JW
.
i Изобретение относится к автомати- jiecKOMy управлению и защите потен- шально опасных объектов , работающих is условиях неконтролируемых возмуще- йий, и может быть использовано в хи- «шческой, пищевой и других отраслях )1ромытпенности.
Целью изобретения является повышение надежности системы при наличии
If изменениях регулируемой величины |сак случайной, так и периодической доставляющей путем изменения порогового заданного значения в зависимости от йероятностных свойств случай- юй и периодической составляющих.
I Блок-схема системы представлена fja чертеже.
Система содержит измеритель 1 рассогласования, формирователь 2 сигнала правления, объект 3 управления, дат- iKK 4 регулируемой величины, которые :оставляют основной канал 5 управле™
20
Инерционные свойства объекта уп равления и наличие неконтролируемых внешних возмущений f(t) позволяет принять следующую модель периодической составлякяцей:
S(t) Ag(t)-sin(c05(t)t -f 4), (2) где A(t) - амплитуда; COs(t) - частота}
Ч - случайная начальная фаза, равномерно распределенная на интершя, оптимизатор 6 заданного значения 5 вале cfE -7,11 гармонического коле- 1)егулируемой величины, блок 7 ограни- бания. ения скорости изменения, измеритель
рассогласования и ключ 9, которые оставляют блок 10 защиты, фильтры
3D
По отношению к случайной составляющей n(t) задача основного контура управления состоит в ее максимальном подавлении за минимально возможное время. В частности, время спада Tj, корреляционной функции KCt,,t) до пренебрежимо малых значений можно рассматривать как среднее время компенсации случайных возмущений. По отношению к периодической составляющей S(t) основной канал управления может выполнять аналогичную задачу, если S(t) вызывается периодической составляющей во внешних возмущениях или нелинейностью самого основного контура управления. С другой стороны, задача основного канала состоит в поддержании периодической составляю11-13 низкой частоты, измеритель 14 рассогласования, дифференциатор. 15, вадраторы 16, 17, которые составляют лок 18 оценки статистических пара- етров регулируемой величины, блок 19 Оценки статистических параметров 35 (случайной и периодических составляю- ||цих), содержащий квадраторы 20-25, фильтры 26, 27 низкой частоты, усили- 28-32, измерители 33-36 рассо- ласования, блоки 37-40 извлечения 40 ;|свадратного корня, блок 41 деления, блок 42 коррекции порогового заданно- Го значения, содержащий усилители 43, 144, блоки 45, 46 извлечения квадратного корня, блоки 47-49 деления, бло-дЗ (слежении за ней), когда она вы- Ки умножения 50, 51, блоки 52, 53 запоминания постоянной составлякйцей, сумматор 54, вычислительньй блок 55, состоящий КЗ блока 56 деления, бло ков 57, 58 извлечения квадратного JQ Корня, делителя 59, блока 60 вьгчисле- |ния логарифма, блока 61 умножения, измерителя 62 рассогласования и блока 63 запоминания аварийного значения регулируемой величины, сумматор 64,
При определенных условиях функционирования системы плотность вероятности случайных изменений регулируемой в.еличиньпс X во времени t имеет
звана, например, поисковым алгорит- мом работы оптимизатора и несет в себе полезную для системы информацию.
Реальные процессы X(t) не являются стационарньП Ш вследствие нестационарности во времени параметров объекта управления и внешних возмущений. Скорость изменения этих параметров может быть оценена временами спада Тср ., соответствующих корреляционных функций до пренебрежимо мапчх значений. Но так как у большого числа объектов управления скорость изменения их параметров и параметров
двумодельный характер, являясь композицией гармонического и нормального законов распределения. Полная модель случайного процесса X(t) с приемлемой для практики точностью может быть представлена в виде двух аддитивных составляющих
X(t) n(t) + S(t), (1) где n(t) - нормальный дифференцируемый процесс со средним значением m;(t) и корреляционной функцией K(t, ,t2) (t)R,(t,,t,i);
EKt) - периодическая составляющая.
Инерционные свойства объекта уп равления и наличие неконтролируемых внешних возмущений f(t) позволяет принять следующую модель периодической составлякяцей:
S(t) Ag(t)-sin(c05(t)t -f 4), (2) где A(t) - амплитуда; COs(t) - частота}
Ч - случайная начальная фаза, равномерно распределенная на интервале cfE -7,11 гармонического коле- бания.
вале cfE -7,11 гармонического коле- бания.
По отношению к случайной составляющей n(t) задача основного контура управления состоит в ее максимальном подавлении за минимально возможное время. В частности, время спада Tj, корреляционной функции KCt,,t) до пренебрежимо малых значений можно рассматривать как среднее время компенсации случайных возмущений. По отношению к периодической составляющей S(t) основной канал управления может выполнять аналогичную задачу, если S(t) вызывается периодической составляющей во внешних возмущениях или нелинейностью самого основного контура управления. С другой стороны, задача основного канала состоит в поддержании периодической составляю (слежении за ней), когда она вы-
(слежении за ней), когда она вы-
звана, например, поисковым алгорит- мом работы оптимизатора и несет в себе полезную для системы информацию.
Реальные процессы X(t) не являются стационарньП Ш вследствие нестационарности во времени параметров объекта управления и внешних возмущений. Скорость изменения этих параметров может быть оценена временами спада Тср ., соответствующих корреляционных функций до пренебрежимо мапчх значений. Но так как у большого числа объектов управления скорость изменения их параметров и параметров
TCO и Те 2T/G)s, т.е. 21Г/СО,
. U23977 внешних возмущений относительно невысока и времена спада Тс и значительно больше Т и , , ZWcOg, ,. ZT/COg, то это позволяет принять гипотезу о квазистационарности параметров и на определенном интервале времени считать процессы X(t) стационарными.
Рассматривая случайные процессы X(t) на скользящем интервале времени t , можно оперативно (с запаздыванием на 2 ) определить оценки их статистических характеристик -т
5 к
X
гд
10
А
п. 0| ,
g, 63 S ДР- Величина
| (п
()(Tj. + 2 ir/Og) является пренебрежимо малой величиной по сравнению
« Т
Примеры определения оценок параметров Гоу, G J (5 2 на скользящем интервале времени Г приведены в (2). Вычисление оценок 0 ,0 ., Ag,ti на скользящем интервале времени произведено по формулам
15 но ле ха но но
20 ег во щи те 25 Оп
5
ральных моментов регулируемой величины X(t) и ее производной X(t), на интервале 1: ; AgCOg- амплитуда производной
гармонического колебания; 40 значения С ,G - среднеквадратические значения регулируемой величины X(t) и ее производной X(t), оцененных на скользящем интервале времени 1.
Текуща тистическ быть испо 35 ки надежн потенциал этого по навливаю равления
нечном и ), безавари
допустим
45 Опред
составля X(t) про
Эксплуатация потенциально опасного объекта имеет смысл тогда, когда аварии, т.е. выход регулируемой величи- ны X(t) за аварийное значение Х являютсяслучае, эти
исключительно редкими. В этом с позиции теории вероятности, события независимы и их появле
ние может быть описано законом Пуассона. В частности, вероятность отсутствия события X(t) Хд на интервале временив, когда модель X(t) опредег- ляется по (1), равна (о)
3977
ехп -i- - M®V5-°-I-Si -I Aa 2s N Р 2 irw5 n
,
5 к1ф-((р) .
1
X d(,),
гдеФ(г) -.Ц J
2
е
0
Ф (z)
1
lf-nV- P(fsinC)x
(7)
dX - интеграл вероятности,
1
-;;: ехр(- - z )
производная от
P(z),Cj;
+ Cf .
Эта вероятность определяет вероят- 5 ность базаварийной работы на интервале Т и является той мерой, которая характеризует надежность (безопасность) эксплуатации потенциально опасного объекта.
0 Во время работы объекта изменения его параметров и параметров внешних возмущешо приводят к соответствующим изменениям статистических характеристик случайного процесса X(t). 25 Оперативная оценка т-, СГ
COg на
П -т, 5
скользящем интервале о позволяет определить по зависимости (7) ве- , роятность безаварийной работы (€) практически в реальном масштабе вре- 30 мени, в темпе с технологическим процессом в объекте,
Текущая информация об оценках статистических характеристик X(t) может быть использована не только для оцен- 35 ки надежности, но и для управления потенциально опасным объектом. Для этого по текущим оценкам X(t) устанавливаются для основного канала управления такие пороговые заданные
значения
Х (а следовательно, в конечном итоге, такие средние значения ), при которых вероятность безаварийной работы будет не менее
допустимой, т.е.
Pep С)
(С).
Определение X,, отдельно для каждой
значения
составляющей случайного процесса X(t) производится по формуле
Х„ Хо -СГ, X
((r.(J;, /ZTTG lnCl/Ppgp (C)) С,
(8)
учитывая выражение для Х„ по (2), где С - вклад периодической состав- ляющей.
Рассматривая С как функцию С f(Gn,C,Ag,Qg, (), ;:,-с необходимой для практических применений точностью, аппроксимацию этой функци:ональной зависимости получают в виде следующей регрессии:
h
, WsGn
-оТ
V 2 X
С Ь„ . ., . . . „
ln( ()), -(9)
е слагаемые которой безразмерны. астности, для диапазонов измене
1- 0.5-3,5,
Gn
с-
о, 1-4,о.
.гт
..Бp ()) 0,0001-0,05, 15
которые охватывают значительную часть встречающихся на практике (в химической и пищевой промьшшенкости) объек™ тов зтгравления и условий их функцио- 20 нирования,, получена следз ющая конкре- тиза1щя уравнения регрессии (9):
,А& СУп 1п(1/Р
Таким образом, определив оценки араметров случайного процесса X(t)
С -0,5691 + 1,009
- . §
+ ОИ326 X (t)). (10)
JMOCTHM (8)-(10) можно установить та-- JKoe пороговое заданное значение JKOTppoe обеспечит необходимую надеж- ность работы потенциально опасного |объекта при наличии в изменениях ре™ |гулируемой величины, кроме случайной |также и гармонической составляющей„ , Система работает следующим образом.
: В ОСНОВНОМ канапе 5 управления формирователь 2 сигнала управления вьфабатьтает управляющий сигнал на объект 3 таким образом чтобы рассогласование на выходе первого измерителя 1 рассогласования Х - X :6ыло минимальным, где Хд - заданное значение регулируемой величины, т.е основной канал 5 управления изменение сигнала задания регулятору Х и изменение значений внешних возмущений 1Го зависимости
Х(р) W.Cp), + Wj(p)jii(p), (11) где W,(p) и ) - передаточные функции основного канала управления 5 по каналу задания и возмущения.
Оптимизатор 6 заданного значения регулируемой величины по значениям регули1 уемой величины X, поступающей с датчика А, и по значениям внешних параметров г, ,,., q определяет оп
0
5
0
5
0
5
0
тимгшьное заданное значение регулируемой величины Хд, соответствующее эк- стремт, му функции цели Е f (x,r,..., q), т.е.
Xj, arg ext E(x,r,...,q). (12) Рассчитанная величина сигнала оптимального заданного значения Х,, поступает в блок 10 защиты, а именно на вход блока 7 ограничения скорости изменения заданного значения регулируемой величины, на другие входы которого поступают сигналы регулируемой величины с выхода датчика 4, заданного значения Х., регулируемой величины к с выхода ключа 9 и порогового значения Х. регулируемой величины с выхода сумматора 64„ Ограничение скорости изменения оптимального заданного зна- .чения Хд на определенном расчетном уровне X необходимо для того, чтобы, учитывая инерционность обьекта 3 управления, ограничить скорость приближения регулируемой величины X к пороговому значению Х, и тем самым не допустить таких выходов X за Х, кото рые превысили бы аварийное значение Хр, Блок 7 может осуществлять эту ФУНКЦИЮ, например., по зависимостями Хо при V, - Vo О,
Хр
X при Vj - V и О,
5
V3 К(Х,, - X), V Хо - Xi Х„ Х + Va
(13)
-г УЗ ,
где К - коэффициент пропорциональности.
Функцию блока 7 вьшолняет . инерционное (апериодическое) звено с на- f. страиваемой постоянной времени Т. При этом Тф, также как и коэффициент пропорциональности К в (13)s зависит от инерционных свойств объекта управления.
Так как оптимизатор заданного значения регулируемой величины 6 определяет оптимальное заданное значение XQ по (13) без учета ограничения X(t):.Xjj, то заданное значение Х, регулируемой величины необходимо ограничивать на пороговом значении Х,
причем из-за наличия неконтролируемых внешних возму1цений и инерционности основного канала управления 5 Х gg должно быть меньше XQ., По знаку разности Х - Хр, которая вычисляется в измерителе 8 рассогласования и поступает на управляющий вход ключа 9, последний переключает свой выход на
один из входов, куда поступают сигналы Х с выхода измерителя рассогласования и X с выхода блока 7, т.е. реализуется зависимость
X
х,.
р при Х,- Хр 0,
(U)
Х„ при Х - . Изменение интенсивности, спектрального состава неконтролируемых внешних возмущений цх и параметров
объекта 3 управления во времени вызыJвают изменения статистических характеристик случайного -процесса X(t), что требует и соответствующей настройки порогового заданного значения Х по (8,, 9),
Реализацию этих зависимостей выполняют блок 18 оценки статистических параметров регулируемой величины, блок 19 оценки статистических параметров случайной и периодической сос тавляющих, блок 57, блок 42 коррекции порогового заданного значения и измеритель 62 рассогласования.
Блок 18 на скользящем интервале времени f оценивает статистические параметры регулируемой величины X(t) . Знaчeния X(t) с выхода датчика 4 по-° ступают на вход фильтра 11 низкой частоты, который усредняет их на интервале t ,
Фильтр низкой частоты выполнен в виде инерционного звена первого порядка - интегратора, охваченного единичной отрицательной обратной связью, которьй реализует экспоненциально взвешенное усреднение по зависимости
1
рат KBaj;paTopoM 16 и усредняется по (15) на фильтре 12 низкой частоты, сигнал с выхода которого является оценкой дисперсии регулируемой величины j на интервале С . Этот же сигнал X(t) поступает на вход дифференциатора 15, который определяет его производную Xц(t), а квадратор 17 и
1Q фильтр 13 низкой частоты определяют оценку дисперсии производной регулируемой .величины G на интервале t .
Сигналы X(t) ,, G , X(t) поступают соответственно на первый-чет15 вертьм входы блока 19 оценки статистических параметров случайной и периодической составляющих. Блок 19 на скользящем интервале Г по зависимостям (3)-(6) определяет оценки статис-
2Q тических параметров случайной n(t) и периодической S(t) составляющих регулируемой величины X(t). i
Сигнал Xц(t) с первого входа блока 19 возводится в четвертую степень 25 квадраторами 20 и 21 и усредняется по (15) на фнпьтре 26 низкой частоты, сигнал с выхода которого является оценкой четвертого центрального.момента U регулируемой величины на ин30
35
тервале . Функции, выполняемые квадратором 22, усилителями -28 и 29, измерителями 33, 34 рассогласования и блоком 37 извлечения квадратного корня, соответствуют их наименованиям, а очередность их подключения следует из (3). Коэффициенты усиления усилителей 28 и 29 равны соответственно 1/3 и 2. Таким образом, на выходе блока 37 устанавливается сигнал
лfА.. /- V- -/iJHw/IXC. i ir JiJLJtlV- 1 .. llOuJ 1
XCt,-;::) -- I exp(- --)(t-2r)dtf 40 равньш A|/2, a на выходе блока 34 ,+ X(t 0), t,(15)
где X(t, ) - усреднеиньй на скользящем интервале времени сигнал на выходе фильтра;
Ту - постоянная интегрирования ( 0,5t)i X(t) - сигнал на входе фильтра, X(t 0) - значение начальных условий
на интеграторе. Измеритель 14 рассогласования определяет центрированный относительно XCt,) случайньй процесс Xn(t), как разность сигналов X(t) с выхода датчика 4 и X(t, t) с выхода фильтра 11 низкой частоты..
Сигнал Xц(t) с выхода измерителя 14 рассогласования возводится в квадсигнал, равный оценке дисперсииG случайной составляющей n(t) на скользящем интервале t , который поступает на второй выход блока 19. Сигнал с 45 выхода блока 37 проходит через блок 38 извлечения квадратного корня и усилитель 30 (с коэффициентом усил ё- ния -л12 ), выходной сигнал которого является оценкой амплитуды Ад гармонической составляющей S(t) на интервале С и поступает на первый выход блока 19.
Аналогичные преобразования по зависимости (4) происходят на блоках 23-25, 27, 31, 32, 35, 36 и 39 с сиг налами G и X4(t), которые поступают на третий и четвертый входы блока 19 На выходе блока 39 извлечения квад- ратного корня устанавливается сигнал
50
55
° ,
рат KBaj;paTopoM 16 и усредняется по (15) на фильтре 12 низкой частоты, сигнал с выхода которого является оценкой дисперсии регулируемой величины j на интервале С . Этот же сигнал X(t) поступает на вход дифференциатора 15, который определяет его производную Xц(t), а квадратор 17 и
1Q фильтр 13 низкой частоты определяют оценку дисперсии производной регулируемой .величины G на интервале t .
Сигналы X(t) ,, G , X(t) поступают соответственно на первый-чет15 вертьм входы блока 19 оценки статистических параметров случайной и периодической составляющих. Блок 19 на скользящем интервале Г по зависимостям (3)-(6) определяет оценки статис-
2Q тических параметров случайной n(t) и периодической S(t) составляющих регулируемой величины X(t). i
Сигнал Xц(t) с первого входа блока 19 возводится в четвертую степень 25 квадраторами 20 и 21 и усредняется по (15) на фнпьтре 26 низкой частоты, сигнал с выхода которого является оценкой четвертого центрального.момента U регулируемой величины на ин30
35
тервале . Функции, выполняемые квадратором 22, усилителями -28 и 29, измерителями 33, 34 рассогласования и блоком 37 извлечения квадратного корня, соответствуют их наименованиям, а очередность их подключения следует из (3). Коэффициенты усиления усилителей 28 и 29 равны соответственно 1/3 и 2. Таким образом, на выходе блока 37 устанавливается сигнал.
i. /- V- -/iJHw/IXC. i ir JiJLJtlV- 1 .. llOuJ 1
40 равньш A|/2, a на выходе блока 34 равньш A|/2, a на выходе блока 34 сигнал, равный оценке дисперсииG случайной составляющей n(t) на скользящем интервале t , который поступает на второй выход блока 19. Сигнал с выхода блока 37 проходит через блок 38 извлечения квадратного корня и усилитель 30 (с коэффициентом усил ё- ния -л12 ), выходной сигнал которого является оценкой амплитуды Ад гармонической составляющей S(t) на интервале С и поступает на первый выход блока 19.
Аналогичные преобразования по зависимости (4) происходят на блоках 23-25, 27, 31, 32, 35, 36 и 39 с сигналами G и X4(t), которые поступают на третий и четвертый входы блока 19. На выходе блока 39 извлечения квад- . ратного корня устанавливается сигнал.
|)авный А|/2 А|а)|/2, а на выходе измерителя 35 рассогласования - сиг™ 1(1ал, равный оценке дисперсии произ- Йодной С5 слз 1айной составляющей i(t) на скользящем интервале времени f, который поступает на третий выход флока 191, После деления сигнала
f из блока 40 на сигнал А./УТиз
(лока 38 извле .чения квадратного корня л блоке 41 деления на четвертом вы- оде блока 19 установится сигнал, 1| авньй оценке частоты utg гармонйчес 1|сой составляющей S(t) на интервале , I С BToporq и третьего выходов бло 1|са 19 сигналы G . иО поступают на йервый и второй входы вычислитель-- иого блока 55,, который при заданных аварийном значении регулируемой величины Xgj времени усреднения с и до-- 1|густимой вероятности безаварийной
работы Равр () ;: ВЫЧИСЛЯвТ ВКЛЗД СЛУ
тайной составляющей n(t) в определение порогового данного значения Х, I Блок 63 запоминания аварийного качения регулируемой величины вводит ;шачение Хц„ Функцииs вьдголняемые 15ЛОКОМ 56 деленияJ блокалш 57j 38 из-- )шечения квадратного корня;, блоком 60 вычисления логарифмву блоком 61 умно- згения и измерителем 62 рассогласования, соответствуют своим каимеиова- ям
Сигналы Ags
О-.,.
aXf с первого-
Четвертого выходов блока 19 поступа ibr на одноименные входь блока, 42 кор- |)екции порогового заданного значетш 1|соторьш при згщанньп значениях време- ikH осреднехшя 1 и допустимой верэят- ijiocTH безаварийной работы Р. Со) по iSaBHcm-iocTH (9) вычисляет пйлад пери- йдической .составляющей S(t) в опредв - Ление порогового заданного значения .К„ по (8) о
Усилитель 43 вводит коэфс ициекТэ Соответствующей коэффициенту Ь ре Грессии (9),, усилитель 44 - коэффй™ :(щенту Ъ регрессии (9) е Блок запо- 1Иинания 52 постоянной составляющей бводит константуS равную bj 2Сх
а блок 53 запош на- кон:K-;in(1/P5ep )А.
йия постоянной составляющей
Ьтанту, равную Ь b (9), ФункциИэ |толняе№ 1е блоками 45, 46 извлечения Квадратного корня блоками 47-49,деления s блоком 51 умножения и сумма- tropoM 54, соответствуют своим наймео
5
0
0
5
0
е
нованиям, а очередность их подключения вытекает из (9). Блок 50 умножения перемножает сигналы С,, с выхода блока 45 и С с выхода сумматора 54 по (8).
Окончательное формирование порогового заданного значения Х выполняет сумматор 64, на котором происходит алгебраическое сложение выходных сигналов из блоков 55 и 42.
в начальнью момент времени при вклЕочении объекта 3 управления в ра боту пороговое заданное значение регулируемой величины Х устанавливается . на безопасном уровне, исключающем возникновение аварийной ситуации при наихудших реальных внешних возмуще- в:иях путем установки начальных уело- . вкй на интеграторах фильтров низкой частоты 12, 13., 26, 27, При накоплении информагдии о случайном процессе X(t) в течение скользящего интервала еремени Т значение Х, корректируется блоками 55 и 42 с учетом вероятностных свойств данного случайного.процесса,
Ф о р м у л а изобретения
t, Адаптивная система управления потенциально опасшзм объектом, содержащая основной кан.ал управления, оп- тим1-ззатор, блок защиты, первый, вто- -. рой и третий фильтры низкой частоты, кзгдаритель рассогласованияэ диффе- реньщаторэ первый и второй квадрато- .ры и вычислительный блок, причем выход основного канала - шравлення сое динен с первым входом измерителя рассогласования, с входом первого фильтра низких частот, с первым входом блока защиты и входом оптимизатора, подключенного выходом к второму входу блока защиты, выход которого подклю чен к входу основного канала управления, выход первого фильтра низких частот подютючен к второму входу первого измерителя рассогласования, выход которого соединен через первый квад,ратор с входом второго фильтра низких частот, а непосредственно - с входом дифференциатора, подключенного выходом через второй квадратор к входу третьего фильтра низких час- TOTj отличающаяся тем , что, с целью повышения надежности системы при в изменениях ре гул -фуемой величины как случайной
так и периодической гЬставляющей, в нее введены блок оценки статистических параметров, блок коррекции поро- гового заданного значения и сумматор, выход которого соединен с третьим входом блока защиты, первый вход сумматора подключен к выходу вычислительного блока первый вход которого соединен с вторым выходом блока оцен- ки статистических параметров и с вторым входом блока коррекции порогового заданного значения, подключенного третьим входом к второму входу вычислительного блока и к третьему выходу блока оценки статистических параметров, первый и четвертьш выходы которого подключены соответственно к первому и четвертому входам блока коррекции порогового заданного значения, выход которого соединен с вторьм входом сумматора о
2, Система поп.1,отлича ю- щ а я с я тем, что блок оценки статистических параметров содержит шесть квадраторов, два фильтра низкой частоты, четыре измерителя рассогласования, пять усилителей, шесть блоков извлечения квадратного корня и блок деления, причем первый вход блока оценки статистических параметров через последовательно подключённые первый и второй квадраторы, первый; фильтр низкой частоты и первый усилитель соединен с первым входом перво- го измерителя рассогласования, вто- рой вход которого через третий квадратор соединен с вторым входом блока оценки статистических параметров, а выход первого измерителя рассогласо- вания через последовательно соединенные второй усилитель, первый и второй блоки извлечения квадратного корня и третий усилитель соединен с первым выходом блока оценки статистических параметров, второй вход которого подключен к первому входу второго измерителя рассогласования, второй вход которого подключен к выходу первого блока .извлечения квадратного корня, а выход второго измерителя рассогла- сования подключен к второму выходу блока оценки статистических параметров, третий вход которого соединен с первь1М входом третьего измерителя рассогласования, выход которого соединен с третьим выходом блока оценки статистических параметров, четвертьй вход которого через последовательно
соединенные четвертьй и пятый к-дадр ч- торы, второй фильтр низкой частоты и четвертый усилитель соединен с первым входом четвертого измерителя рассогласования, второй вход которого через шестой квадратор соединен с третьим входом блока оценки статистических параметров, а выход четвертого измерителя рассогласования через пятый усилитель подключен к входу третьего блока извлечения квадратного корня, выход которого подключен к второму входу третьего измерителя рассогласования и через четвертый блок извлечения квадратного корня - к входу делимого блока деления, вход делителя которого соединен с выходом второго блока извлечения квадратного корня, выход блока деления соединен с четвертым выходом блока оценки статистических пар аметров,
3. Система поп.1, отличающаяся тем, что блок коррекции порогового заданного значения содержит два усилителя, два блока извлечения квадратного корня, три блока деления, два блока умножения, два блока запоминания постоянной составляющей и сумматор, причем первый вход блока коррекции порогового заданного значения через первый усилитель соединен с входом делимого первого блока деления, выход которого соединен с первым входом сумматора, второй вход блока коррекции порогового заданного значения через первый блок извлечения квадратного корня подключен к входу делимого второго блока деления, к входу делителя первого блока деления и первому входу первого блока умножения, третий вход блока коррекции порЬгового заданного значения через второй блок извлечения квадратного корня соединен с входом делителя второго блока деления, выход которого соединен с первым входом второго блока умножения, второй вход которого подключен к четвертому входу блока, коррекции порогового заданного значения, а выход второго блока умножения через второй усилитель подключен к второму входу сумматора, четвертый вход блока коррекции порогового заданного значения соединен с входом делителя третьего блока деления, вход делимого которого соединен с выходом первого блока запоминания пос13142397714
т|оянной составляющей, выход третьегощей, выход сумматора подключен к вто(ока деления соединен с третьим вхо-рому входу первого блока умножения,
fijoM сумматора, четвертый вход кото-выход которого соединен с выходом
подключен к выходу второго бло ,блока коррекции порогового заданного
Kja запоминания постоянной составляю-значения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Коррелятор отраженного сигнала | 1978 |
|
SU798888A1 |
| Устройство для определения закона распределения случайной величины | 1986 |
|
SU1425713A1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005994C1 |
| Рентгенотелевизионный дефектоскоп | 1989 |
|
SU1599730A1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА РИТМА СЕРДЦА • | 1979 |
|
SU824988A1 |
| Устройство для контроля случайных процессов с помехами | 1983 |
|
SU1141423A1 |
| Адаптивное устройство для определения среднего значения случайного процесса | 1982 |
|
SU1043664A1 |
| Система управления пресс-гранулятором | 1985 |
|
SU1301726A1 |
Изобретение относится к автоматическому управлению и защите потенциально опасных объектов, работающих в условиях неконтролируемых возмущений, и может быть использовано ъ хи- мичейкой, пищевой и других отраслях промышленности. Целью изобретения является повышение надежности системы при наличии в изменениях регулируе мой величины как случайной, так и периодической составлякяцей путем изменения порогового заданного значения в зависимости от вероятност1&1х свойств случайной и период1-гческой составляющих. Система содержит основной канал 5 управления, -оптимизатор 6, блок 10 запщты, блок 18 оценки статистических параметров регулируемой величины, блок 19 оценки статистических параметров, блок 42 коррекции порогового заданного значения, вычислительньй блок 55, сумматор 64. Система позволяет учесть наличие в изменениях ре g гулируемой величины, кроме случайной, также и периодической составляющей. Это повышает надежность эксплуатации потенциально опасного объекта, так как увеличивается точность определения допустимой области изменений регулируемой величины. 2 з.п. ф-лы, 1 ил.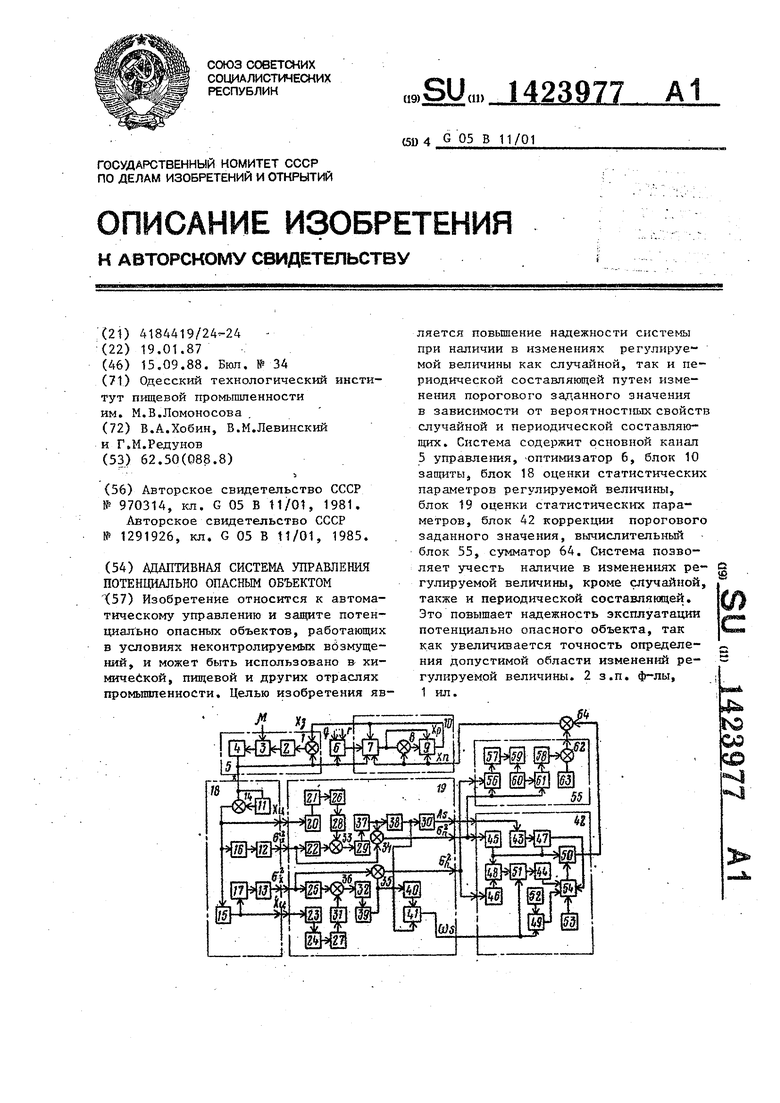

| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
