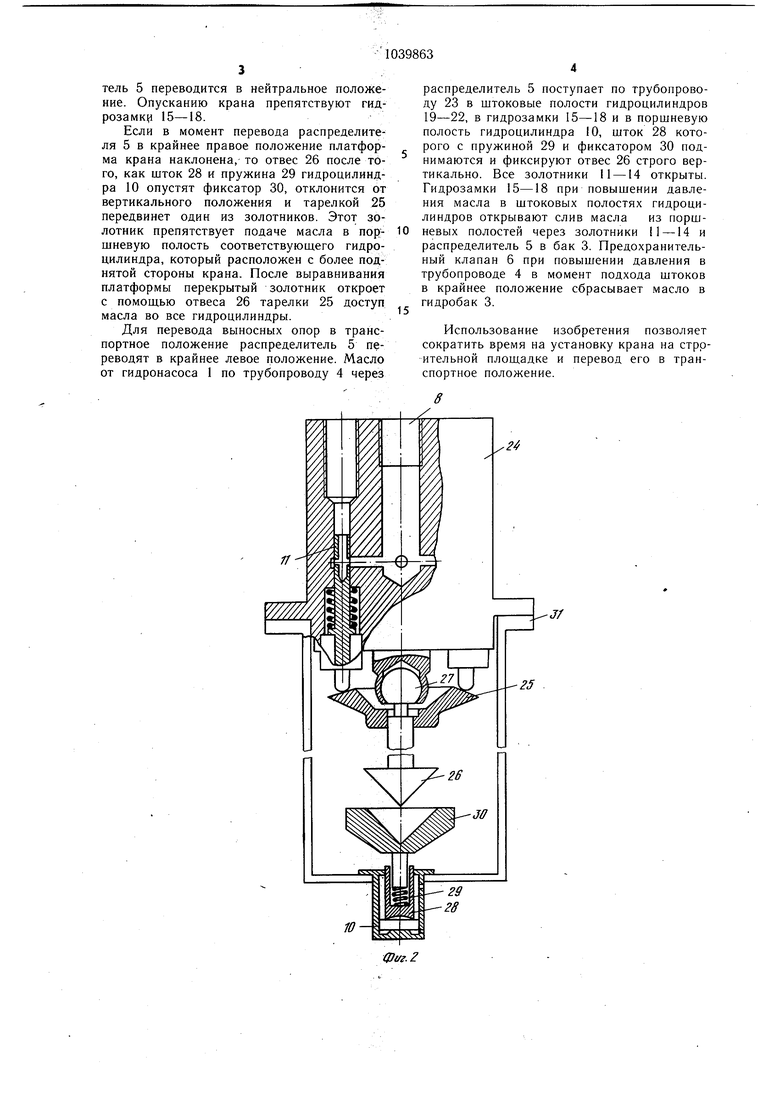
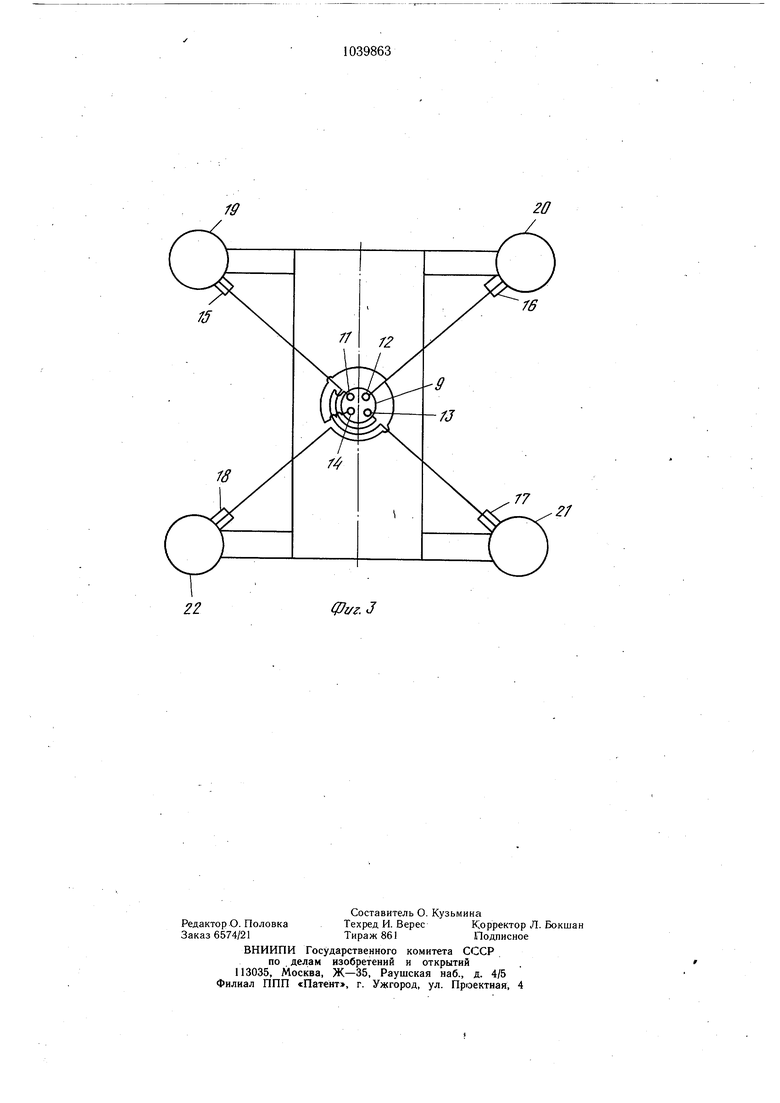
На фиг. 1 изображена принципиальная схема системы управления выносными опорами; на фиг. 2 - датчик для определения наклона платформы, связанный с механизмом управления гидроцилиндрами опор; на фиг. 3 - схема соединения механизма управления гидроцилиндрами опор с гидроцилиндрами.
Система управления включает в себя гидронасос 1, всасывающий патрубок 2 которого соединен с гидробаком 3. Напорный трубопровод 4 связывает гидронасос 1 с распределителем 5 и через предохранительный клапан 6 с гидробаком 3. Распределитель 5 параллельно связан трубопроводом 7 с каналом 8 (фиг. 2) механизма 9 управления гидроцилиндрами и штоковой полостью гидроцилиндра 10 приспособления для фиксации. Канал 8 через золотники 11 - 14 и гидрозамки 15-18 соединяется с порщневыми полостями соответствующих гидроцилиндров выносных опор 19-22 (фиг. 3). Их штоковые полости соединены трубопроводом 23 с распределителем 5, поршневой полостью гидроцилиндра 10 и гидрозамками 15-18. Распределитель 5 трубопроводом
0 соединен с гидробаком 3. Механизм 9 управления (фиг. 2) состоит из корпуса 24, в котором расположены золотники 11 -14, упирающиеся в тарелку 25, жестко укрепленную на отвесе 26, подвещенном посредством сферического шарнира 27 к корпусу 24. В штоке 28 гидроцилиндра 10 расположена пружина 29, на которую опирается фиксатор 30. Со стороны отвеса 26 к корпусу 24 крепится защитный кожух 31. Вертикальная ось корпуса 24 и кожуха 31 перпендикулярна
0 платформе грузоподъемной машины. Отвес 26, подвешенный с помощью щарового шарнира 27 к корпусу 24, с тарелкой 25 являются датчиком для определения наклона платформы.
Система управления выносными опорами работает следующим образом.
Золотник распределителя 5 переводят в крайнее правое положение, масло от насоса 1 по трубопроводу 4 через распределитель 5 поступает в канал 8 механизма
Q 9 управления и одновременно в штоковую полость гидроцилиндра 10. Так как усилие для опускания фиксатора 30 и штока 28, на который давит пружина 29, сравнительно мало по сравнению с усилием для опускания штоков гидроцилиндров 19-22 выносных опор, то фиксатор 30 раньше освободит отвес 26, чем начнут выдвигаться штоки гидроцилиндров 19-22.
Если угол наклона платформы грузоподъемной машины находится в пределах
0 допустимой нормы, то ось отвеса 26 строго перпендикулярна платформе машины, и масло через гидрозамки 15-18, через чеTbipe золотника 11 -14 поступает в поршневую полость гидроцилиндров 19-22. В поршневых полостях создается давление и штоки выносных опор выдвигаются с неодинаковой скоростью или же площадка под кран неровная, платформа крана отклоняется отклоняется отвес 26, который передвигает соответствующий золотник. Перекрывается
0 подача масла в соответствующий гидроцилиндр, шток которого наклоняет платформу крана. Так как другие золотники открыты, то платформа крана выравнивается, отвес занимает вертикальное положение и открывает закрытый золотник - кран
5 продолжает подъем на всех четырех штоках выносных опор. При достижении необходимой высоты подъема распределитель 5 переводится в нейтральное положение. Опусканию крана препятствуют гидрозамк 15-18. Если в момент перевода распределителя 5 в крайнее правое положение платформа крана наклонена, то отвес 26 после того, как шток 28 и пружина 29 гидроцилиндра 10 опустят фиксатор 30, отклонится от вертикального положения и тарелкой 25 передвинет один из золотников. Этот золотник препятствует подаче масла в поршневую полость соответствующего гидроцилиндра, который расположен с более поднятой стороны крана. После выравнивания платформы перекрытый золотник откроет с помощью отвеса 26 тарелки 25 доступ масла во все гидроцилиндры. Для перевода выносных опор в транспортное положение распределитель 5 переводят в крайнее левое положение. Масло от гидронасоса 1 по трубопроводу 4 через
24 распределитель 5 поступает по трубопроводу 23 в щтоковые полости гидроцилиндров 19-22, в гидрозамки 15-18 и в порщневую полость гидроцилиндра 10, шток 28 которого с пружиной 29 и фиксатором 30 поднимаются и фиксируют отвес 26 строго вертикально. Все золотники 11 -14 открыты. Гидрозамки 15-18 при повышении давления масла в штоковых полостях гидроцилиндров открывают слив масла из порщневых полостей через золотники И -14 и распределитель 5 в бак 3. Предохранительный клапан 6 при повышении давления в трубопроводе 4 в момент подхода штоков в крайнее положение сбрасывает масло в гидробак 3. Использование изобретения позволяет сократить время на установку крана на строительной площадке и перевод его в транспортное положение.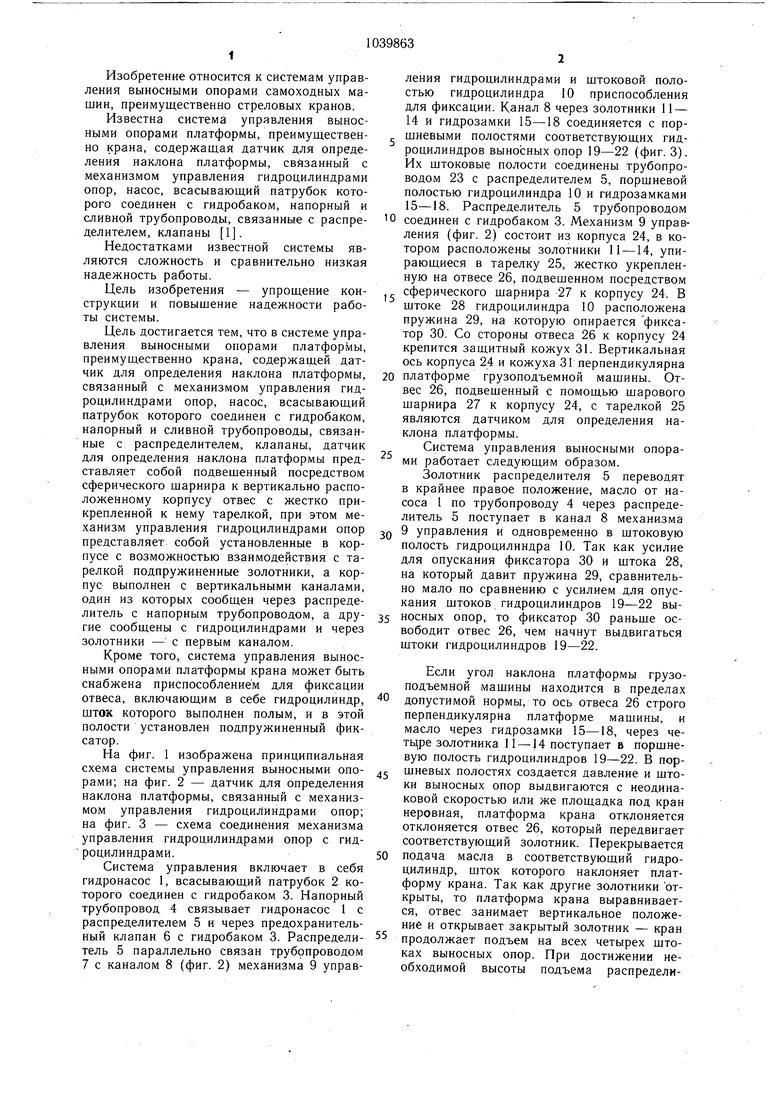
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления выносными опорами грузовой платформы | 1986 |
|
SU1423493A1 |
| Гидравлический привод стрелового самоходного крана | 1973 |
|
SU449881A1 |
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |
| Гидравлическая система автомобильного подъемника | 1979 |
|
SU854872A1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Устройство управления положением рамы транспортного средства | 1990 |
|
SU1808744A1 |
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1985 |
|
SU1379136A2 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1993 |
|
RU2029726C1 |
1. СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМИ ОПОРАМИ ПЛАТФОРМЫ, преимущественно крана, содержашая датчик для определения наклона платформы, связанный с механизмом управления гидроцилиндрами опор, насос, всасываюший патрубок которого соединен с гидробаком, напорный и сливной трубопроводы, свя: занные с распределителем, клапаны, отличаIT - т-../. f -Л.;; ..v-...а- f: 1 г- - I ,4;;-:- v..,...i .-iS;S: I .а ющаяся тем, что, с целью упрощения конструкции и повышения надежности работы, системы, датчик для определения наклона платформы представляет собой подвешенный посредством сферического- шарнира к вертикально расположенному корпусу отвес с жестко прикрепленной к нему тарелкой, при этом механизм управления гидроцилиндрами опор представляет собой установленные в корпусе с возможностью взаимодействия с тарелкой подпружиненные золотники, а корпус выполнен с вертикальными каналами, один из которых сообщен через распределитель с напорным трубопроводом, а другие сообщены с гидроцилиндрами и через золотники - с первым каналом. 2. Система по п. 1, отличающаяся тем, ю что она снабжена приспособлением для фиксации отвеса, включающим в себе гидро(Л цилиндр, шток которого выполнен полым, ti с в этой полости установлен подпружиненный фиксатор. оо со оо О5 оо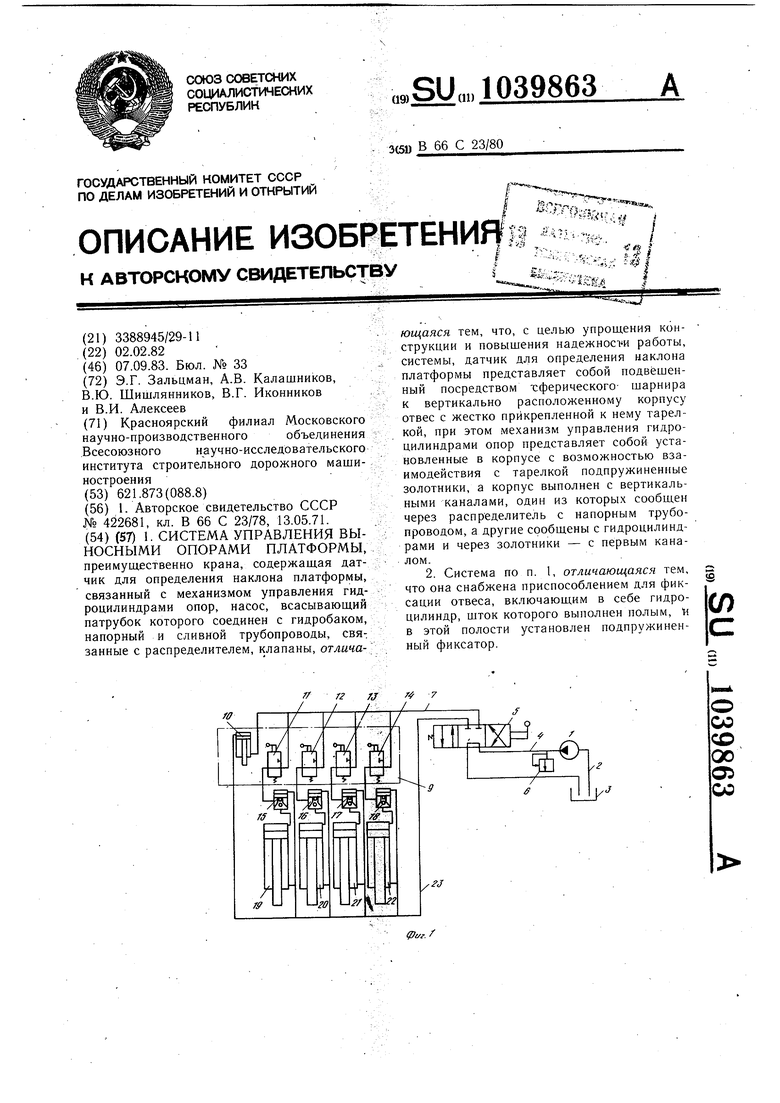
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМИ ОПОРАМИФу^'.Д 'i.-i.''--'—-• | 1971 |
|
SU422681A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
