Изобретение относится к автоматическому управлению и защите потенциально опасных объектов и может быть, использовано в химической и горнохимичейкой промышленностях, -например,, при обжиге датолитовой руды.
Известна система автоматического поиска, содержащая модулятор, приемник; датчики, усйлитель-преобразо-ватель, блок управляющих токов и управляемый по частоте генератор прямоугольных колебаний. Поиск в такой системе ведется путем последовательного перебора всех возможных значений регулируемого параметра до момента попадания в определенную область С 1 .
Недостатком данной системы является большая длительность поиска, обус,ловленная случайностью выборки или длительностью перебора всех возможных значений регулируемого параметра.
Известна также система автоматической защиты потенциально опасного процесса, содержащая измерители сигналов рассогласования, входь которых соединены с измерительными преобразователями и блоками задающих устройств,, а выходы измерителей сигналов рассогласования подключены к входам узла
управляющих воздействий, выходы которого соединены с исполнительными механизмами. Сигналы от измерительных преобразователей поступают на измерители сигналов рассогласования. Одновременно с этим на измерители сигналов рассогласования поступают допустимые значения параметров процесса от задающих устройств. Если ка10кой-нибудь параметр оказывается больше (или меньше своего допустимого значения, то с соответствующего измерителя сигнала рассогласования поступает сигнал в узел управляющих
15 воздействий, сигналы с которого подают к объекту управления через со-, ответствующие исполнительные механизмы 2.
Недостаток указанной системы
20 состоит в невозможности управления объектом в соответствии с выбранной функцией цели, поскольку в системе отсутствует вычислитель функции цели, рассчитывающий значение функции
25 цели по значениям регулируемого и внешних параметров.
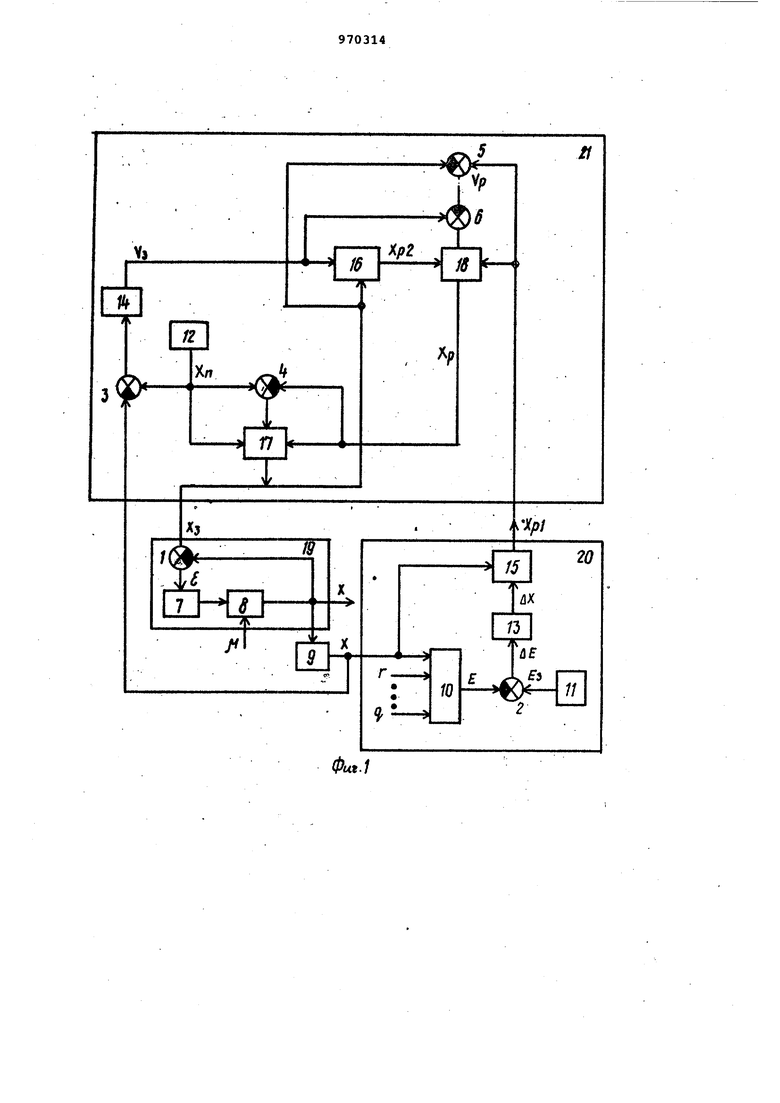
Наиболее близкой к предлагаемой является система автоматического управления, содержащая последователь30 1но соединенные первый измеритель рассогласования, формирователь сигнала управления, выход которого сое динен с входом объекта управления/, выход которого соединен с первым входом первого измерителя рассогласования и через датчик регулируемой величины - с входами вычислителя функции цели и вычислителей минимал ного и максимального значений функции цели, причем выходы источника опорного- сигнала соединены с соответствующими входами ключа, выход которого через интегратор соединен с вторым входом первого измерителя рассогласования, первый и второй уп равляющие входы ключа соединены соо ветственно через второй и третий из мерители рассогласования с выходами вычислителей .дбпустимызПмаксимального и минимального значений функций цели, выход вычислителя фун ции цели соединен с вторыми входами второго и третьего измерителей рассогласования СЗ. При вводе функции цели от регулируемой величины в определенную область регулируемая величина может оказаться больше (или меньше аварийного значения, так как в системе отсутствует контроль отклонения регулируемой величины от заданного пр рогового значения и коррекция скоро ти изменения сигнала задания регулятору в зависимости от значения этого отклонения. Кроме того, система характеризуется низкой точностью, так как из-за инерционности основного контура управления возможно удержание функции цели только в широкой области и невозможна стабилизация значений функции цели. Целью изобретения является повышение точности и надежности системы за счет предотвращения выхода регулируемой величины за аварийное знаг чение и ограничения скорости изменения и значений сигнала задания регулятору. Поставленная цель достигается тем, что система автоматического уп равления потенциально опастлм объектом, содержащая последовательно соединенные первый измеритель рассогласования, формирователь сигнала управления, объект управления, выход которого соединен с первым входом первого измерителя рассогласования и через датчик регулируемой величины - с входом вы1ислителя функции цели, выход которого соединен с первым входом второго измерителя рассогласования, третий измеритель рас согласования и первый ключ, дополни тельно содержит четвертый, пятый и шестой измерители рассогласования, блок запоминания заданного значения функции цели, блок запоминания поро гового значения, первый и второй усилители, первый и второй су1«1маторы, второй ключ, причем второй вход второго измерителя рассогласования соединен с выходом блока запоминания заданного значения функции цели,а выход через первый усилитель - с первым входом первого сумматора,второй вход которого подключен к выходу датчика регулируемой величины, а также к первому входу третьего.измерителя рассогласования, второй вход которого соединен с выходом блока запоминания порогового значения, с первым входом четвертого измерителя рассогласования и с первым входом первого ключа, а выход через второй усилитель - с входом второго сумматора, второй вход которого соединен с выходом первого ключа, с входом первого и первым входом пятого измерителя рассогласования, а выход - с первым входом второго ключа, второй вход которого соединен с выходом первого сумматора и вторым входом лятого измерителя рассогласования, а управляющий вход с выходом шестого измерителя рассогласования, первый вход которого соединен с выходом второго усилителя, второй вход - с выходом, пятого измери -еля рассогласования, выход второго ключа соединен с вторыми входами первого ключа и четвертого измерителя рассоглйсовани;, выход которого подключен к управляющему входу первого . На фиг. 1 представлена блок-схема системы; на фиг. 2 - пример графиков сигналов регулируемой величины X , задания регулятору X-j .и скорости изменения сигнала задания Vx во времени для системы без ограничения . скорости изменения сигнала задания; на фиг. 3 - пример графиков сигналов Х,Х, у) во времени для предлагаемой системы; на фиг. 4 - пример графиков ограничения скорости изменения сигнала задания д и расчетной скорости изменения сигнала задания Vn в зависимости от величины отклонения сигнала регулируемой величины X от порогового значения Xf, для предлагаемой системы. Система включает первый 1, второй 2, третий 3, четвертый 4, пятый 5 и шестой 6 измерители рассогласования, формирователь 7 сигнала управления, объект 8 управления, датчик 9 регулируемой величины, вычислитель 10 функции цели, блок 11 запоминания заданного значения функции цели, блок 12 запоминания порогового значения, первый 13 и второй 14 усилители, первый 15 и второй 18 сумматоры, первый 17.и второй 18 ключи, основной контур 19 управления 5лок 20 подстройки и блок 21 защиты. На чертежах также даны сигнал рассогл j oBaHHH , регулируемая величина X сигнал задания регулятору Х, функция цели Е,внешние возмущения //, внешние параметры гg, заданное значение функции цели ,сигнал рассогласования функции т;ели ДЕ , сигнал коррекции дХ , расчетная вел чина сигнала задания регулятору бе ограничения по скорости изменения I расчетная величина сигнала за дания регулятору с ограничением по скорости изменения Хр , расчетная величина сигнала задания регулятору Хр, расчетная без ограничения скорость изменения сигнала задания регулятору VP, расчетная величина ограничения скорости изменения сигнала задания регулятору V- , пороговое значение регулируемой величины Хр, аварийное значение регулируемой величины Ха г скорость из,менения сиг нсша задания . Алгоритм работы предлагаемой си темы описывается следующими соотношениями : W(p) V - i Хр.приXH - Хр1 0; I Хп,приХр - Хр 60; V РИV - Vp70; р IXp. -при Vp$0; .(Xn- X) ; % + дХ; ЬХ--Yi-u.E ,U,E E; E E(X,r,. .. ,q), где W(p} - передаточная функция основного контура 19; - коэффициент пропорциональности;К - коэффициент передачи по каналу X - Е; Е Кр+. + f .. .+ - функ ция цели от регулируемой величины Х внешних параметров г , ... ,q. Система работает следующим образом. В основном контуре 19 управления формирователь 7 сигнала управления вырабатывает управляющий сигнгш .на объект 8 таким образом, чтобы расг согласование Е. Ху- X было минимальным, т.е. основной контур 19 управления отрабатывает изменение сигнала задания регулятору Хуи (или изменение значений внешних возмущений f и блоке 20 подстройки вычислитель функции цели по значениям регулируемой величины X, поступающей с датчика 9, и по значениям внешних параметров r,...,q определяет значение функции цели Е . На выходе второго измерителя 2 рассогласования получают, сигнал рассогласования функции цели дЕ, т.е. величину отклонения функции цели Е от заданного значения Е. Для устранения сигнала ДЕ производят коррекцию сигнала задания. Расчетную величину сигнала задания Хр определяют как сумму сигналов регулируемой величины X и сигнала коррекции &Х. Величина ЛХ определяет такое значение изменения сигнала X, при котором изменение значения функции цели Е происходит на величину ДЕ. Для этого сигнал дЕ усиливают в усилителе 13. при этом коэффициент усиления.усилителя 13 равен Kl..Точность отработки сигнала рассогласования дЕ в предлагаемой системе определяется только точностью отработки основным контуром 19 управления Зсодан1ш X и точностью расчета в вычислителе 10 значений функции цели Е и не зависит от инерционности объекта 8 управления. Расчитанная величина сигнала задания хр поступает в блок 21 защиты, где происходит ограничение скорости изменения расчетной величины сигнала задания. Для этого на выходе пятого измерителя 5 рассогласования получают расчетную без ограничения скорость изменения сигнала задания регулятору VP как разность между рассчитанным в блоке 20 подстройки значением сигнала Хр и текущими значением сигнала задания Х на входе в основной контур 19 управления. Расчетную скорость Mf сравнивают на шестом измерителе б рассогласования с расчетной величиной ограничения скорости Vo. Если расчетная Скорость VP меныче расчетной величины ограничения скорр,сти V-j., т.е. Ур7/0 I (точки t., ц на фиг. 4 ), то положительный сигнал с выхода шестого измерителя 6 .рассогласования поступает на управляющий вход второго ключа 18, при этом выход последнего подключают к первому входу второго ключа 18, и на первый вход первого ключа 17 поступает сигнал Хр. И н оборот, если V - (точки Ч, tj на фиг.4), то выход второго ключа 18 подключают ко второму входу второго ключа 18,и на первый вход первого ключа 17 поступает сигнал Хр. Сигнал Хр получают на втором сумматоре как сумму текущего значения сигнала задания Х на входе в основной конTyp 19 управления с расчетной величиной ограничения скорости V.. Таким образом, скорость изменения си нала Хр на выходе второго ключа 18 не превышает расчетную величину ог раничения скорости V . Сигнал V получают на выходе второго усилителя 14 с коэффициентом усиления К на который подают сигнал с выхода третьего измерителя 3 рассогласования, где сравнивают сигналы с блока 12 запоминания порогового значения регулируемой величины и с выхода датчика 9 регулируемой в.еличины. Расчетная величина ограничения скорости V. пропорциональна вели чине разности порогового значения регулируемой величины Хд и значения регулируемой величины Х, т.е.. Vej, К. ( X) , и чем ближе Находится значение X к своему пороговому значению Xj, тем меньше становится допустимая величина V 1ФИГ. 4). На первом ключе 17 происходит ограничение расчетной величины сигнала задания. Для этого на четверToRi измерителе 4 рассогласования сравнивают пороговое значение Х, с расчетной величиной Хр. Если Хп- , то выход первого ключа 17 подключают к первому входу перво:7о ключа 17, и в основной контур 19 управления поступает сигнал X irpa фик фиг. 3 йри t t,, . И на оборот-, при Х Хр О выход п&рвого к ча 17 подключают к второму входу первого ключа 17, и в основной контур 19 управления поступает сигнал (график Xjj-на фиг. 3 при t t ) . Ограничение расчетной величины сигнала задания Ур, которое происходит на первом ключе 17, необходимо для того, чтобы регулируемая величи на X не превысила аварийное значение Хд. В зтом случае (при Xn хотя и не удается полностью устрани сигнал рассогласования функции дели лЬ , регулируемая величина X не нарушает аварийного значения УО. Одна ко выполнение блока 21 защиты без ограничения скорости изменения сигнала задания, которое происходит на втором ключе 18, не всегда обеспечивает предотвращение нарушения регулируемой величиной X своего аварийного значения . 2). Это связано.с тем, что в момент t , когда значение времени сигнала Х становится равным значе нию Хп наблюдается резкий перепад скорости изменения сигнала задания Vjcx (фиг. 2). При t t , хотя сигн задания Х- равен пороговому значению Хп из-за инерционности объек та 8 управления регулируемая велич на X продолжает возрастать и может превысить аварийное.значение ) Ве роятность нарушения сигналом X аварийного значения Х, тем больше, чем больше перепад скорости Vj в точке t .. Для предотвращения возможных нарушений сигналом V -аварийного значения XQ в блоке 21 защиты предусмотрено ограничение скорости изменения расчетной величины сигнала задания, которое происходит на втором ключе 18. В этом случае (фиг. З; скорость сигнала задания тем меньше, чем ближе находится регулируемая величина X от порогового значения Х,, и в момент достижения сигналом X порогового значения Хр перепад скорости сигнала задания V равен нулю. Пример. Для технологического процесса обжига датолитовой руды регулируемой величиной X является температура обжига. Основным контуром 19 управления является контур регулирования температуры обжига пу; тем изменения подачи топлива в прокалочную печь. Функцией целиЕ является степень перехода борного ангидрида из одной формы в другую. Внешними параметрами г,. ..,q, влияющими на функцию цели Е , являются расход руды в печь и гранулометрический состав руды. Для температуры обжига существует аварийное значение Х.а, превышение которого ведет к нарушению технологического режима ( ) поэтому на значение задания регулируемой величины Х- наложено ограничение . Оно не должно превышать порогового XT, (Х„ ). При изменении расхода руды в печь и (или) изменении гранулометрического состава руды происходит изменение функции цели. Для устранения отклонения функции цели от заданного значения в блоке подстройки происходит .расчет нового задания регулятору температуры обжига, при котором функция цели принимает заданное значение. Рассчитанная величина сигнала задания с блока 20 подстройки поступает в блок 21 защиты, где происходит ограничение скорости изменения сигнала, задания и значения сигнала за-. Дания, что обеспечивает предотвращение выхода температуры обжига за аварийное значение. Применение предлагаемой системы повышает точность управления в 1,5 2 раза, позволяет предотвратить выход регулируемой величины за аварийное значение, что повышает производительность оборудования на 5 - 10% благодаря предотвращению аварийных ситуаций. Формула изобретения Система автоматического управления потенциально, опасным объектом.
СЛЯёржащая последовательно соединенные первый измеритель рассогласования, формирователь сигнала управления, объект управления, выход которого соединен с первым входом первого измерителя рассогласования и через датчик регулируемой величины - с входом вычислителя функции цели, выход которого соединен с первым входом второго измерителя рассогласования, третий измеритель рассогласования и первый ключ, отличающаяся тем, что, сцелью повьидения точности и надежности, она дополнительно содержит четвертый, пятый и шестой, измерители рассогласования, блок запоминания заданного значения функции цели, блок запоминания порогового значения, .первый и второй усилители, первый и второй сумматоры, второй ключ, причем второй вход второго измерителя рассогласования соединен с выходом блока запоминания заданного значения функции цели, а выход через первый усилитель - с первым входом первого сумматора, второй вход которого подключен к выходу датчика регулируемой величины, а также к первому входу третьего измерителя рассогласования, второй вход которого соединен с выходом блока запоминания порогового значения, с первым входом четвертого измерителя рассогласования и с первым входом первого ключа, а выход через второй усилитель - с входом второго сумматора, второй вход которого соединен с выходом первого ключа,с вторым
входом первого и первым входом пятого измерителей рассогласования, а выход - с первым входом второго ключа, второй вход которого соединен с выходом первого сумматора и вторым
входом пятого измерителя рассогласования, а управляющий вход - с выходом шестого измерителя рассогласования., первый вход которого соединен с выходом второго усилителя, ВТО
рой вход - с выходом пятого измерителя рассогласования, выход второго ключа соединен с вторыми входгми первого ключа и че-гвертого измерителя рассогласования, выход которого подключей к управляющему входу первого клю«.
Источники информации, принятые во внимание при экспертизе I 1. Авторское свидетельство СССР 330429, кл. G 05 В 13/02, 1970.
2. Обновленский П.А. Система защиты потенциально опасных процессов химической технологии Л., Химия, 1978, с. 26.
3. Авторское свидетельство СССР № 557349, кл. G 05 В 11/01, 1975 (прототип).
Yj
4-9
€)
ft
XX)tf
X/;2
fd




| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Система автоматического управления | 1975 |
|
SU557349A1 |
| Система автоматического управления | 1978 |
|
SU708300A2 |
| Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой | 2017 |
|
RU2671613C1 |
| Устройство для составления смеси заданного состава | 1983 |
|
SU1196819A1 |
| Устройство для автоматического регулирования частоты и перетоков мощности энергообъединения | 1985 |
|
SU1302374A2 |
| Система автоматического управления | 1976 |
|
SU646305A1 |
| Интегральный регулятор | 1982 |
|
SU1297007A1 |


Xff
X
.
Xj
/J
/(
-Xpj
2(
/j
ЛХ
/3
df 3
11
/0
2
ff
Д/7
г/f.e
