(/)
4 Ю
сл
о
4 СЛ
/г
Изобретение относится к станкостроению и может быть использовано S механизмах стопорения и фиксации 1одвижных органов станков.
Целью изобретения являете повы- пение точности и надежности за счет Отстранения действия ударных и дина- нических нагрузок на запирающие рг- : аничители. .
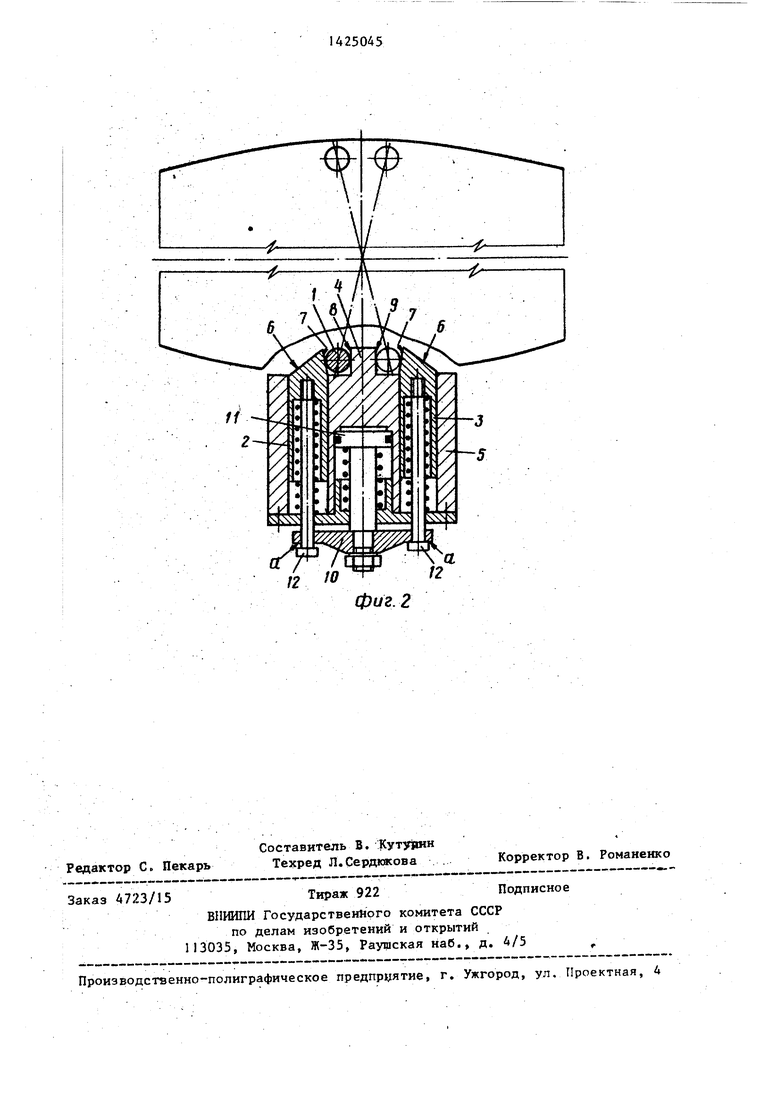
На фиг. 1 изображено устройство ,1Я стопорения подвижного органа с дополнительным ограничителем, выполненным с возможностью осевого перемещения и связанным с приводом , на фиг. 2 - то же, с дополнительным Ьграничителем, жестко связанным с орпусом.
I Устройство для стопорения подвиж иого органа станка содержи,т упоры - пальвд ,1 , закрепленные на подвижном органе подпружиненные запирающие ограничители 2 и 3 и дополни- гельиый ограничитель 4, расположенный на неподвижном органе 5 между Запирающими ограничителями на оди- |наковом расстоянии от последних.
Каждый из запирающих ограничителей 2 и 3 вьтолнен с двумя поверхностями, вспомогательными 6 и рабочда И 7, причем рабочие поверхности 7 обращены к рабочим поверхностям 8 и 9 дополнительного ограничителя 4, а вспомогательные поверхности 6 расположены с внешних :Сторон от ограничителя 4. Углы наклона поверхностей 6 выбираются конструктивно так, чтобы обеспечивалось утаплизание запирающих ограничителей 2 и 3 при взаимодействии по этим поверхностям пальцер 1. Углы наклона поверхностей 7 выбираюся так, чтобы обеспечивалось самотоможение запирающих ограничителей 2 и 3 при давлении на указанные поверхности пальцев 1 в процессе стопорения. Ограничители 2 и 3 связаны с тягой 10 привода 11, например гидроцилиндра, посредством стержней с буртиками 12 и имеют возмо- ность перемещения под воздействием на них пальцев 1 при выключенном приводе. Дополнительньй огратйи- тель 4 жестко соединен с приводом и установлен на неподвижном органе 5 в плоскости симметрии с возможностью осевого перемещения (фиг. 1) или жестко закреплен .на неподвижном органе 5
Ьнг. 2). Пальи г 1 смещены
0
5
0f
0
5
0
5
0
5
в плоскости симметрии на величину полусуммы толщины дополнительного ограничителя 4 и диаметра пальцев 1. В застопоренном положении подвижного органа палец 1 заклинен между поверхностью 7 ограничителя 2 и поверхностью 8 дополнительного ограничителя 4 или между поверхностью 7 запирающего Ъграничителя 3 и поверхностью 9 ограничителя 4, при этом буртик 12 стержня запирающего ограничителя, участвующего в процессе сто.порения, не доходит до поверхности а тяги 10 привода на некоторую величину. В рас- стппоренном положении привод включен и запирающие ограничители 2 и 3 утоплены, утоплен также дополнительный ограничитель 4 изображенный на фиг. 1, где показано расположение пальцев 1 подвижного органа станка при вращении его по часовой стрелке.
Устройство для стопорения подвижного органа станка работает следующим образом.
В исходном положении привод выключен и запирающие ограничители 2 и 3, а также дополнительный ограничитель 4 под действием пружин выдвинуты относительно неподвижного органа 5, при этом буртики 12 стержней ограничителей 2 и 3 поджаты к поверхности а тяги 10 привода.
При стопорении палец 1 подходит, например, слева к ограничителю 2 и утапливает его за счет воздействия на вспомогательную поверхность 6, проходит в пространство между ограничителями 2 и 4 и, дойдя до соприкосновения с поверхностью 8 ограничителя 4, останавливается. Одновременно ограничитель 2 под действием пружины, скользя, рабочей поверхностью 7 по пальду 1, выдвигается и заклинивает последний, который в обратном направлении не в состоянии утопит ограничитель 2 из-за наличия самоторможения последнего. При подходе пальца справа, со стороны ограничителя 3, процесс стопореняя производится идентично описанному, но в работе участвуют поверхность 9 ограничителя 4 и ограничитель 3. Поменяется и изображенное положенне: бур- TI-3K 12 стержня ограничителя 2 касается поверхности а тяги 10 привода, а буртик 12 стержня ограничителя З не доходит до поверхности а на такую же велг-1чину.
При расстопорении включается привод, который своей тягой 10 нажимает на буртики 12 стержней ограничителей 2 и 3, утапливает последние в неподвижный орган 5 станка, при этом утапливается также ограшгчитепь 4.После поворота подвижного органа станка и ухода фиксирующего пальца 1 из зоны
щее расположенные в корпусе, предназначенные для взаимодействия с упо рами и выполненные с рабочими и вспомогательными поверхностями два подпружиненных запирающих ограничители и привод их перемещения, о т л и ;- чгющееся тем, что, с целью повьшения точности и надежности, уст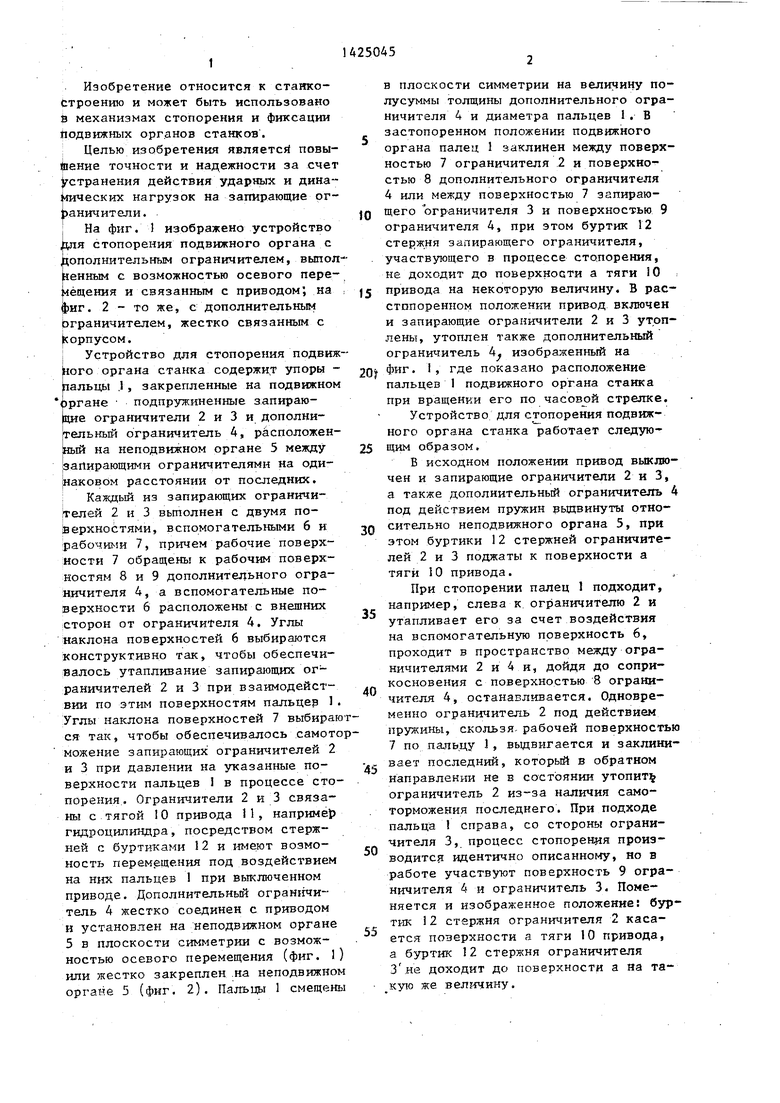

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стопорения подвижного органа | 1987 |
|
SU1491660A1 |
| Устройство для стопорения подвижного узла относительно неподвижного | 1989 |
|
SU1722785A1 |
| Устройство для стопорения подвижного органа | 1972 |
|
SU536932A1 |
| Устройство для стопорения подвижного органа относительно неподвижного | 1986 |
|
SU1342662A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Силовая головка для многопроходной обработки внутренних поверхностей | 1983 |
|
SU1085698A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| СТУПЕНЧАТЫЙ ПЕРЕКЛЮЧАТЕЛЬ ПЕРЕДАЧ ЧУРИКОВА ДЛЯ ТРАНСМИССИИ С БЕСКОНЕЧНОЙ ЦЕПЬЮ | 1992 |
|
RU2038253C1 |
| Устройство для фиксации подвижного узла станка | 1986 |
|
SU1395459A1 |
| СТАНОК ДЛЯ НАПРАВЛЕННОГО РАСКОЛА ГОРНЫХ ПОРОД | 1991 |
|
RU2011819C1 |
Изобретение относится к станко- строеюоо и может быть, использовано в механизмах стопорения и фиксации подвижных органов станков. Целью изобретения является повышение точности и надежности за счет устранения действия ударных и динамических нагрузок на запирающие ограничители. При сто- порении подвижното органа пальцы I подходят, например, слева к запирающему ограничителю 2 и утапливают его за счет воздействия на вспомогательную поверхность 6, проходят в пространство между ограничителями 2 и 4 и, дойдя до соприкосновения с поверхностью В дополнительного ограничителя 4, останавливаются. Одновременно запирающий ограьэичитель 2 под действием пружины, скользя рабочей поверхностью 7 по пальцу 1, заклинивает последний. 2 з.п, ф-лы, 2 ил.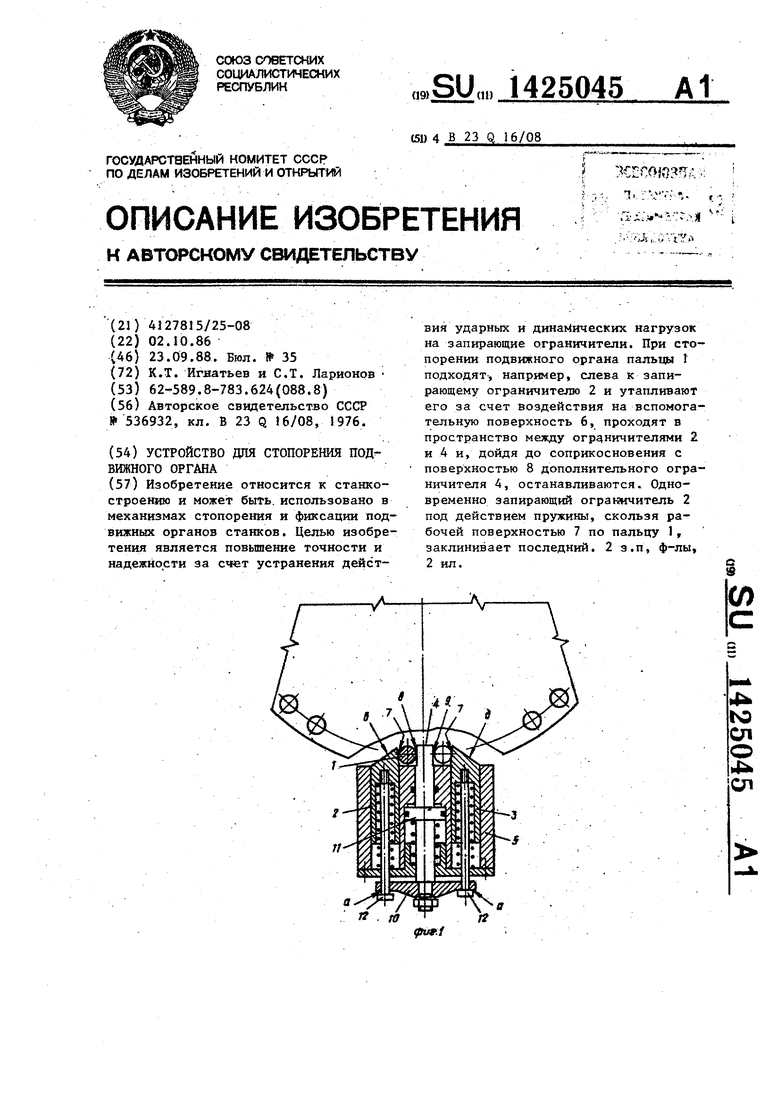
вьщвижения ограничителей 2 и 3 выклю- д. ройство снабжено дополнительным orpiaчается привод и ограничители 2 и 3, а также ограничитель 4 возвращаются в исходное положение.
Устройство для стопорения подвижного органа станка с дополнительным ограничителем,жестко связанньм с корпусом, работает аналогичным образом, но после расстрпорения подвижный орган перемещается в обратном направлении.
Формула изобретения
,15 упорами подвижного органа.
20 3. Устройство по п. 1, отличающееся тем, что дополнительный ограничитель размещен в корпусе с возможностью перемещения и связан с приводом перемещения запимерно по окружности упорами, содержа- 25 ракщих ограничителей.
ничителем, расположенным между запирающими ограничителями на одинаковом расстоянии от посЕпедних и предназначенным для контактирования с
упорами подвижного органа.
фиг. 2
| Устройство для стопорения подвижного органа | 1972 |
|
SU536932A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
