Ю СП
о
20
Изобретение относится к робототехнике.
Целью изобретения является расширение технологических, возможностей утем обеспечения управляемых угловых перемещений рабочего органа
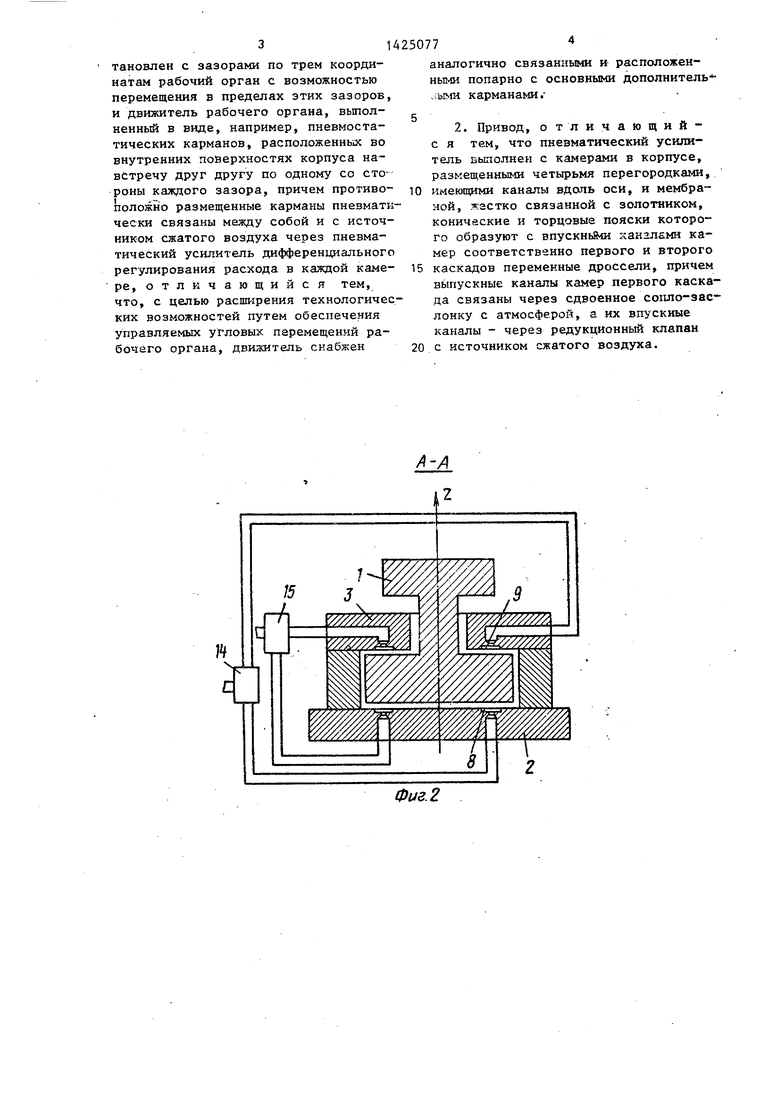
На фиг, 1 изображена конструктив- )ная схема, привода микроманипулятора;, 5на фиг о 2 - разрез А-А на фиг, 1; ka фиг. 3 - разрез Б-Б на фиг« 1; на тиГе 4 пневматический усилитель I Привод микроманипулятора содержит рабочий орган 1, который установлен fc за.зорами по трем координатам в корпусе, состоящем из основания 2,j крыш- 1КИ 3 и стенок 4-7 в которых вьтол- |нены попарно расположенные например пневмостатнческие карманы соответст-- |венно 8-13, образующие движитель. Каждая пара противоположно размеш,ен- ных карманов связана ме)вду собой через пневматические усилители дифференциального регулирования расхода в каждой камере Каждый пневматический усилитель состоит из сдвоен- 1ного сопла-заслонки 22 и корпуса 23, iG котором выполнены с помощью четы- jpex перегородок 24--27 и мембраны 28 |камеры первого 29-32 и второго 33 и |34 каскадов. Мембрана 28 жестко свя- Ьана с золотником 35, конические и торцовые пояски которого образуют в |осевых отверстиях соответственно 36, корпуса 37 и перегородок 24 и 25 пе- временные-дроссели 38-41. Впускные :каналы 42 к 43 камер 29 и 30 первого |Каск 1да связаны через редукционный клапан 44 с источником 45 сжатого воздуха, выпускные каналы 46 и 47 камер 31 и 32 первого каскада связаны через сдвоенное сопло-заслонку 22 с атмо- сферой Впускные каналы 43 и 49 камер 33 и 34 второго каскада связаны с источником 45 сжатого воздуха а
-J
выпускные каналы 50 и 51 - с соответ ствующими карманами движителя,
Привод микроканипулятора работает следующим образом.
При подаче управляющего сигнала на сопло-заслонку 22 заслонка изменяет свое исходное положение. например так, что проходное, сечение верхнего сопла уменьшается., а нижнего - увеличивается. Это задет к увеличению давления в камере 2-9 и уменьшению давления в камере 30, Разность давлений в камерах 29 и 30 приводит в движение мембрану 28 и золотник 35 вниз.
5
При этом проходное сечение дросселя 38 з меньшается, а проходное сечение дросселя 39 увеличивается, что приво- 5 дит к уменьшению давления в камере 29 и увеличению давления в камере 30, Сместившийся вниз золотник увеличивает проходное сечение дросселя 40 и уменьшает проходное сечение дросселя
0 41. Следовательно, увеличивается давление в камере 33 и уменьшается давление в камере 34, что приводит к увеличению расхода тела, поступающего через канал 50, например, в карма5 ны 10 (фиг. 1) и уменьшению расхода рабочего тела, поступающего через кансШ 51 в карманы 11. В случае, если сигналы, поступающие на устройства 22 этих карманов одинаковы, то
0 усилители 18 и 19 и движители стенок 4 и 5 работают аналогично. Отсюда нарушается равновесие сил, действующих на рабочий орган 1 по оси X, а он перемещается вправо. В результате движения зазор между рабочим органом 1 и стенкой 4 увеличивается, а между рабочим органом 1 и стенкой 5 уменьшается. В увеличивающемся зазоре давление уменьшается5 а в уменьшающемся
0 зазоре увеличивается. Движение происходит до тех пор., пока силы, дейст- вуютие на рабочий орган 1 по о.си X, не уравновесятся. При перемещении рабочего органа 1 по одной координа--5 те (например X) опоры 2 н 3,. 6 и 7 вьтолняют функции направляющих.
Для осуществления вращательного движения, например вокруг оси X, необходимо на усилители 16 и 17 подать
0 инверсные сигналы и для вращения по часовой стрелке в плоскости чертежа (фиг, 3). В верхний-правый карман 9- увеличить расход рабочего тела, а в нижний-правый 8 уменьшить и, наоборот, в верхний левьм карман уме.ньшить
5
расход, а в нижний-правый увеличить его. В результате равновесие момен- тов относительно оси X нарушается и рабочий орган 1 поворачивается.
Перемещение рабочего органа по любой Координате аналогично перемещению по оси Х, а йрардения вокруг остальньи; осей аналогичны вращению вокруг оси X. Перемещения и вращения по всем координатам могут осу1це;тв ляться одновременно. Формула изобретения
1. Привод микромаыипулятора, со- держашз1й корпус, внутри которого ус
тановлен с зазорами по трем координатам рабочий орган с возможностью перемещения в пределах этих зазоров, и движитель рабочего органа, вьшол- ненный в виде, например, пневмоста- тических карманов, расположенньис во внутренних поверхностях корпуса на встречу друг другу по одному со стороны каждого зазора, причем противо- положно размещенные карманы пневматически связаны между собой и с источником сжатого воздуха через пневматический усилитель дифференциального регулирования расхода в каждой каме- ре, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения управляемых угловых перемещений рабочего органа, движитель снабжен
гично связанными и- расположен- попарно с основными дополнитель карманами.2. Привод, отличающий- с я тем, что пневматический усилитель выполнен с камерами в корпусе, размещенными четырьмя перегородками, имеющими каналы вДоль оси, и мембраной, жзстко связанной с золотником, конические и торцовые пояски которого образуют с BnycKHbS oi каналами камер соответственно первого и второго каскадов переменные дроссели, причем выпускные каналы камер первого каскада связаны через сдвоенное сопло-зас лонку с атмосферой, а их впускные каналы - через редукцнонньй клапан с источником сжатого воздуха.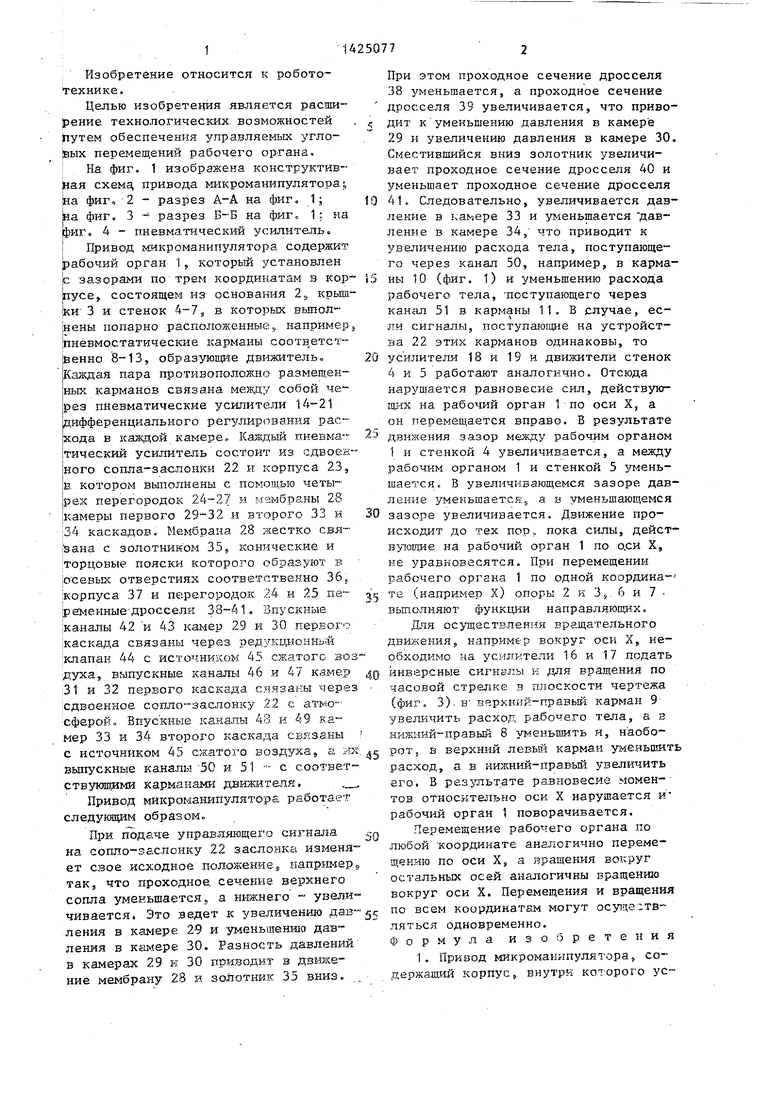
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2013 |
|
RU2553588C1 |
| Устройство для пневматической разгрузки направляющих | 1981 |
|
SU975306A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1971 |
|
SU308234A1 |
| Электрогидравлический усилитель | 1978 |
|
SU929893A1 |
| Электрогидравлический усилитель | 1975 |
|
SU569756A1 |
| Усилитель | 1981 |
|
SU1008711A1 |
| ПРИВОД МИКРОПЕРЕМЕЩЕНИЙ | 1972 |
|
SU340796A1 |
| СЕРВОКЛАПАН | 1994 |
|
RU2064608C1 |
| ПРИВОД ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ | 1970 |
|
SU280150A1 |
| Следящий привод | 1976 |
|
SU636423A1 |

Изобретение относится к робото-° технике. Целью изобретения является расширение технологических возможностей путем обеспечения управляемых угловых перемещений рабочего органа. Для этого привод микроманипулятора содержит корпус 2, внутри которого установлен с зазорами по трем координатам рабочий орган 1- с возможностью перемещения в пределах этих зазоров и движитель рабочего органа, выполненный в виде пневмостатических карманов 10-13, расположенных во внутренних поверхностях корпуса навстречу друг другу попарно со стороны каждого зазора. Противоположно размещенные карманы пневматически связаны между собой и с источником сжатого воздуха через пневматические усилители 18-21 дифференциального регулирования расхода в каждой камере. 1 з.п. ф-лы, 4 нл, с «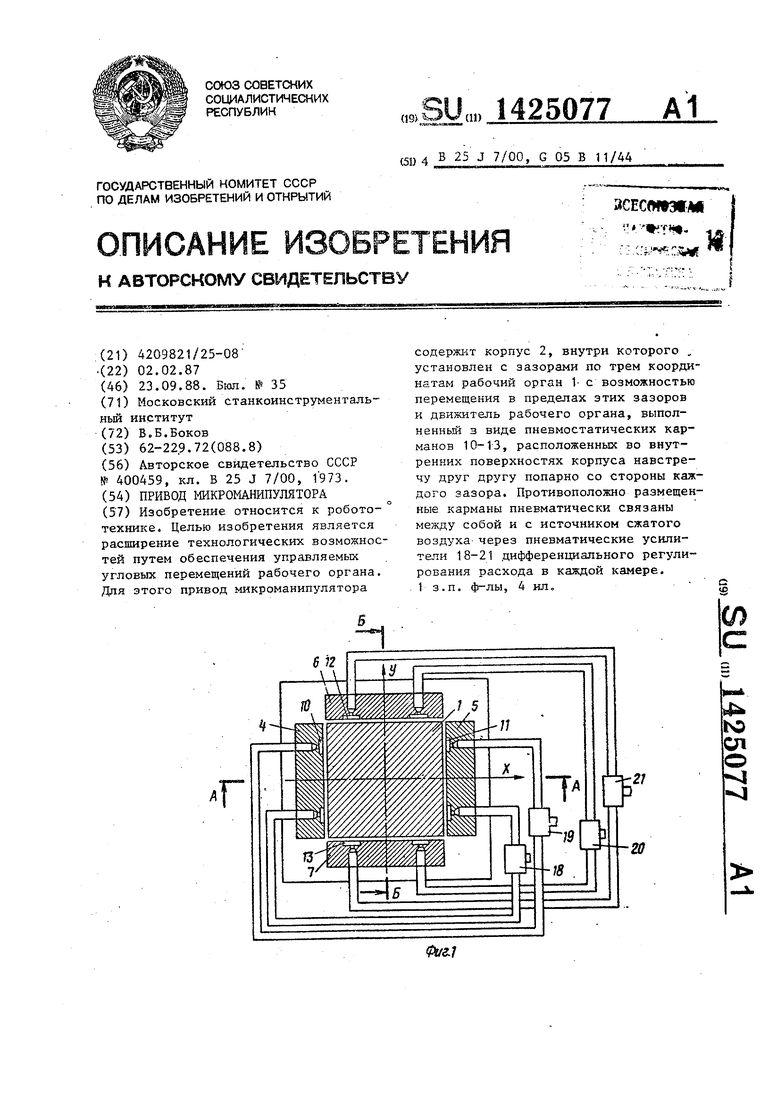
Фиг. 2
Ф1/&.3
. 5
i / к опоре опоре
| Л\ИКРОМАИИПУ.ПЯТОР | 0 |
|
SU400459A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
