(54) УСТРОЙСТВО ДЛЯ ПНЕВМАТИЧЕСКОЙ РАЗГРУЗКИ НАПРАВЛЯЮЩИХ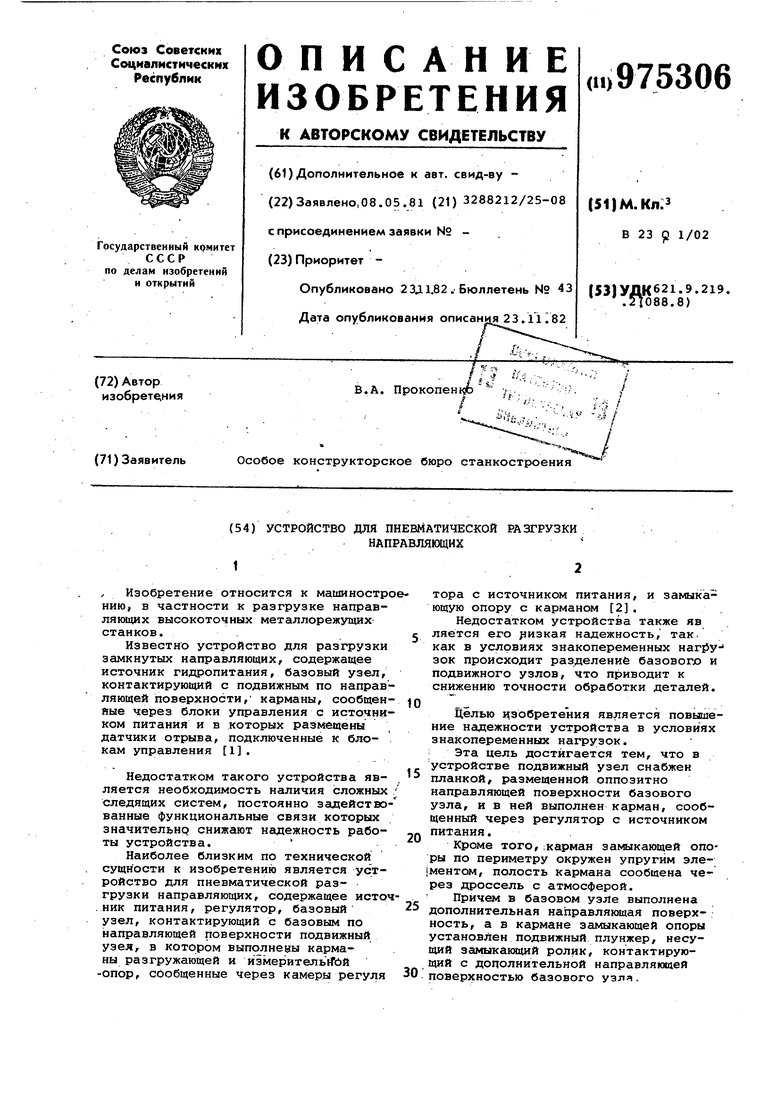
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидростатические направляющие | 1978 |
|
SU859698A2 |
| Гидростатические направляющие | 1979 |
|
SU804901A1 |
| Гидростатические направляющие | 1977 |
|
SU887823A1 |
| РЕГУЛЯТОР ДЛЯ ГИДРОСТАТИЧЕСКИХ ОПОР | 2011 |
|
RU2487280C1 |
| Гидростатические направляющие | 1975 |
|
SU643277A1 |
| Устройство автоматической разгрузки направляющих | 1980 |
|
SU991670A1 |
| Двусторонние гидростатические направляющие металлорежущего станка | 1978 |
|
SU747686A1 |
| Регулятор давления для замкнутой гидростатической опоры | 1979 |
|
SU1059555A1 |
| ГИДРАВЛИЧЕСКИИ РЕГУЛЯТОР | 1972 |
|
SU335675A1 |
| Металлорежущий станок | 1982 |
|
SU1118488A1 |
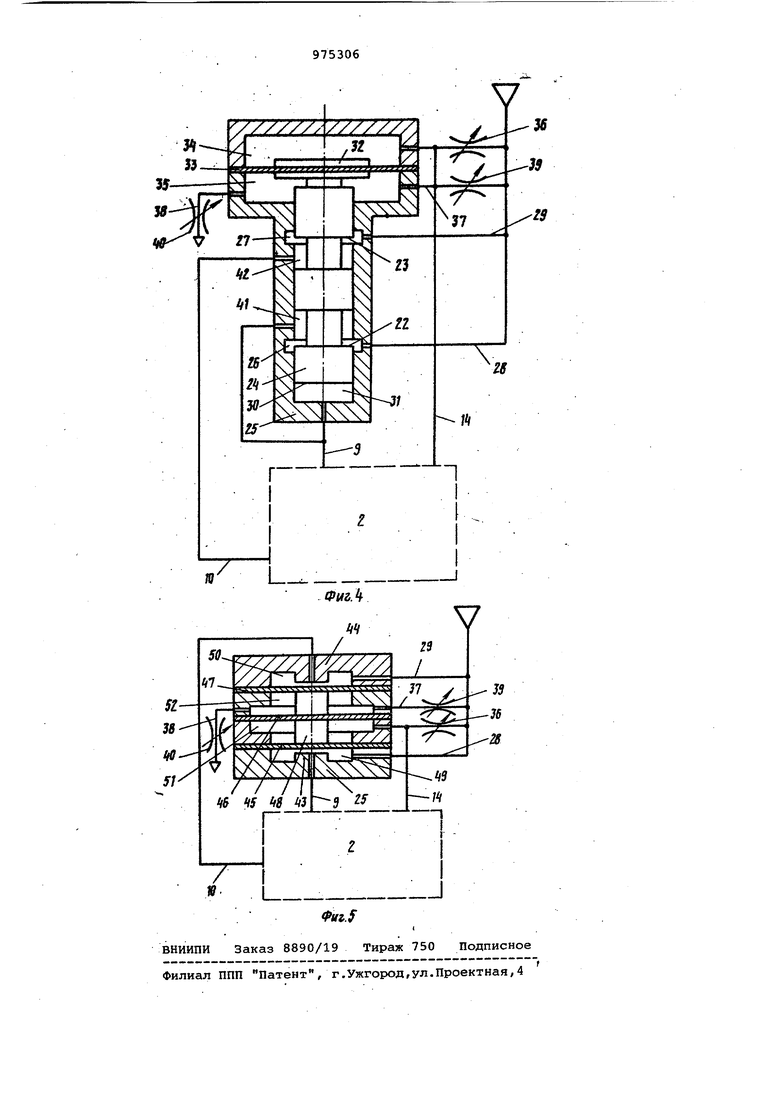
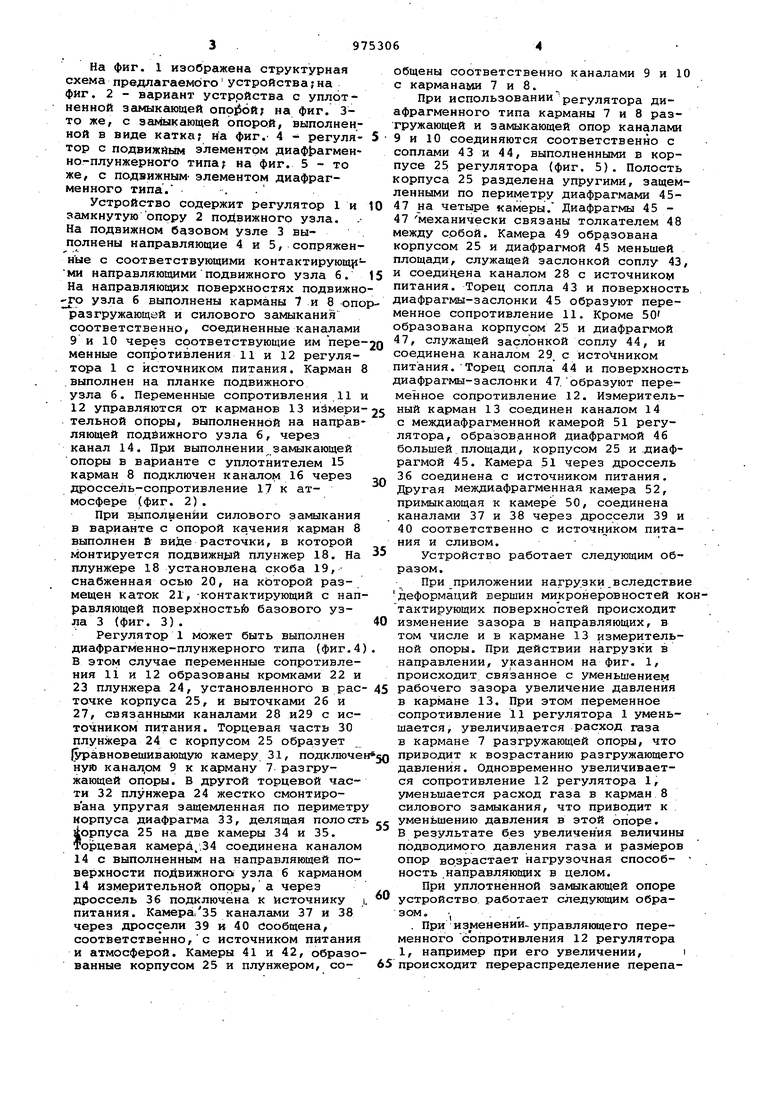
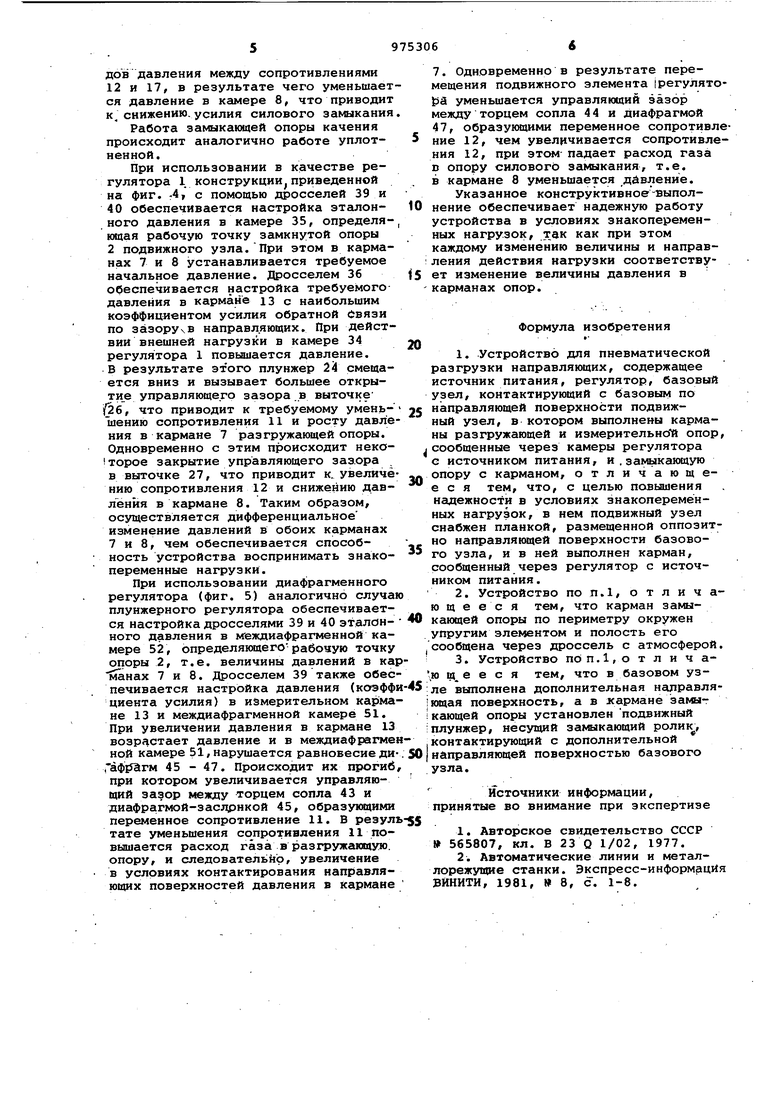
Изобретение относится к машиностр нию, в частности к разгрузке направляюцдах высокоточных металлорежущих станков. . Известно устройство для разгрузки замкнутых направляющих/ содержащее источник гидропитания, базовый узел, контактирующий с подвижным по направ ляющей поверхности, карманы, сообщен йые через блоки управления с источни ком питания и в которых размещены датчики отрыва, подключенные к блокам управления 1. Недостатком такого устройства является необходимость наличия сложных следящих систем, постоянно задейство ванные функциональные связи которых значительнр снижают надежность работы устройства. Наиболее близким по технической сущности к изобретению является устройство для пневматической раз- грузки направляющих, содержащее исто .ник питания, регулятор, базовый узел, контактирующий с базовым по направляющей поверхности подвижный узел, в котором выполнены карманы разгружающей и измерительйЬй -опор, сообщенные через камеры регуля тора с источником питания, и замыкающую опору с карманом 2. . Недостатком устройства также яв ляется его ризкая надежность, так. как в условиях знакопеременных зок происходит разделение базового и подвижного узлов, что приводит к снижению точности обработки деталей. Целью изобретения является повышение надежности устройства в условиях знакопеременных нагрузок. Эта цель достигается тем, что в устройстве подвижный узел снабжен планкой, размещенной оппозитно направляющей поверхности базового узла, и в ней выполнен карман, сообщенный через регулятор с источником питания. Кроме того, :карман замыкающей опоры по периметру окружен упругим элементом, полость кармана сообщена через дроссель с атмосферой. Причем в базовом узле выполнена дополнительная направляющая поверхность, а в кармане замыкающей опоры установлен подвижный плунжер, несущий замыкакиций ролик, контактирующий с дополнительной направляющей поверхностью базового узлч. На фиг. 1 изображена структурная схема предлагаемогоустройства,-на фиг. 2 - вариант устройства с уплотненной зб1мыкающей на фиг. 3то же, с замыкающей опорой, выполненной в виде каткг1; на фиг. 4 - регулятор с подвижным элементом диаф эагменно-плунжерного типа; на фиг. 5 - то же, с подвижным- элементом диафрагменного типа. . Устройство содержит регулятор 1 и замкнутую опору 2 подвижного узла. . На подвижном базовом узле 3 вы прлнены направляющие 4 и 5, сопряженные с соответствующими контактирующр ми направляющими подвижного узла 6. На направляющих поверхностях подвижно узла б выполнены карманы 7 и 8 опо разгружающей и силового замыкания соответственно, соединенные каналами 9 и 10 через соответствующие им переменные сопротивления 11 и 12 регуля. тора 1 с источником питания. Карман 8 .выполнен на планке подвижного узла б. Переменные сопротивления 11 и 12 управляются от карманов 13 иймерительной опоры, выполненной на направляющей подвижного узла 6, через канал 14. При выполнении замыкающей опоры в варианте с уплотнителем 15 карман 8 подключен каналом 16 через дроссель-сопротивление 17 к атмосфере (фиг. 2) . При выполнении силового замыкания в варианте с опорой качения карман 8 выполнен В виде расточки, в которой монтируется подвижный плунжер 18. На плунжере 18 установлена скоба 19, снабженная осью 20, на кЬторой размещен каток 21, -контактирующий с нап равляющей поверхность базового узла 3 (фиг. 3). Регулятор 1 может быть выполнен диафрагменно-плунжерного типа (фиг.4 В этом случае переменные сопротивления 11 и 12 образованы кромками 22 и 23 плунжера 24, установленного в рас точке корпуса 25, и выточками 26 и 27, связанными каналами 28 и29 с источником питания. Торцевая часть 30 плунжера 24 с корпусом 25 образует (уравновешивающую камеру 31, подключе ную каналом 9 к карману 7 разгружающей опоры. В другой торцевой части 32 плунжера 24 жестко смонтирована упругая защемленная по периметр корпуса диафрагма 33, делящая полост . «14 ОС ч .|Ч. гг . ч Л л wr ОЕГ корпуса 25 на две камеры 34 и 35. То|рцевая камера,34 соединена каналом 14 с выполненным на направляющей поверхности подвижного узла 6 карманом 14 измерительной опоры, а через дроссель 36 подключена к источнику питания. Камера/35 каналами 37 и 38 через дроссели 39 и 40 Сообщена, соответственно,с источником питания и атмосферой. Камеры 41 и 42, образованные корпусом 25 и плунжером, сообщены соответственно каналами 9 и 10 с карманами 7 и 8. При использовании регулятора диафрагменного типа карманы 7 и 8 разгружающей и замыкающей опор каналами 9 и 10 соединяются соответственно с соплами 43 и 44, выполненными в корпусе 25 регулятора (фиг. 5). Полость корпуса 25 разделена упругими, защемленными по периметру диафрагмами 4547 на четыре камеры. Диафрагмы 45 47 механически связаны толкателем 48 между собой. Камера 49 образована корпусом 25 и диафрагмой 45 меньшей площади, служащей заслонкой соплу 43, и соединена каналом 28 с источником питания. Торец сопла 43 и поверхность диафрагмы-заслонки 45 образуют переменное сопротивление 11. Кроме 50 образована корпусом 25 и диафрагмой служащей заслонкой соплу 44, и соединена каналом 29. с источником питания.Торец сопла 44 и поверхность диафрагмы-заслонки 47.образуют переменное сопротивление 12. Измерительный карман 13 соединен каналом 14 с междиафрагменной камерой 51 регулятора, образованной диафрагмой 46 большей.площади, корпусом 25 и диафрагмой 45. Камера 51 через дроссель 36 соединена с источником питания. Другая междиафрагменная камера 52, примыкающая к камере 50, соединена каналами 37 и 38 через дроссели 39 и 40 соответственно с источн 1ком питания и сливом. Устройство работает следующим образом. При приложении нагрузки вследствие деформаций вершин микронеровностей кон тактирующих поверхностей происходит изменение зазора в направляющих, в том числе и в кармане 13 измерительной опоры. При действии нагрузки в направлении, указанном на фиг. 1, происходи-т связанное с уменьшением рабочего зазора увеличение давления в кармане 13. При этом переменное сопротивление 11 регулятора 1 уменьшается, увеличивается расход газа в кармане 7 разгружающей опоры, что приводит к возрастанию разгружающего давления. Одновременно увеличивается сопротивление 12 регулятора 1, уменьшается расход газа в карман 8 силового замыкания, что приводит к уменьшению давления в этой опоре. п «гч ч|ч--гтттгт гп ч tT TTTXTT UUrCT D TtUTY В результате без увеличения величины подводимого давления газа и размеров опор возрастает нагрузочная способность направляющих в целом. При уплотненной замыкающей опоре устройство работает следующим образом. -, . , , . При изменении-управлякнцего переменного сопротивления 12 регулятора 1, например при его увеличении, i происходит перераспределение перепадов давления между сопротивлениями 12 и 17, в результате чего уменьшается давление в камере 8, что приводит к снижению, усилия силового замыкания
Работа замыкающей опоры качения происходит аналогично работе уплотненной.
При использовании в качестве регулятора 1 конструкции приведенной на фиг. Л с помощью дросселей 39 и 40 обеспечивается настройка эталонного давления в камере 35, определяющая рабочую точку замкнутой опоры 2 подвижного узла. При этом в карманах 7 и 8 устанавливается требуемое начальное давление. Дросселем 36 обеспечивается настройка требуемого давления в кармане 13 с наибольшим коэффициентом усилия обратной Связи по зазорухВ направляющих. При действии внешней нагрузки в камере 34 регулятора 1 повышается давление. В результате этого плунжер 24 смещается вниз и вызывает большее открыти е управляющего зазора .в выточке /26, что приводит к требуемому умень шению сопротивления 11 и росту давления в кармане 7 разгружающей опоры. Одновременно с этим происходит некоiTopoe закрытие управляющего зааора в выточке 27, что приводит к. увеличёнию сопротивления 12 и снижению давлёния в кармане 8. Таким образом, осуществляется дифференциальное изменение давлений в обоих карманах 7 и 8, чем обеспечивается способность устройства воспринимать знакопеременные нагрузки.
При использовании диафрагменного регулятора (фиг. 5) аналогично случаю плунжерного регулятора обеспечивается настройка дросселями 39 и 40 эталонного давления в междиафрагменной камере 52, определяющегорабочую точку опоры 2, т.е. величины давлений в кар манах 7 и 8. Дросселем 39 также обеспечивается настройка давления (коэффи циента усилия) в измерительном кармане 13 и междиафрагменной камере 51. При увеличении давления в кармане 13 возрастает давление и в междиафрагменной камере 51, нарушается равновесие диГафЕ5е1гм 45 - 47. Происходит их прогиб, при котором увеличивается управляющий зазор между торцем сопла 43 и диафрагмой-засдрнкой 45, образукхцими переменное сопротивление 11. В резуль тате уменьшения сопр отивления 11 повышается расход газа в разгружающую, опору, и следовательно, увеличение в условиях контактирования направляющих поверхностей давления в кармане
Указанное конструктивное-выполнение обеспечивает надежную работу устройства в условиях знакопеременных нагрузок, так как при этом каждому измеиению величины и направления действия нагрузки соответствует изменение величины давления в карманах опор.
Формула изобретения
с источником питания, и.замыкающую опору с карманом, отличающееся тем, что, с целью повышения надежности в условиях знакопеременных нагрузок, в нем подвижный узел снабжен планкой, размещенной оппозитно направляющей поверхности базового узла, и в ней выполнен карман, сообщенный через регулятор с источником питания.
Источники информации, принятые во внимание при экспертизе
