Изобретение относится к области машиностроения и касается узлов стопорения и фиксации подвижных органов различных технологических станков и агрегатов.
Известно устройство для стопорения 5 подвижного органа относительно неподвижного, содержащее подпружиненный ог- . раничитель на неподвижном органе и упор, предназначенный для установки на подвижном органе, причем ограничитель и упор 10 имеют затылок и скос и установлены с возможностью взаимодействия затылками и скосами.
Однако данное устройство недостаточно надежно и характеризуется .значитель- 15 ной энергоемкостью.
Наиболее близким по технической сущности к предлагаемому является устройство . для стопорения подвижного органа, содер- Ъкащееупор, закрепленный на одном из сто- 20 порящихся элементов, и два шарнирно соединенных со штоком привода и подпружиненных стопора, каждый из которых выполнен со скосами с углом самоторможения с одной стороны и углом несамоторможе- 25 ния с другой, размещенные в корпусе, основание которого закреплено на другом из стопорящихся элементов, причем скосы упора расположены симметрично относительно его оси, а оба стопора снабжены 30 приводами расстопорения.
К недостаткам известного устройства относятся невысокая надежность из-за самозаклинивания при пережиме упором одного из стопоров, а также связанная с этим 35 повышенная энергоемкость привода перемещения стопоров.
Цель изобретения - повышение надежности устройства путем устранения само- заклинивания и уменьшения энергоемкости 40 привода за счет уменьшения усилия расстопорения.
Указанная цель достигается тем., что устройство для стопорения подвижного узла относительно неподвижного содержит 45 упор, предназначенный для закрепления на одном из узлов, два подпружиненных ограничителя со скосами, связанные с приводом перемещения и размещенные в корпусе, предназначенном для закрепле- 50 ния на другом узле, причем один из скосов каждого ограничителя выполнен под углом самоторможения. Устройство снабжено основанием, предназначенным для закрепления на узле, несущем ограничи- 55 тели, связанным с приводом стержнем и фиксирующими роликами, установленными на упомянутом стержне с возможностью взаимодействия со скосами, выполненными на основании. Ограничители шарнирно связаны со стержнем и между собой, а корпус установлен на основании с возможностью поворота вокруг введенной в устройство оси.
При этом расстояние от оси поворота корпуса до скосов ограничителей, выполненных под углом самоторможения, меньше, чем расстояние до скосов основания.
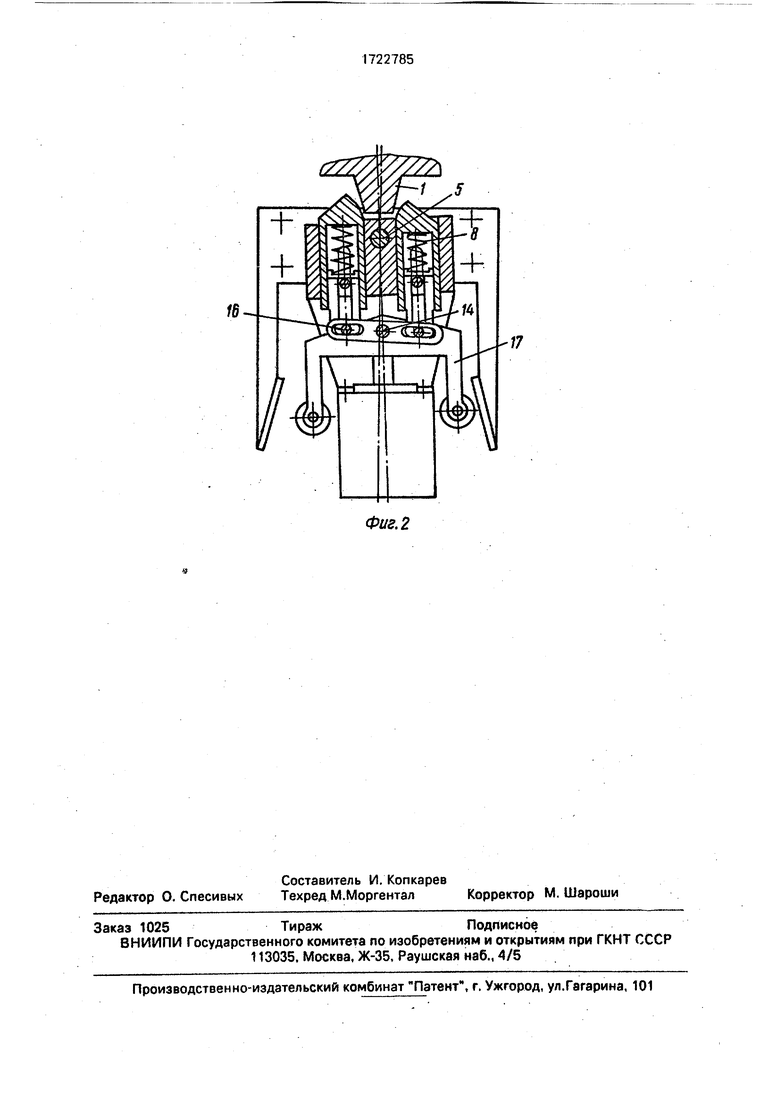
На фиг. 1 изображено устройство для стопорения в положении, соответствующем зафиксированному подвижному узлу; на фиг. 2 - то же, в начальной стадии расфик- сации.
Устройство содержит упор 1, закрепленный на подвижном узле, например руке манипулятора, с возможностью взаимодействия с парой ограничителей 2 и 3, размещенных в корпусе 4, установленном с возможностью поворота вокруг оси 5 основания 6, которое смонтировано на неподвижном узле (не показано) и снабжено скосами 7. Каждый из ограничителей 2 и 3 поджат в сторону упора 1 пружиной 8, опирающейся на тарелку 9. которая установлена на пальце 10, вставленном в корпус 4 и проходящем через продольный паз 11 ограничителя. Привод 12 закреплен на корпусе 4 и штоком 13 с шарнирно смонтированным на последнем посредством оси 14 коромыслом 15 шарнирно соединен с ограничителями 2 и 3 с помощью осей 16, установленных в пазах 1Т ограничителей 2 и 3. На штоке 13 жестко закреплен стержень 17 с роликами 18, установленными с возможностью взаимодействия со скосами 7 основания 6.
Ограничители 2 и 3 на рабочем конце снабжены скосами, причем скосы, обращенные к оси устройства, выполнены под углом самоторможения, а противоположные скосы выполнены под углом несамоторможения.
Ось 5, ограничители 2 и 3, ролики 18 и скосы 7 взаимно расположены таким образом, что выполняется условие:
,
где L - расстояние от оси 5 до точки взаимодействия ролика 18 и скоса 7, измеренное вдоль оси устройства;
I - расстояние от оси 5 до точки взаимодействия скоса, выполненного под углом самоторможения ограничителя 2 или 3 с упором 1, измеренное вдоль той же оси.
Устройство работает следующим образом.
В исходном положении шток 13 привода 12 выдвинут и ролики 18 поджаты к скосам 7, надежно фиксируя корпус 4 и ограничителями 2 и 3 от поворота на основании 6. Ограничители 2 и 3 находятся под
действием пружин 8 в крайнем выдвинутом положении из корпуса 4.
Упор 1, надвигаясь справа или слева, вступает в контакт со скосом, выполненным под углом несамоторможения, соответст- венно ограничителя 3 или 2 и, преодолевая усилие пружины 8, утапливает соответствующий ограничитель в корпусе 4. Затем (например, при подходе справа), продолжая движение, упор 1 поджимается к ско- су ограничителя 2, выполненному под углом самоторможения, и дальнейшее перемещение подвижного узла прекращается. При этом ограничитель 3 под действием пружины 8 возвращается в выдвинутое положение, поджимаясь к упору скосом, выполненным под углом самоторможения. Таким образом подвижный узел оказывается застопоренным в заданном положении посредством фиксации упора 1 между ограничителями 2 и 3. В процессе перемещений ограничитель 3 пазом 1.1 скользит по оси 16 неподвижного коромысла 15.
Для расстопорения упора 1 шток 13 приводом 12 перемещается вниз, через коромысло 15 и оси 16 воздействуя на ограничители 2 и 3. При этом вследствие пережима упором 1 ограничителя 2 первым начина- ет перемещение вниз ограничитель 3, и коромысло 15 поворачивается вокруг неподвижной оси 16 ограничителя 2. Одновременно с этим стержень 17, перемещаясь со штоком 13 вниз, выводит ролики 18 из контакта со скосами 7, давая возможность для свободного проворота корпуса 4 на оси 5 относительно основания 6. За счет этого силовой пережим упора 1 к ограничителю 2 прекращается, и последний вслед за ограничителем 3 утапливается .приводом 12 в корпусе 4, что сопровождается деформацией пружин 8. Упор 1 высвобождается и подвижный узел получает возможность для дальнейшего перемещения.
Пальцы 10, располагаясь в па.зах 11, препятствуют провороту ограничителей 2 и 3 в корпусе 4.
Для ограничения поворота корпуса 4 нз основании 6 он подпружинен к среднему положению (не показано). За счет указанного соотношения L и I вывод роликов 18 из контакта со скосами 7 производится с незначительными энергозатратами, что в совокупности с указанными особенностями соединения корпуса 4 с основанием 6 позволяет использовать в устройстве привод малой мощности.
Ф о р м ула изобретения
1.Устройство для стопорения подвижного узла относительно неподвижного, содержащее упор, предназначенный для закрепления на одном из узлов, два подпружиненных ограничителя со скосами, связанные с приводом перемещения и раз- мощенные в корпусе, предназначенном для закрепления на другом узле, причем один из скосов каждого ограничителя выполнен под углом самоторможения, отличающееся тем, что, с целью повышения надежности устройства путем устранения самозаклинивания и уменьшения энергоемкости привода за счет уменьшения усилия расстопорения, устройство снабжено основанием, предназначенным для закрепления на узле.несущем ограничители, связанным с приводом стержнем и фиксирующими роликами, установленными на упомянутом стержне с возможностью взаимодействия со скосами, выполненными на основании, при этом ограничители шарнирно связаны со стержнем и между собой, а корпус установлен на основании с возможностью поворота вокруг введенной.в устройство оси.
2.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что расстояние от оси поворота корпуса до скосов ограничителей, выполненных под углом самоторможения, меньше, чем расстояние до скосов основания.
(22Z%Z&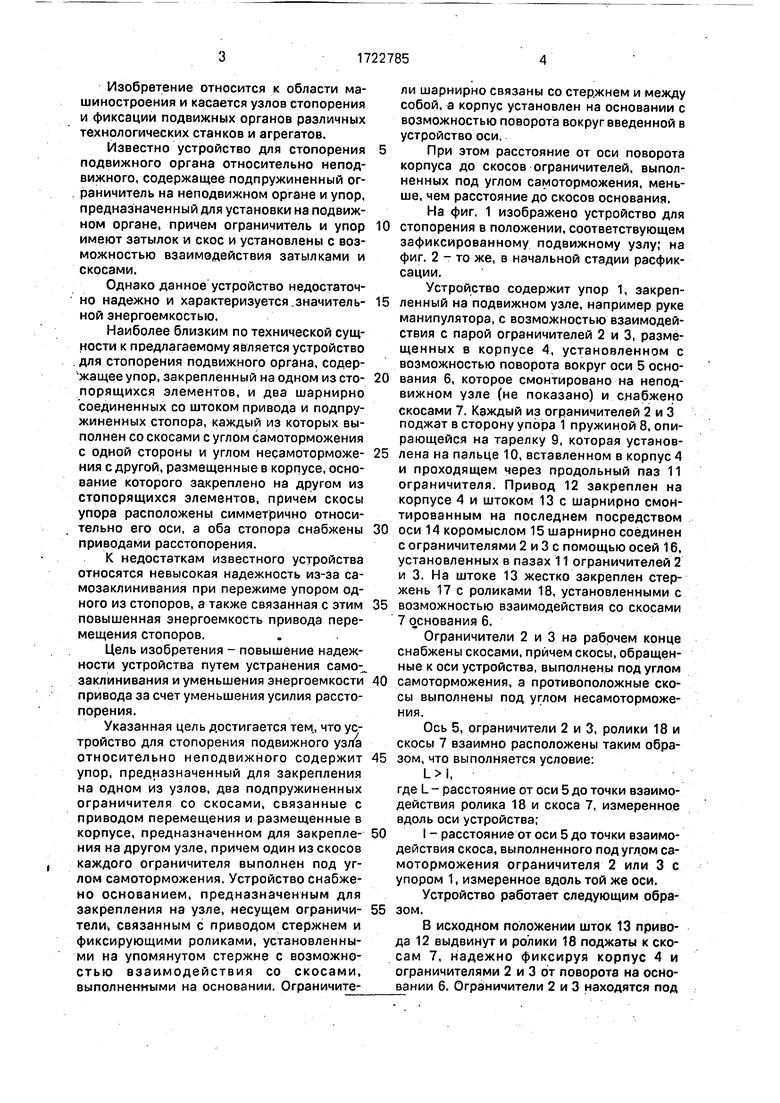
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стопорения подвижного органа | 1972 |
|
SU536932A1 |
| Устройство для стопорения подвижного органа | 1986 |
|
SU1425045A1 |
| Устройство стопорения подвижного органа относительно неподвижного | 1990 |
|
SU1712684A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Механизм центрирования цилиндрических деталей | 1986 |
|
SU1465231A1 |
| Машина для откачки трубчатых газоразрядных ламп | 1974 |
|
SU528634A1 |
| СТАНОК ДЛЯ НАПРАВЛЕННОГО РАСКОЛА ГОРНЫХ ПОРОД | 1991 |
|
RU2011819C1 |
| Штамп для резки профильного проката под углом | 1984 |
|
SU1247256A1 |
| РУЧНОЙ ГИДРАВЛИЧЕСКИЙ РЕЗАК | 1997 |
|
RU2121433C1 |
| ТУРНИКЕТ | 2009 |
|
RU2387782C1 |
Изобретение относится к машиностроению, и касается стопорения подвижных органов относительно неподвижных. Цель - повышение надежности при устранении самозаклинивания и уменьшение энергоемкости привода. Устройство содержит корпус 4 с подпружиненными ограничителями 2 и 3. При фиксации упор 1 подвижного узла утап- ливает один из ограничителей 2 или 3, упираясь при этом в другой. При остановке подвижного узла второй ограничитель поджимает упор. При расфиксации шток 13 привода отводит вниз ограничители 2 и 3, из которых первым начинает движение менее нагруженный из них, а корпус 4 имеет возможность поворота вокруг оси 5 за счет образовавшихся зазоров между роликами 18 стержня 17 и скосами 7 основания 6, ограничителями 2. 3 и упором 1, что облегчает вывод из контакта более нагруженного ограничителя. 1 з.п. ф-лы, 2 ил.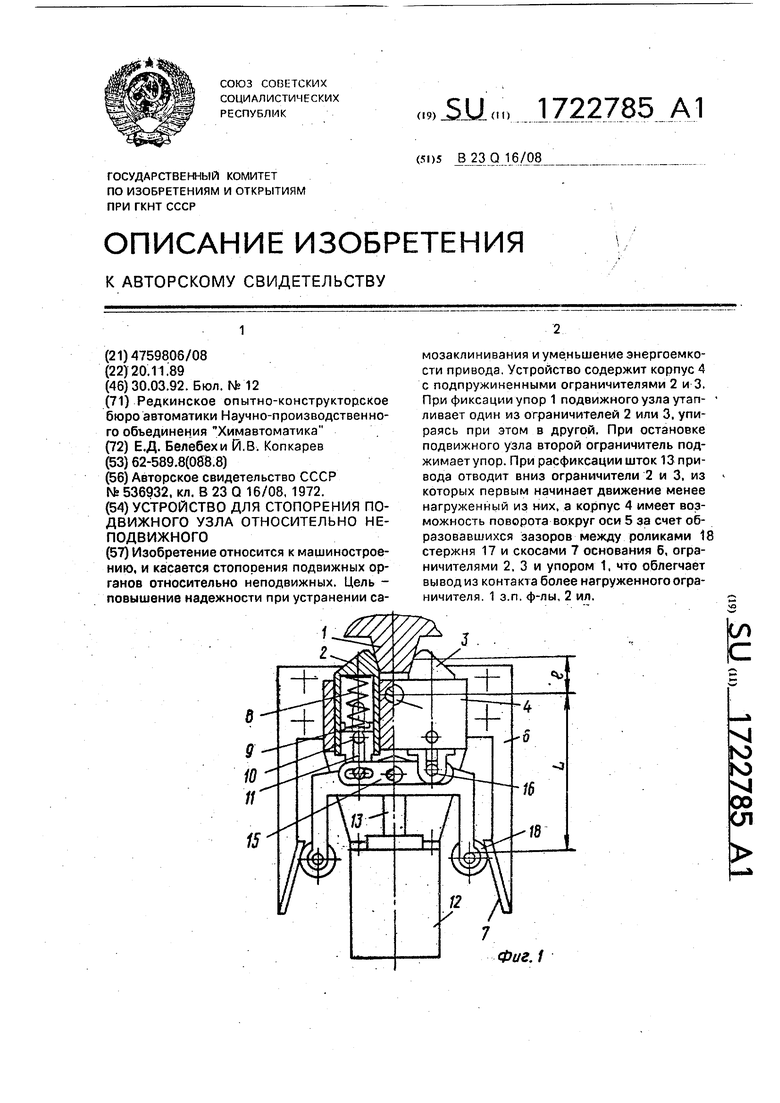
Фиг. 2
| Устройство для стопорения подвижного органа | 1972 |
|
SU536932A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
