(Л
ел
00 4
О
3isn
тур 5 управления, блок 10 защиты, блок 1Й оценки статистических параметров регулируемой величины, блок 19 оценки статистических параметров случайной и периодической составляющих,, вычислительный блок 20, блок 2б коррекции порогового заданного значения по постоянной составляющей, блок 3 коррекции динамических свойств
16 V
системы, сумматоры 22, 35, оптимизз тор 6. В системе компенсируются запаздывание и инерционность в основном контуре управления, корректируется заданное значение регулируемой координаты и точно оценивается вероятность безаварийной работы, что повышает надежность и эффективность работы системы. 2 з.п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ | 2002 |
|
RU2251721C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| Регулятор | 1989 |
|
SU1789969A1 |
Изобретение относится к автоматическому управлению и защите потенциально опасных объектов, работающих в условиях неконтролируемых возмущений, и может быть использовано в химической, пищевой и других отраслях промышленности. Целью изобретения является повышение надежности и точности системы в условиях действия на объект неконтролируемых возмущений. Система содержит основной контур 5 управления, блок 10 защиты, блок 18 оценки статистических параметров регулируемой величины, блок 19 оценки статистических параметров случайной и периодической составляющих, вычислительный блок 20, блок 26 коррекции порогового заданного значения по постоянной составляющей, блок 34 коррекции динамических свойств системы, сумматоры 22, 35, оптимизатор 6. В системе компенсируются запаздывание и инерционность в основном контуре управления, корректируется заданное значение регулируемой координаты и точно оценивается вероятность безаварийной работы, что повышает надежность и эффективность работы системы. 2 з.п.ф-лы, 1 ил.
Изобретение относится к автоматическому управлению и защите потенци- ально опасных объектов, работающих в условиях неконтролируемых возмущений, и может быть использовано в химической, пищевой и других отраслях промышленности .
Целью изобретения является повышение надежности и точности системы в условиях действия на объект неконтролируемых возмущений.
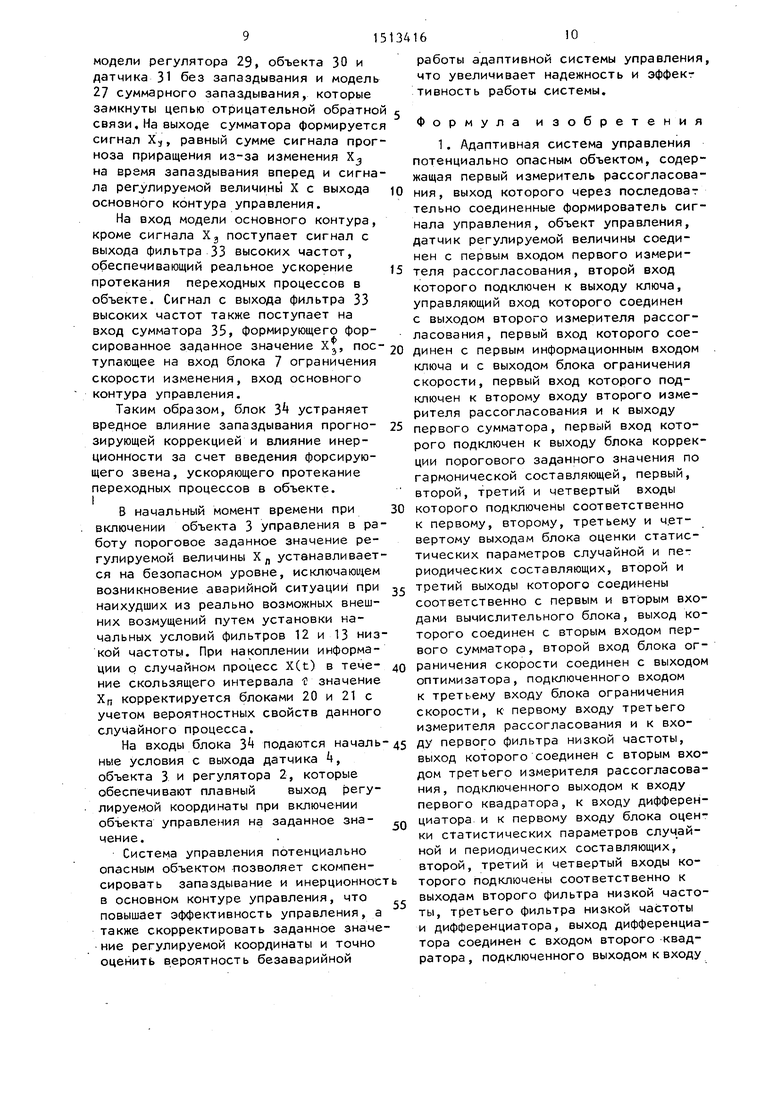
На чертеже представлена блок-схема системы.
Система включает первый измеритель 1 рассогласования, формирователь 2 сигнала управления, объект 3 управления, д 1тчик k регулируемой вели- чины., которые составляют основной контур 5 управления, оптимизатор 6 (заданного значения регулируемой величины) , блок 7 ограничения скорости, второй 8 измеритель рассогласования и ключ Э., которые составляют блок 10 защиты, первый 11, второй 12, третий 13 фильтры низкой частоты,,третий измеритель рассогласования, дифференциатор 15, первый 1б и второй 17 квадраторы, которые составляют блок 18 оценки статистических параметров регулируемой величины, блок 19 оценки статистических параметров случайной и периодических составляю- щих, вычислительный блок 20, блок 21 коррекции порогового заданного значения по гармонической составляющей, первый сумматор 22, сумматор 23, фильтр 24 низких частот и измеритель 25 рассогласования, которые составляют бло 26 коррекции порогового заданного значения по постоянной составляющей, модель 27 общего запаздывания, измеритель 28 рассогласования модель 29 регулятора (без запаздывания), модель 30 объекта (без запаздывания), модель 31 датчика (без запаз- дывания), измеритель 32 рассогласования, фильтр 33 высоких частот, составляющие блок 3 коррекции динамических свойств системы, второй сумматор 35.
Система работает следующим образом.
В основном контуре 5 управления формирователь 2 сигнала управления вырабатывает управляющий сигнал на объект 3 так, что рассогласование на выходе первого измерителя 1 рассогласования Е Х - X минимальное где X - заданное значение регулируемой величины, т.е. основной контур 5 управления отрабатывает изменение сигнала задания регулятору Xj и изменение значений внешних возмущений |u по зависимости Х(р) W ЛР)-ХЗ + W j(p)- р(р), (1) где,) ) - передаточные
функции основного контура 5 управления по каналу задания и возмущения.
Оптимизатор 6 заданного значения регулируемой величины по значениям регулируемой величины X с компенсацией запаздывания и инерционности, поступающей с измерителя 32 рассогласования, и по знамениям внешних параметров r,...,q определяет оптимальное заданное значение регулируемой величины Хо, соответствующее экстремуму функции цели Е f(X, г,..., q), т.е.
Х argextr Е(Х, г,..., q). (2) Рассчитанная величина сигнала оптимального заданного значения Х поступает в блок 10 защиты, а именно на вход блока 7 ограничения скорости изменения заданного значения регулируемой величины, на другие входы которого поступают сигналы регулируемо величины Х с компенсацией запаздывания и инерционности с выхода изме is
рителя 32 рассогласования, форсированного заданного значения X регулируемой величины X с выхода сумматора 35 и порогового заданного значения XH регулируемой величины с выхода сумматора 22.
Ограничение скорости изменения оптимального заданного значения Хр на определенном расчетном уровне Хр необходимо для того, чтобы, учитывая инерционность объекта 3 управления, ограничить скорость приближения регулируемой величины ОХ к пороговому значению Х и тем самым не допустить таких выходов X за Х„, которые превысили бы аварийное значение Хд. Блок 7 может осуществлять эту функцию, например, по зависимостям
{
Х при УЗ - Vo 7 0; . 0;
X
Хр
при Vj - Vo
V.
К(Х„ - X);
Vo Xо - X, УЗ + Х,
где К - коэффициент пропорциональности.
Так как оптимизатор 6 заданного значения регулируемой величины определяет оптимальное заданное значение XQ по (2) без учета ограничения X(t) Xj,|, то заданное значение Х регулируемой величины необходимо ограничивать на пороговом значении Х, причем из-за наличия неконтролируемых внеш- них возмущений и инерционности основного контура 5 управления X должно быть меньше Х. По знаку разности X „ - Хр, которая вычисляется на измерителе 8 рассогласования и посту- пает на управляющий вход ключа 9, последний переключает свой выход на один из входов, куда поступают скорректированный сигнал X р Xfl + д m ;( с выхода блока 26 и сигнал с выхода блока 7, т.е. реализует зависимость , Г Хр при Х п - Хр 0; при - Хр 0. (
Изменения интенсивности, спектрального состава неконтролируемых внешних возмущений f и параметров объекта 3 управления во времени вызывают изменения статистических характеристик случайного процесса X(t), что требует и соответствующей наX,
стройки порогового заданного значения Хп по формуле
,к
Хп Х -6.V21nCl.6 /2tr6 1n((t))4 . + +Л%,(5)
t
Q 5 20
16
где P,fp(C) - допустимая вероятность безаварийной работы на интервале Т;
С - вклад периодической составляющей в определение
п
Рассматривая С как функцию С f( 6л, AS, Wg, (0)i;) в 2 получена конкретизация уравнения регрессии, аппроксимирующей эту функциональную зависимость для диапазонов измерений аргумента, которые охватывают значительную часть встречающихся на практике объектов управления и условий их функционирования.
Определив оценки параметров случайного процесса X на скользящем интервале и по зависимостям
(,1 6 - A,V2; (6) 6 6 - (7)
Ад V2 17((6 ) - Нх ; (8)
5
0 5 0 з
0
5
ы.
- |3i4i).. AV э Ь(б) -и: Us
где р, pj (9)
s
Л,
u)X S
оценки четвертых центральных моментов регулируемой величины Х(1) и ее производной X(t) на интервале амплитуда производной гармонического колебания , .
можно установить такое пороговое заданное значение Х, которое обеспечит необходимую надежность работы потенциально опасного объекта при наличии в изменениях регулируемой величины, кроме случайной, гармонической составляющей.
Реализацию указанных зависимостей выполняют блок 18 оценки статистических параметров регулируемой величины, блок 10 оценки статистических параметров случайной и периодической составляющих, вычислительный блок 20, блок 21 коррекции порогового заданног го значения по гармонической составляющей, блок 26 коррекции порогового заданного значения по постоянной соста вляющей 26.
Блок 18 на скользящем интервале времени О оценивает статистические параметры прогнозируемого значения Ху регулируемой величины X(t), поступающего с выхода измерителя 32 рассогласования на вход фильтра 11 низкой частоты, который усредняет их, на интервале t.
715134
Измеритель И рассогласования on-i
еделяет центрированный относительно
оцес( X(t) с. выхода дат(t,i;) случайный процесс X,j(t) как
разность сигналов
«jMKa 4 и X(t,C) с выхода фильтра 11
низкой частоты, т.е.
Ху(1:) X(t) - X(t,C); (Ю)
-t
x|() - exp{-)X(t-i; )dt t
X(t 0)
(11)
Сигнал Xy(t) с выхода измерителя рассогласования возводится в квадрат квадратором 1б и усредняется по (11) на фильтре 12 низкой частоты, сигнал с выхода которого является сценкой дисперсии регулируемой величины ff на интервале Г,
Этот же сигнал X,(t) поступает на вход дифференциатора 15, который определяет его производную Xy(t), а нвадратор 17 и фильтр 13 низкой частоты определяют оценку дисперсии про- звoднoй регулируемой величины на нтepвaЛe .
I Сигналы Xy(t), , 6 и X,,(t) по- 4тупают соответственно на входы блока 19 оценки статистических параметров случайной и периодической состав- т яющих.
Блок 19 на скользящем интервале С по зависимостям (6)i-(9) определя- фт оценки статистических параметров флучайной n(t) и периодической s(t) Доставляющих регулируемой величины
:t(t).
с выходов блока 19 сигналы 6 и Ь. , равные оценке дисперсии и оценке ;исперсии производной случайной сос- taвллющeй n(.t) на скользящем интерва .Ие , поступают на входы вычислительного блока 20, который при заданных Аварийном значений регули)уемой ве- Иичины Хд, времени осреднения и Допустимой вероятности безаварийной (заботы Р д|;р (С) по зависимости
К , X „ -il 2,21п(1.6/2,,1п(1/Рд5р(1
К12)
где Xj, - аварийное значение регули- руемой величины;
, - среднеквадратические значения регулируемой величины X(t) и ее производной C(t) оцененные на скользящем интервале времени -С,
вычисляют вклад случайной составляюМй Рдб в определении порогового
значения X,, по (5).
8
0
о 5
,
35
,
Q
55
Сигналы А - оценки амплитуды гармонической составляющей s(t) на | скользящем интервале € , „,„, 60 - оценка частоты гармонической составляющей s(t) на интервале С с выходов блока 1-9 поступают на входы блока 21 коррекции порогового заданного значения по гармонической составляющей, который при заданных значениях времени осреднения С и допустимой вероятности безаварийной работы (с) по зависимости
г- W л. к AS , , 2- С b, + b,,----
1п(1/РА1Гр ({)},(13)
которая представляет собой аппроксимацию функциональной зависимости С f(6., 6 л , Ад, (лЗд, PftgpCf), f), вычисляет вклад периодической составляющей s(t) в определение порогового заданного значения X „ по (5).
Окончательное формирование порогового заданного значения Х выполняет сумматор 22 блока коррекции порогового заданного значения по :ПОстоянной составляющей, на котором происходит алгебраическое сложение выходных си|- налов из блоков 20 и 21.
Сигнал Хц поступает на вход фильтра 2k низких частот, который вы числяет значение математического ожидания заданного значения регулируемой величины X. Измеритель 25 рассогласования вычитает из сигнала т, сигнал т, поступающий с выхода фильтра 17 низких частот, и разность подается на вход сумматора 23, где разность flmjj тх„- m суммируется с сигналом Хр в том случае, если Xj Х„. При отсутствии этого равенства суммирование не происходит и сигнал dm X используется только для формирования допуска сигналу Х. На выходе блока 26 при вводе коррекции dm X появляется сигнал Хп Х„ + дт,. Таким образом, блок 26 осуществляет корректировку порогового заданного знамения Х„ постоянной составляющей на величину &т.
Сигнал Х с выхода блока 10 защиты поступает на вход блока З коррекции динамических свойств системы, где происходит компенсация инерционности и запаздывания основного контура управления. С этой целью сигнал Xj происходит через модель основного контура регулирования, представляющую собой последовательно соединенные
модели регулятора 29, объекта 30 и датчика 31 без запаздывания и модель 27 суммарного запаздывания, которые замкнуты цепью отрицательной обратно связи. На выходе сумматора формируетс сигнал X.,, равный сумме сигнала прогноза приращения из-за изменения Х на время запаздывания вперед и сигнала рег лируемой величины X с выхода основного контура управления.
На вход модели основного контура, кроме сигнала Х поступает сигнал с выхода фильтра 33 высоких частот, обеспечивающий реальное ускорение протекания переходных процессов в объекте. Сигнал с выхода фильтра 33 высоких частот также поступает на вход сумматора 35, формирующего форсированное заданное значение Х, пос- тупающее на вход блока 7 ограничения скорости изменения, вход основного контура управления.
Таким образом, блок 3 устраняет вредное влияние запаздывания прогно- зирующей коррекцией и влияние инерционности за счет введения форсирующего звена, ускоряющего протекание переходных процессов в объекте.
В начальный момент времени при включении объекта 3 управления в работу пороговое заданное значение регулируемой величины X J, устанавливается на безопасном уровне, исключающем возникновение аварийной ситуации при наихудших из реально возможных внешних возмущений путем установки начальных условий фильтров 12 и 13 низкой частоты. При накоплении информации о случайном процесс X(t) в тече- ние скользящего интервала 1} значение Хп корректируется блоками 20 и 21 с учетом вероятностных свойств данного случайного процесса.
На входы блока 3 подаются началь- ные условия с выхода датчика k, объекта 3 и регулятора 2, которые обеспечивают плавный выход |эегу- лируемой координаты при включении объекта управления на заданное зна- чение.
Система управления потенциально опасным объектом позволяет скомпенсировать запаздывание и инерционност в основном контуре управления, что повышает эффективность управления, а также скорректировать заданное значение регулируемой координаты и точно оценить вероятность безаварийной
работы адаптивной системы управления что увеличивает надежность и эффекг тивность работы системы.
Формула изобретения
tpetbero фильтра низкой частоты, выход г ерэого квадратора соединен с входом второго фильтра низкой частоты, о т л и ))ающаяся тем, что, с целью ювышения надежности и точности сис- емы в условиях действия на объект неконтролируемых возмущений, в нее иведены блок коррекции порогового ладанного значения по постоянной сое- авляющей, блок oppeкции динами ес- сих свойств системы и второй сумма- ор, причем выход первого сумматора :оединен с первым входом блока кор )екции порогового заданного значе- ия по постоянной составляющей, вто- ой вход и выход, которого соединены оответственно с выходом фильтра низкой частоты и с вторым информационным | ход6м ключа, выход которого подклю- чен к первому входу блока коррекции динамических свойств системы и к первому входу второго сумматора,выход которого соединен с четвертым входом ()лока ограничения скорости,третий вход которого подключен к первому выходу (Злока коррекции динамических свойств
(Системы, второй выход которого соеди- .нен с вторым входом второго сумма- ., fopa и с третьим входом первого из- (йерителя рассогласования, первый ход которого соединен с вторым вхо . ом блока коррекции динамических фвойств системы.
: 2. Система по.1, отличаю- i|l а я с я тем, что,блок коррекции Порогового заданного значения по постоянной составляющей содержит сум5
0
5
матор, измеритель рассогласования, фильтр низкой частоту, причем первый вход блока соединен с первым входом сумматора, выход которого соединен с выходом блока, первый вход блока соединен через фильтр низкой частоты с первым входом измерителя рассогла- сования, второй вход которого связан с вторым входом блока, а выход соединен с вторым входом сумматора.