Изобретение относится к устройствам складирования грузов и может быть применено в технологических линиях и установках для пооперационного накопления и обработки изделий, а также в качестве устройства для вертикального перемещения грузов.
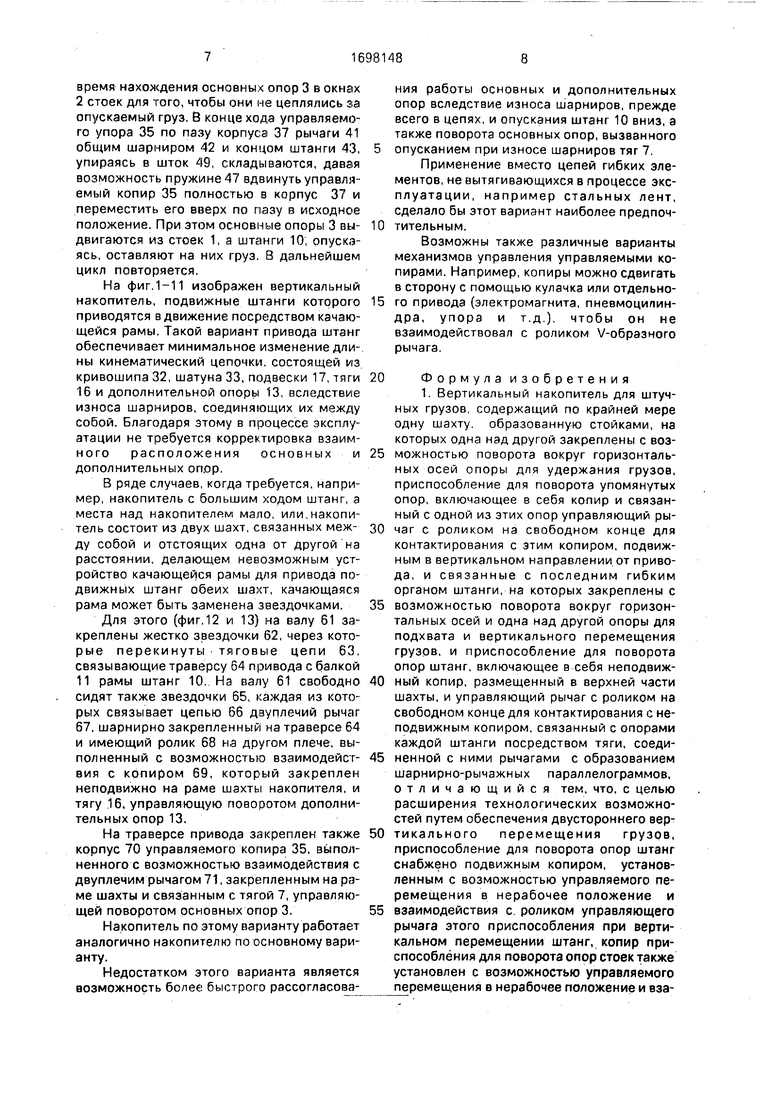
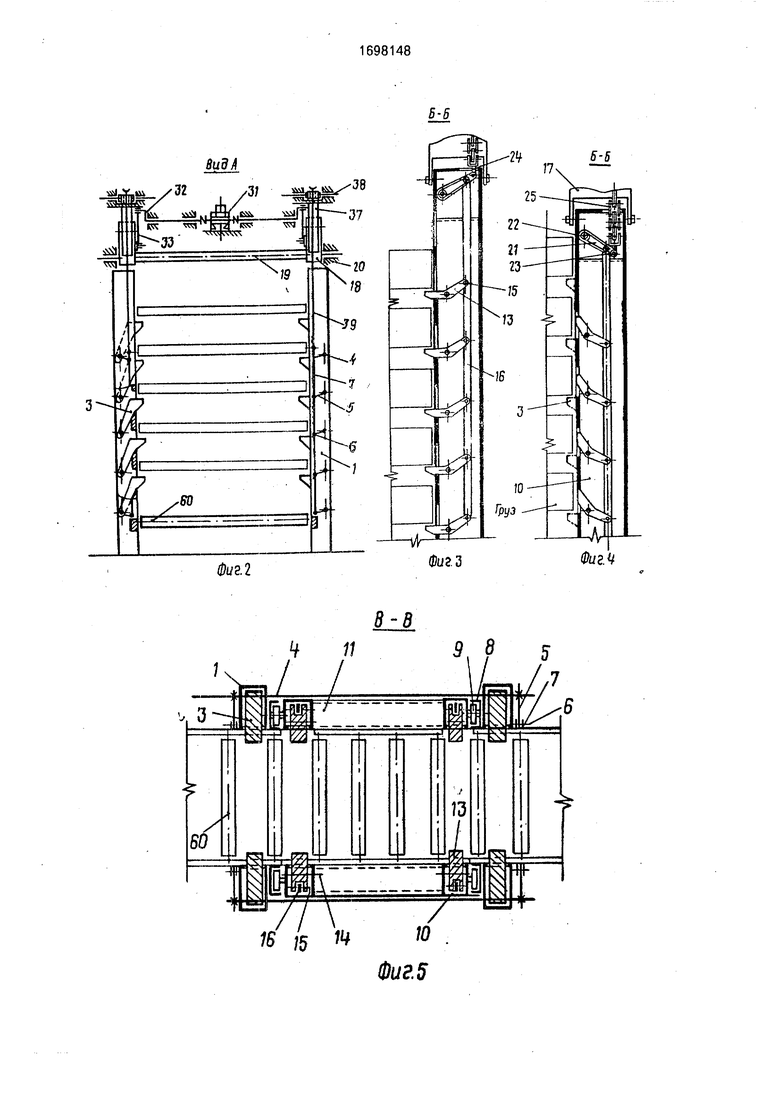
На фиг.1 .изображен вертикальный накопитель, общий вид, разрез; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.1 (положение дополнительных опор, тяг и рычагов при захвате и транспортировании груза; на фиг.4 - то же, положение тяг, рычагов и дополнительных пор при освобождении последних от груза; на фиг.5 - разрез В-В на фиг.1; на фиг.6 - узел I на фиг.отображает положение механизма управляемого копира подьема-опускания основных опор стоек при работе накопителя в режиме опускания груза в момент, когда штанги достигли верхнего положения и начинают ход вниз); на фиг.7 - то же, в момент, когда
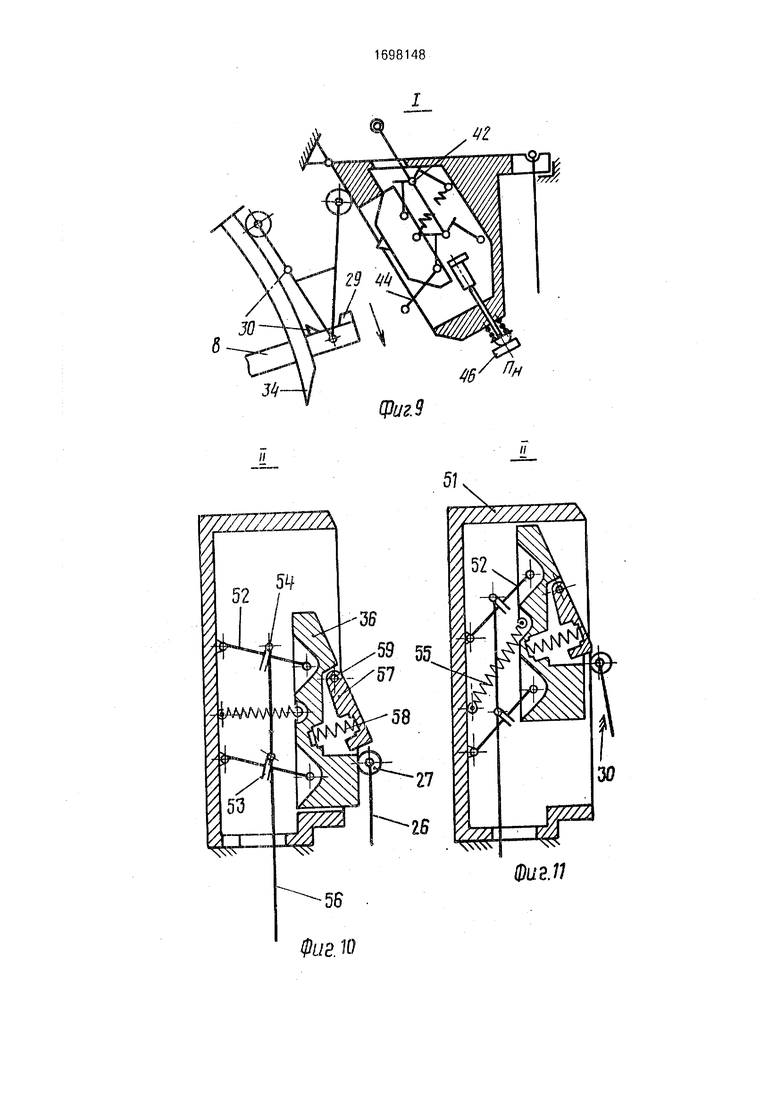
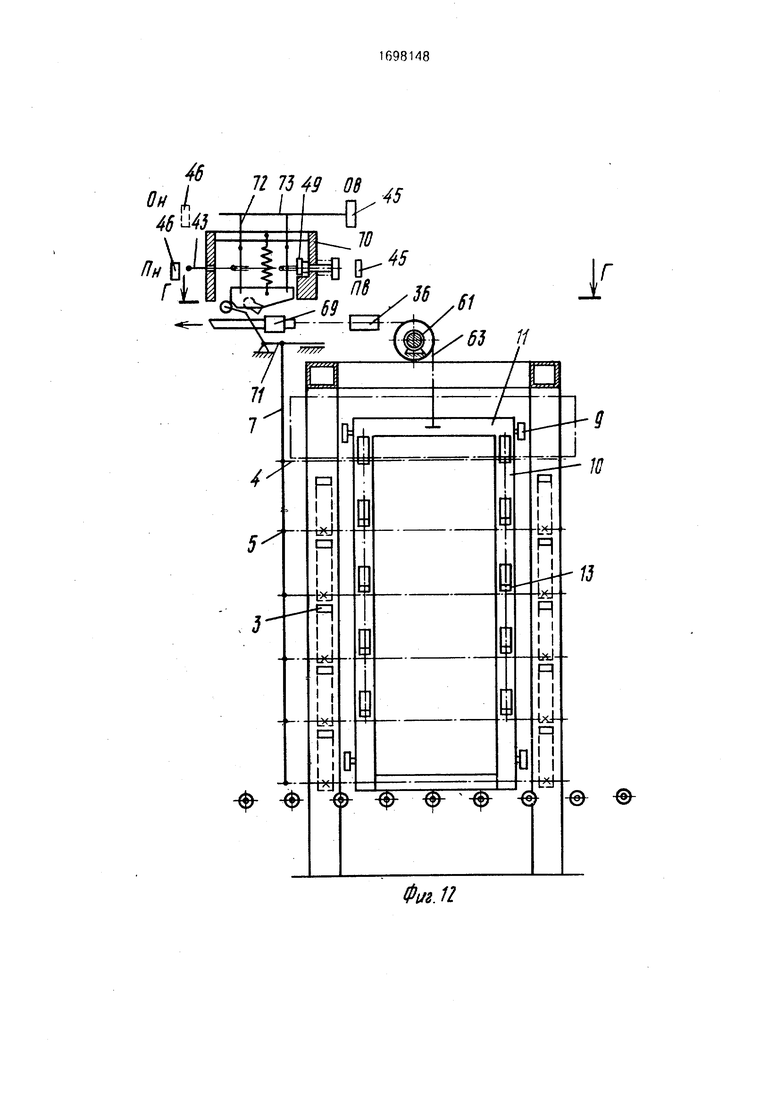
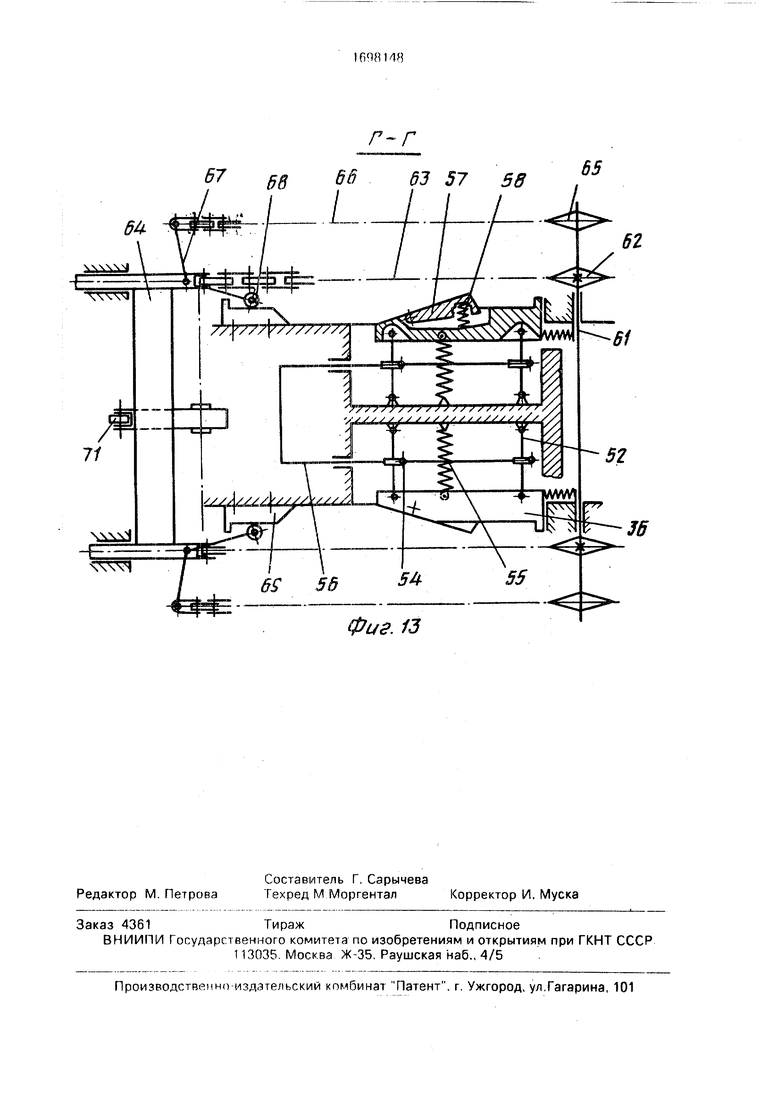
штанги закончили перемещение груза вниз мимо удерживаемых в поднятом положении основных опор, управляемый копир входит в свой корпус, а основные опоры стоек выдвигаются для принятия опускаемого груза; на фиг.8 - то же, при работе накопителя в режиме подъема груза в момент, когда штанги подняли груз почти до касания снизу с основными опорами и начинается вдвиже- ние основных опор в стойки; на фиг.9 - то же, в момент, когда ход штанг вверх закончен и подготовлен ход вниз; на фиг. 10 и 11 -узел II на фиг.1 отображает моменты работы управляемого копира подъема-опускания дополнительных опор штанг при подходе последних к нижнему положению; на фиг.12 - вертикальный накопитель, общий вид, разрез (вариант исполнения); на фиг.13 - разрез Г-Г на фиг.12.
Вертикальный накопитель состоит из образующих шахту неподвижных стоек 1, в
О
ю
00
Ј
00
обращенных к грузам стенках которых выполнены окна 2 для прохода основных опор 3 для удержания грузов, размещенных внутри стоек 1 на осях 4 с возможностью поворота вместе с осями 4 и рычагами 5, закрепленными на осях 4 и связанными с помощью пальцев 6 с тягами 7. Стойки 1, рычаги 5 и тяги 7 образуют ряд шарнирных параллелограммов. В направляющих8, прикрепленных к стойкам 1, размещены катки 9, закрепленные на подвижных штангах 10, каждая пара которых связана в раму балками 11. В окнах 12 штанг 10 размещены дополнительные опоры 13 для подхвата и вертикального перемещения грузов, установленные на осях 14, закрепленных в стенках штанг 10. Дополнительные опоры 13 с помощью пальцев 15 присоединены к тягам 16, образующим с ними шарнирные параллелограммы.
Каждая пара штанг 10, связанных в раму, с помощью подвесок 17 шарнирно прикреплена к качающейся раме 18, входящей в состав привода штанг и закрепленной с помощью оси 19 в подшипниках 20 рамы неподвижных стоек 1. Тяги 16 каждой пары штанг 10 подсоединены шарнирно к рычагам 21, закрепленным неподвижно на валу 22, жестко соединенным с рычагом 23, к которому с помощью переходной серьги 24 прикреплен гибкий элемент, например цепь 25, присоединенный через отклоняющий ролик к V-образному рычагу 26 с роликами 27 и 28, шарнирно закрепленному на качающейся раме 18 Величина его качания ограничена упорами 29 и 30.
Качающаяся рама 18 связана с редуктором 31 привода кривошипами 32 и шатунами 33.
На раме стоек 1 закреплены неподвижный копир 34, установленный с возможностью взаимодействия с роликом 27, и управляемый копир 35 подъема-опускания основных опор 3, установленный с возможностью взаимодействия с роликом 28 рычага 26 в период нахождения качающейся рамы 18 в верхнем положении.
Управляемый копир 36 (фиг. 10) установлен с возможностью взаимодействия с роликом 27 V-образного рычага 26 в периоды нахождения качающейся рамы 18 в нижнем положении.
Управляемый копир 35 размещен в корпусе 37, шарнирно прикрепленном к раме стоек 1 цапфами 38 и соединенном с тягой 7 связью 39 и осью 40 (фиг.7), на рычагах 41, образующих с корпусом 37 и управляемым копиром 35 два параллелограмма с общими шарнирами 42, которые связаны между собой штангой 43
Один из рычагов 41 снабжен вторым плечом 44. Штанга 43 и плечо 44 предназначены для перевода управляемого копира 35 из положения, когда он выступает из корпуса 37, в положение, когда он в нем утоплен, и обратно при помощи передвижных упоров 45 и 46, связанных с качающейся рамой 18 и перемещающихся вместе С ней. Передвижные упоры 45 и 46 имеют каждый по
0 два фиксированных положения: упор 45 - положения ПВ и Ов; упор46-положения Пн и Он.
Управляемый копир 35 кроме рычага 41 связан с корпусом 37 пружиной 47, прижи1
5 мающей его к верхней стенке паза, выполненного в корпусе 37. В управляемом копире 35 выполнено гнездо, в котором шарнирно закреплен подпружиненный упор 48, выступающий в нормальном поло0 жении из управляемого копира 35.
В нижней стенке корпуса 37 размещен шток 49, выполненный с возможностью взаимодействия с общим шарниром 42 и нижним концом штока, а также другим концом
5 с управляющим упором 46. Пружина 50 удерживает шток в крайнем нижнем положении.
Управляемый копир 36 размещен в корпусе 51 на рычагах 52 с упорами 53, предот0 вращающими складывание рычагов вокруг общих шарниров 54 в другую сторону. Шарнирный параллелограмм стянут пружиной
55.Общие шарниры 54 соединены штангой
56,предназначенной для выпрямления и 5 складывания рычагов 52 при выборе направления движения грузов в шахте.
В гнезде, выполненном в теле управляемого копира 36 (фиг. 10), размещен утапливаемый упор 57 с пружиной 58, связанной с
0 копиром 36 осью 59. Для подачи грузов в накопитель и из него служит рольганг 60.
Накопитель работает следующим образом.
Между стойками 1 груз по рольгангу 60
5 подается в шахту. При включении привода редуктор 31 кривошипами 32 через шатуны 33 перемещает качающуюся раму 18 вниз, опуская связанные с ней подвесками 17 штанги 10. Ролик 27 V-образного рычага 26, закрепленного на качающейся раме, скаты0 вается с копира 34, и дополнительные опоры 13 штанг под действием своего веса и веса тяг 16 поворачивается на осях 14, уходя в тело штанг. Поворот происходит до тех пор, пока V-образьый рычаг не достигнет
5 упора 30.
Возможны два режима работы шахты: подъем грузов (накопление) и опускание груза (выдача). В режиме подъема при ходе штанг 10 вниз дополнительные опоры 13
убраны в тело штанг и остаются в таком положении до тех поп. пока штанги не опустятся настолько, чтобы опоры 13 можно было выдвинуть из штанг 10, не задевая ими грузы, расположенные на рольганге 60 и основных опорах 3. Выдвижение дополнительных опор производится подъемом тяги 16, которая через рычаг 21, вал 22, рычаг 23 и серьгу 24 связана с цепью 25 с V-образным рычагом 26, поворачивающимся при набегании ролика 27 на копир 36 и натягивающим цепь 25.
Чтобы при обратном ходе штанг произошел подхват грузов дополнительными опорами 13, необходимо, чтобы ролик 27 не скатился с копира 36 слишком рано. Для увеличения продолжительности воздействия копира 36 на ролик 27 и на дополнительные опоры 13 в копире 36 размещен утапливаемый подпружиненный упор 57. Упираясь в последний при ходе штанг 10 вверх,.ролик 27 поворачивает копир 36 на выпрямленных рычагах и растягивает пружину 55 до тех пор, пока копир 36 не будет утоплен в корпусе 51, а ролик 26 не сможет перекатиться через утапливаемый упор 57 и скатиться с корпуса 51 по кромкам гнезда утапливаемого упора. При этом V-образный рычаг упрется в упор 30, цепь 25 ослабнет, а тяга 16 будет удерживаться на пальцах 15 дополнительных опор 13, подхвативших груз.
При подходе качающейся рамы 18 к верхнему положению ролик 27 накатывается на неподвижный копир 34, поворачивает V-образный рычаг и натягивает цепь 25. При дальнейшем перемещении качающейся рамы 18 вверх ролик 28 накатывается на управляемый копир 35 и через выпрямленные рычаги 41 поворачивает корпус 37 копира, поднимая связь 39, тягу 7, поворачивая рычаги 5 и утапливая основные опоры 3 в окнах 2 стоек 1. Благодаря этому боковые кромки поднимаемого груза не касаются опор, не соударяются с ними и не вызывают сотрясений, нежелательных при перемещении ряда грузов, например песчаных стержней в сушилках. После того, как грузы подняты выше утопленных основных опор 3, последние выдвигаются из окон 2, что происходит при скатывании ролика 28 с управляемого копира 35 и возвращении его корпуса 37 в исходное положение.
На этом ход штанг 10 вверх заканчивается.
Для того, чтобы при последующем ходе штанг вниз груз мог быть переложен с дополнительных опор 13 на основные опоры 3, необходимо оставить последствие в выдвинутом из окон 2 положении. Для этого корпус 37 не должен поднять тягу 7. Достигается это утапливанием управляемого копира 35 в корпусе 37, для чего при подходе к крайнему верхнему положению упор 46
(фиг.9), связанный с касающейся рамой 18, установлен в положение Пн, в котором он вдвигает шток 49, складывая рычаги 41
При ходе вниз ролик 28 прокатится над управляемым копиром 35, а когда ролик 27
0 скатится с неподвижного копира 34, V-образный рычаг 26 повернется до упора 30 и дополнительные опоры 13 спрячутся в штангах 10.
При подходе штанг 10 к нижнему поло5 жению процесс повторится./
При этом передвижной управляющий упор 45, находящийся в положении Пв (фиг.9), перемещая штангу 43, выпрямит рычаги 41 и выдвинет управляемый копир 35
0 из корпуса 37, закончив цикл и подготовив накопитель к приему следующего груза.
Для перевода накопителя в режим опускания грузов управляющие упоры 45 и 46 устанавливают в положение Ов и Он, штангу
5 56 (фиг.11) выдвигают из корпуса 51, складывая рычаги 52, в результате чего копир 36 опустится в паз корпуса 51. Качающаяся рама 18, продолжая опускаться после переключения упоров 45 и 46 и штанги 56, идет
0 к нижнему положению, ролик 27, достигнув корпуса 51, катится по его поверхности над утопленным копиром 36, не вызывая поворота V-образного рычага 26, а дополнительные опоры 13 остаются погруженными в
5 штанги 10.
При подходе к верхнему положению качающейся рамы 18 ролик 27 накатывается на неподвижный копир 34, поворачивая V- образный рычаг 26 и выдвигая через кине0 матическую цепочку дополнительные опоры 13 из штанг 10.
При дальнейшем перемещении качающейся рамы 18 вверх дополнительные опоры 13 подхватят груз, лежащий на основных
5 опорах 3, а ролик 28 покатится по поверхности корпуса 37, не вызывая его поворота, так как копир 35 утоплен в нем. В конце хода качающейся рамы 18 вверх упор 45, установленный в положение Ов (фиг.6), нажмет
0 на плечо 44 рычага 41 и, повернув его, вы- , двинет копир 35 из корпуса 37.
При последующем ходе вниз ролик 28 накатывается на управляемый копир 35 и поворачивает через систему тяг и рычагов
5 основные упоры 3, заводя их в окна 2 стоек 1 и открывая шахту для прохода груза вниз. Опускаясь ниже, ролик 28 упирается в утапливаемый подпружиненный упор 48 и, растягивая пружину 47, смещает управляемый упор 35 вниз по пазу корпуса 37, увеличивая
время нахождения основных опор 3 в окнах 2 стоек для того, чтобы они не цеплялись за опускаемый груз. 8 конце хода управляемого упора 35 по пазу корпуса 37 рычаги 41 общим шарниром 42 и концом штанги 43, упираясь в шток 49, складываются, давая возможность пружине 47 вдвинуть управляемый копир 35 полностью в корпус 37 и переместить его вверх по пазу в исходное положение. При этом основные опоры 3 выдвигаются из стоек 1, а штанги 10, опускаясь, оставляют на них груз. В дальнейшем цикл повторяется.
На фиг.1-11 изображен вертикальный накопитель, подвижные штанги которого приводятся в движение посредством качающейся рамы. Такой вариант привода штанг обеспечивает минимальное изменение дли-, ны кинематический цепочки, состоящей из кривошипа 32, шатуна 33, подвески 17, тяги 16 и дополнительной опоры 13, вследствие износа шарниров, соединяющих их между собой. Благодаря этому в процессе эксплуатации не требуется корректировка взаимного расположения основных и дополнительных опор,
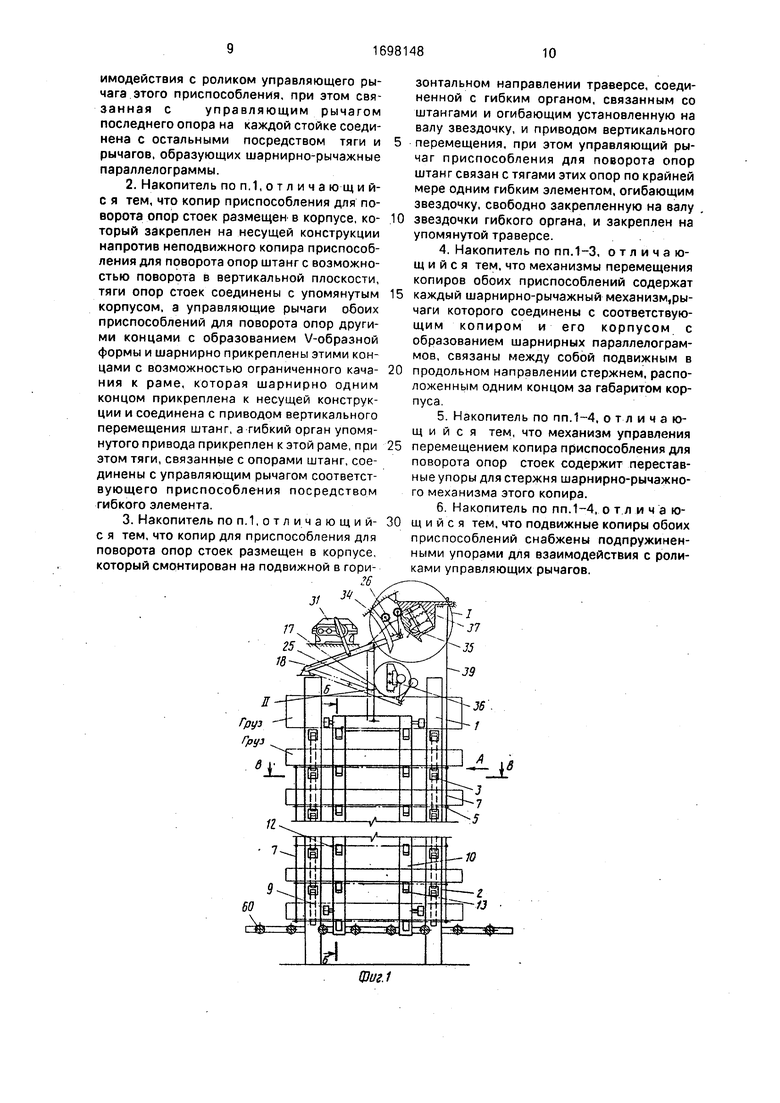
В ряде случаев, когда требуется, например, накопитель с большим ходом штанг, а места над накопителем мало, или,накопитель состоит из двух шахт, связанных между собой и отстоящих одна от другой на расстоянии, делающем невозможным устройство качающейся рамы для привода подвижных штанг обеих шахт, качающаяся рама может быть заменена звездочками.
Для этого (фиг. 12 и 13) на валу 61 закреплены жестко звездочки 62. через которые перекинуты тяговые цепи 63, связывающие траверсу 64 привода с балкой 11 рамы штанг 10. На валу 61 свободно сидят также звездочки 65, каждая из которых связывает цепью 66 двуплечий рычаг 67, шарнирно закрепленный на траверсе 64 и имеющий ролик 68 на другом плече, выполненный с возможностью взаимодействия с копиром 69, который закреплен неподвижно на раме шахты накопителя, и тягу 16, управляющую поворотом дополнительных опор 13.
На траверсе привода закреплен также корпус 70 управляемого копира 35, выполненного с возможностью взаимодействия с двуплечим рычагом 71, закрепленным на раме шахты и связанным с тягой 7, управляющей поворотом основных опор 3.
Накопитель по этому варианту работает аналогично накопителю по основному варианту.
Недостатком этого варианта является возможность более быстрого рассогласования работы основных и дополнительных опор вследствие износа шарниров, прежде всего в цепях, и опускания штанг 10 вниз, а также поворота основных опор, вызванного
опусканием при износе шарниров тяг 7.
Применение вместо цепей гибких элементов, не вытягивающихся в процессе эксплуатации, например стальных лент, сделало бы этот вариант наиболее предпочтительным.
Возможны также различные варианты механизмов управления управляемыми копирами. Например, копиры можно сдвигать в сторону с помощью кулачка или отдельного привода (электромагнита, пневмоцилин- дра, упора и т.д.), чтобы он не взаимодействовал с роликом V-образного рычага.
Формула изобретения
1. Вертикальный накопитель для штучных грузов, содержащий по крайней мере одну шахту, образованную стойками, на которых одна над другой закреплены с возможностью поворота вокруг горизонтальных осей опоры для удержания грузов, приспособление для поворота упомянутых опор, включающее в себя копир и связанный с одной из этих опор управляющий рычаг с роликом на свободном конце для контактирования с этим копиром, подвижным в вертикальном направлении от привода, и связанные с последним гибким органом штанги, на которых закреплены с
возможностью поворота вокруг горизонтальных осей и одна над другой опоры для подхвата и вертикального перемещения грузов, и приспособление для поворота опор штанг, включающее в себя неподвижный копир, размещенный в верхней части шахты, и управляющий рычаг с роликом на свободном конце для контактирования с неподвижным копиром,связанный с опорами каждой штанги посредством тяги, соединенной с ними рычагами с образованием шарнирно-рычажных параллелограммов, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения двустороннего вертикального перемещения грузов, приспособление для поворота опор штанг снабжено подвижным копиром, установленным с возможностью управляемого перемещения в нерабочее положение и
взаимодействия с роликом управляющего рычага этого приспособления при вертикальном перемещении штанг, копир приспособления для поворота опор стоек также установлен с возможностью управляемого перемещения в нерабочее положение и вэаимодействия с роликом управляющего рычага этого приспособления, при этом связанная с управляющим рычагом последнего опора на каждой стойке соединена с остальными посредством тяги и рычагов, образующих шэрнирно-рычажные параллелограммы.
2.Накопитель поп.1,отличающий- с я тем, что копир приспособления для поворота опор стоек размещен в корпусе, который закреплен на несущей конструкции напротив неподвижного копира приспособления для поворота опор штанг с возможностью поворота в вертикальной плоскости, тяги опор стоек соединены с упомянутым корпусом, а управляющие рычаги обоих приспособлений для поворота опор другими концами с образованием V-образной формы и шарнирно прикреплены этими концами с возможностью ограниченного качания к раме, которая шарнирно одним концом прикреплена к несущей конструкции и соединена с приводом вертикального перемещения штанг, а гибкий орган упомянутого привода прикреплен к этой раме, при этом тяги, связанные с опорами штанг, соединены с управляющим рычагом соответствующего приспособления посредством гибкого элемента.
3.Накопитель по п. 1,отличающий- с я тем, что копир для приспособления для поворота опор стоек размещен в корпусе, который смонтирован на подвижной в гори2634
J/
/7
зонтальном направлении траверсе, соединенной с гибким органом, связанным со штангами и огибающим установленную на валу звездочку, и приводом вертикального
перемещения, при этом управляющий рычаг приспособления для поворота опор штанг связан с тягами этих опор по крайней мере одним гибким элементом, огибающим звездочку, свободно закрепленную на валу
звездочки гибкого органа, и закреплен на упомянутой траверсе.
4.Накопитель по пп.1-3, отличающийся тем, что механизмы перемещения копиров обоих приспособлений содержат
каждый шарнирно-рычажный механизм,ры- чаги которого соединены с соответствующим копиром и его корпусом с образованием шарнирных параллелограммов, связаны между собой подвижным в
продольном направлении стержнем, расположенным одним концом за габаритом корпуса
5.Накопитель по пп.1-4, отличающийся тем, что механизм управления
перемещением копира приспособления для поворота опор стоек содержит переставные упоры для стержня шарнирно-рычажно- го механизма этого копира.
6.Накопитель по пп.1-4, отличаю- щ и и с я тем, что подвижные копиры обоих
приспособлений снабжены подпружиненными упорами для взаимодействия с роликами управляющих рычагов.
w/
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Вертикальный накопитель для штучных грузов | 1983 |
|
SU1194788A1 |
| Шаговый конвейер | 1986 |
|
SU1411241A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| Устройство для подачи грузов в проемы зданий | 1985 |
|
SU1361105A1 |
| Устройство для загрузки подвесок подвесного конвейера | 1987 |
|
SU1507695A1 |
| Транспортное средство для перевозки длинномерных грузов | 1985 |
|
SU1299859A1 |
| Автоматическая поточная линия для изготовления книг | 1986 |
|
SU1426848A1 |
| Машина для штабелевки свежеотформованных керамических и силикатных изделий, принимаемых от прессов | 1959 |
|
SU126044A1 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1986 |
|
SU1411192A1 |

Изобретение относится к устройствам складирования грузов. Цель.изобретения - расширение технологических возможностей путем обеспечения двустороннего вертикального перемещения. Накопитель имеет шахту, образованную неподвижными стойками 1 и подъемно-опускными от привода штангами 10. Штанги 10 снабжены поворотными вокруг .горизонтальных осей управляемыми опорами 13 для подхвата, удержания и перемещения грузов по вертикали. Шахта накопителя имеет управляемые копирами подъема-опускания опоры стоек 1, которые соединены между собой системой тяг и рычагов, образующих шарнирные параллелограммы, выполненные с возможностью взаимодействия с копирами при подходе штанг в верхнее положение и уп-. равляемые копирами подъема-опускания опор штанг 10, которые через систему тяг и рычагов взаимодействуют с опорами штанг при их подходе к нижнему положению, поднимая или опуская их. Копиры управляются передвижными упорами и входят в состав двухпараллелограммного механизма с общими шарнирами и фиксацией в крайних положениях. 5 з.п.ф-лы, 13 ил. Ј
сгпш
9-S
1 гпф
№8
8 18691
Уг
Sb
8И8691.
8
Фиг. 70
46
Пн
(Риг. 9
Фиг//
8И8691
Г-Г
63 57 58
65
62
Фиг. 13
| Вертикальный накопитель для штучных грузов | 1983 |
|
SU1194788A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
