Известные устройства для автоматического регулирования электропривода стана многократного волочения с вoздeйcтвиe на возбуждение приводных двигателей барабанов путем изменения положения регулирующих органов в цепях возбуждения с помощью серводвигателей, якоря которых питаются выходными напряжениями датчиков состояния проволоки между барабанами, не пригодны для осуществления беспетлезого (прямоточного) волочения, и не могут использовать в качестве датчиков состояния проволоки обычные датчики противонатяжения.
Предлагаемое устройство отличается тем, что одноименные зажимы датчиков противонатяжения, включенных в схему питания серводвигателей, объединены, a между противоположными зажимами каждой пары датчиков включен якорь серводвигателя, управляющего приводным двигателем барабана, находящегося на участке между этими датчиками. При этом напряжение, подводимое к якорю серводвигателя любого из барабанов, равно алгебраической сумме напряжений датчиков противонатяжения, установленных непосредственно ую обе стороны этого барабана.
Указанное отличие позволяет осуществить безпетлевое (прямоточное) волочение при параллельном питании приводных двигателей барабанов и использозать в качестве датчиков состояния проволоки датчики противонатяжения.
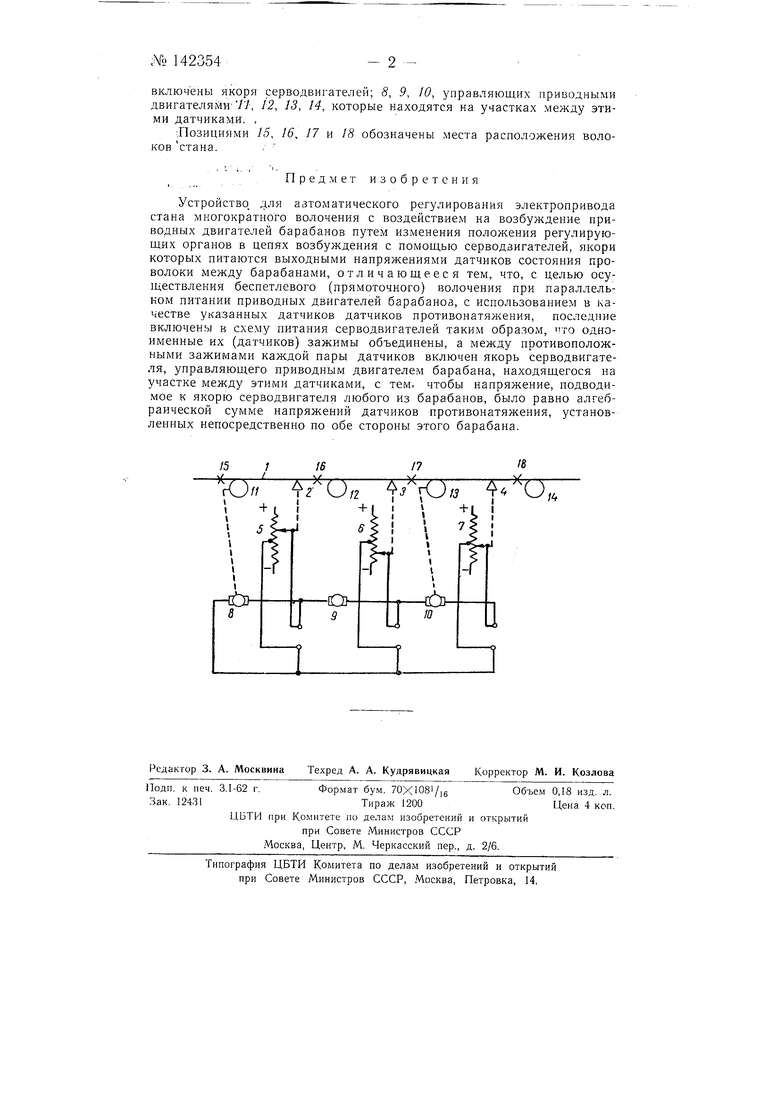
На чертеже приведена принципиальная схема предлагаемого устройства прямоточного многократного волочения.
В зависимости от величины натяжения проволоки / на участках между барабанами датчики противонатяжения 2, 5, 4 будут перемещать движки потенциометров 5, 6, 7 на пропорциональные натяжениям величины. Одноименные зажимы потенциометроз объединены, a между противоположными зажимами каждой пары потенциометров
включены якоря серводвигателей; 8, 9, 10, управляющих приводными двигателяйИ77, 12, 13, 14, которые находятся на участках между этими датчиками. ,
Позициями 15, 16, 17 и 18 обозначены места расположения волоков стана.
Предмет изобретения
Устройство, для азтоматического регулирования электропривода стана многократного волочения с воздействием на возбуждение приводных двигателей барабанов путем изменения положения регулирующих органов в цепях возбуждения с помощью серводвигателей, якори которых питаются выходными напряжениями датчиков состояния проволоки между барабанами, отличающееся тем, что, с целью осуществления беспетлевого (прямоточного) волочения при параллельком питании приводных двигателей барабаноз, с использованием в качестве указанных датчиков датчиков противонатяжения, последние включен. в схему питания серводвигателей таким образом, то одноименные их (датчиков) зажимы объединены, а между противоположными зажимами каждой пары датчиков включен якорь серводвигателя, управляющ,его приводным двигателем барабана, находящегося на участке между этими датчиками, с тем, чтобы напряжение, подводимое к якорю серводвигателя любого из барабанов, было равно алгебраической сумме напряжений датчиков противонатяжения, установленных непосредственно по обе стороны этого барабана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования электропривода петлевого стана многократного волочения | 1960 |
|
SU141917A1 |
| Устройство для автоматического регулирования электропривода стана многократного волочения | 1960 |
|
SU142355A1 |
| Система управления электроприводом прямоточного стана многократного волочения | 1978 |
|
SU749480A1 |
| Устройство для регулирования электропривода прямоточного стана многократного волочения | 1977 |
|
SU662184A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Способ управления многократным прямоточным волочильным станом | 1986 |
|
SU1632535A1 |
| Способ настройки прямоточного стана и устройство для его осуществления | 1975 |
|
SU620293A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОКРАТНЫМ ПРЯМОТОЧНЫМ ВОЛОЧИЛЬНЫМ СТАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2111807C1 |
| Многодвигательный электропривод | 1988 |
|
SU1649632A1 |
| Многодвигательный электропривод агрегата непрерывной обработки материала | 1980 |
|
SU1064850A1 |
