01/fj
Изобретение относитЪя к автоматическому регулирован1 йо и может бьп ь применено в системах, исйользующих в качестве исполнительных устройств электрические исполнительнйе механизмы постоянной скорости
Цель изобретения - повышение точности регулирования.
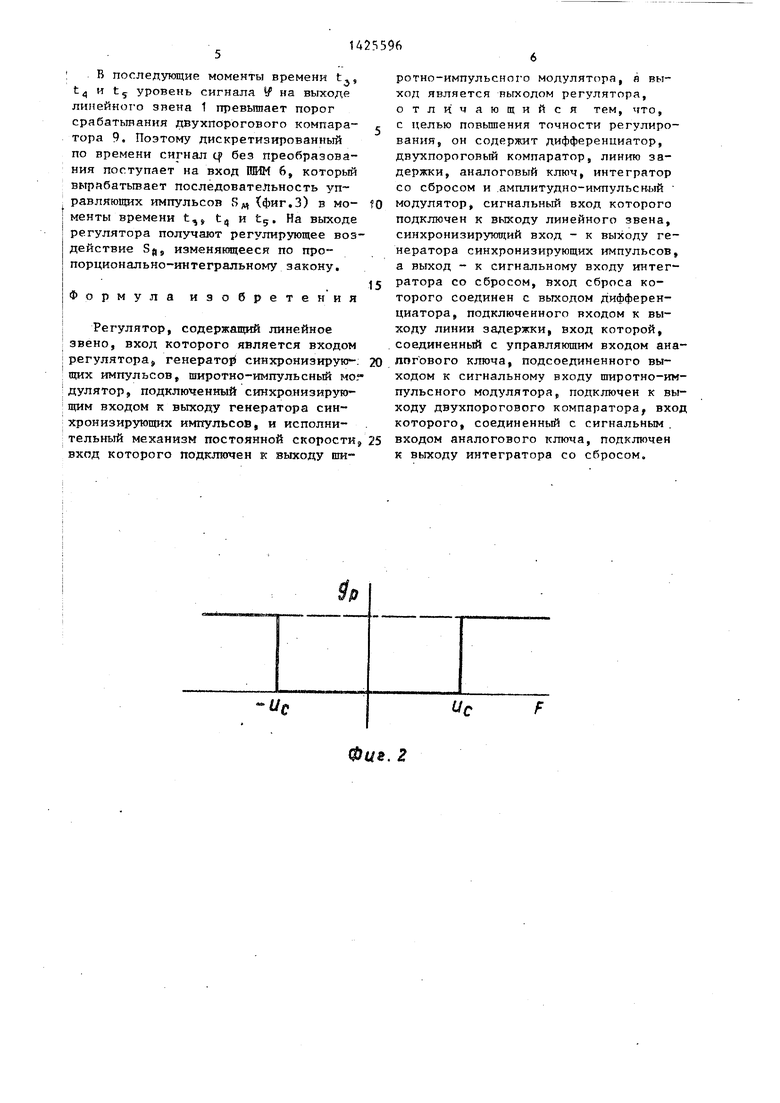
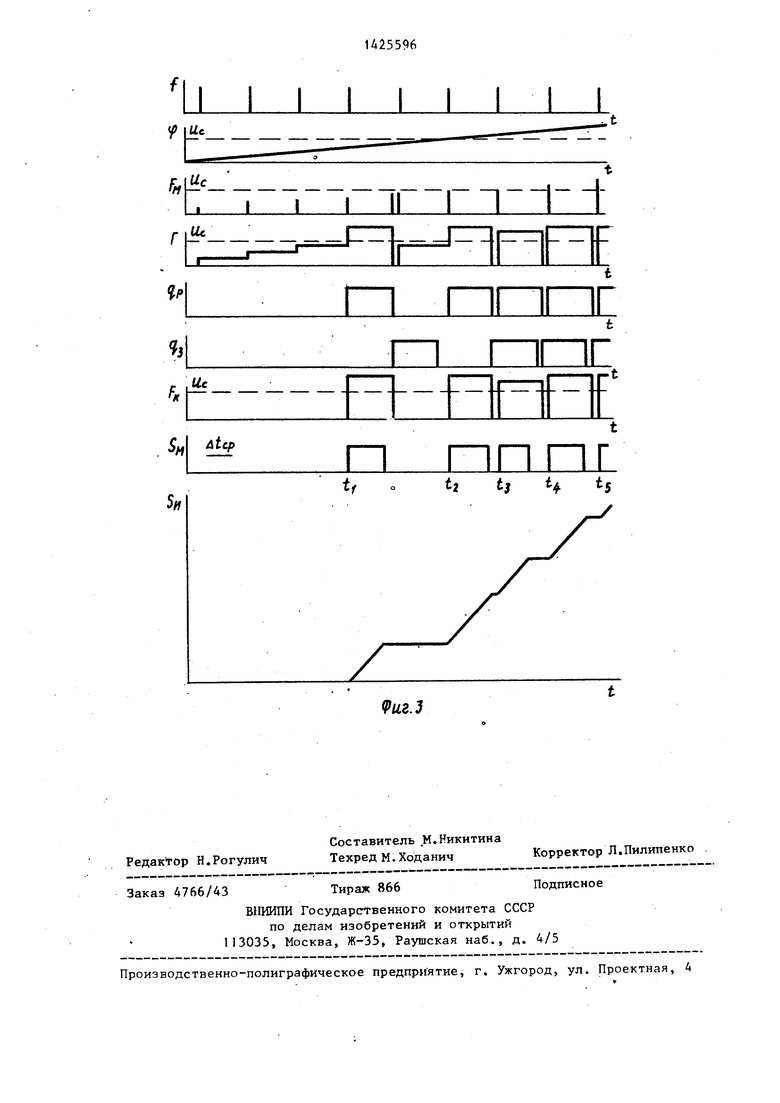
На фиг.1 представлена блок-схема ;регулятора; на фигв2 - статическая Ьсарактеристика двухпорогового компа- атора на фиг,3 - временные диаграммы, характериззпощие работу регу- пятора,.
Блок-схема регулятора (фиг,), рключает линейное звено 1, генератор 2 синхронизирующих импульсов, амп- Нитудно-импульсный модулятор (АИМ) 3
Интегратор 4 со сбросом, аналоговый люч 5, широтно-импульсный модулятор (ШЙМ) 65 исполнительный механизм 7, дифференциатор 8, двухпороговый компаратор 9 и линию 10 задержки,
Статическая характеристика двухпо рогового компаратора 9 () представляет собой зависимость выходного :игнала qi кпмпаратора от входного |:игнапа F(t).
I Регулятор работает следующим об- ,
Генератор 2 синхронизирующих импульсов вьфабатывает прямоугольные Импульсы с частотой и длительностью t . Эти импульсы синхронизируют работу АИМ 3 и ЮИМ 6.
Сигнал на выходе АИМ 3 формируется по алгоритму
г {..i.M при « О при tH-«- t t t«., ,
где ,j(t) - выходной сигнал АШ 3
в дискретные моменты вре-.
мени
Cf(t) - выходной сигнал линейного звена 1.
Интегратор 4 со сбросом имeet следующую характеристику;
F(t) « 1 |- ( F(t)dt при q; и,J I te -О при q , - и, ,
где F(t) - выходной сигнал интегратора J
t - момент времени последнего сброса интегратора;
o
5
0
II, - амплитуда сигнала сброса-, Тц - постоянная интегрирования.
Постоянная интегрирования интегратора со сбросом 4 устанавливается равной длительности синхронизирующих импульсов, т.е. Т, .
Это обеспечивает изменение напряжения на выходе интегратора 4 со сбросом за время импульса на величину амплитуды модулированного сигнала F(t).
Таким образом, АИМ 3 и интегратор 4 со сбросом, включенные последовательно, осзпцествляют алгебраическое суммирование значений сигнала tfCt,) в дискретные моменты времени t.
Сигнал с выхода интегратора со сбросом поступает на сигнальный вход аналогового ключа 5, работа которого определяется характеристикой
fFCt) при q р О при q
и, ;
О,
Где F(t) - сигнал на выходе аналогового ключа 5
F{t) - сигнал на выходе аналогового ключа 5} Чр - управляющий сигнал; 1/ -- амплитуда управляющего
сигнала.
Сигнал с выхода интегратора 4 со сбросом подается также на вход двухпорогового компаратора 9. Величина U является верхним порогом срабатывания, а величина П - нижним порогом срабатывания компаратора. Значение Uj. определяется по формуле
и.
f и tcp
где f
utep - «оке
- частота синхронизирующих импульсов I
время среза дополнительного механизма 7; максимальное значение сигнала на входе ШИМ 6, при котором он работает в линейном режиме.
Линия 10 задержки осуществляет задержку сигнала q. на время Г, , ко- определяется условием
,
где с - длительность синхронизирующих импульсов.
Алгоритм функционирования линии 10 задержки в операторной форме имеет вид
qj(p) е
-PC-J
Пр(р),
где
По(р)
Р ПЗ(Р)
10
сигнал на входе линии
задержки;
сигнал на выходе линии 1
задержки.
Выходной сигнал q линии 10 задерки поступает на дифференциатор 8, который вырабатьгеает импульс сброса q,, по переднему фронту сигнала q . Импульс, вырабатьгааемый-дифференциатором 8 по заднему фронту входного сигнала, не приводит к сбросу интег- ратора 4 со сбросом.
ШИМ 6 вырабатьшает прямоугольные импульсы S постоянной амплитуды, ... длительностью ut с периодом повторения Т. Период повторения определя- ется 1астотой синхронизирующих импульсов Т„ - . Полярность на
вьпсоде ШИМ 6 совпадает с полярностью сигнала на его входе. Длительность импульса л t линейно зависит от значения входного сигнала в соответствующие дискретные моменты времени t
&t
lF(t,)|
HJSiili. UMOIKC
где
FjtJ
сигнала на вхо в момент време- значение де ШИМ 6
ни tfc.
Исполнительный механизм 7, вход которого подключен к выходу ШИМ 6, имеет характеристику, близкую к характеристике интегрирующего звена при условии, что длительность входных импульсов it, поступающих с ШИМ 6 превьшает время среза & t, . Алгоритм работы исполнительного механизма 7 можно представить в операторной форме
S,(p)
при Л
при л t л t
ср
где Яц(р) - выходной сигнал исполнительного механизма 7j
0
ЭКЬ
10
0
жI 15 20
. 25
-J
35
- 40
45
50
55
)
Т
и
S ,„ - эквивалентная скорость перемещения вала исполнительного механизма 7 время одного оборота вала исполнительного механизма 7j
SM(P) - сигнал на входе исполнительного механизма 7. Выход исполнительного механизма 7 является выходом регулятора и посредством регулирующего органа воздействует на объект регулирования.
Для того, чтобы предлагаексый регулятор формировал, например, пропорционально-интегральный алгоритм управления, линейное звено должно иметь передаточную характеристику пропорционально-дифференциального звена:
tp(p) -(Р-Т -t- 1)- (р),
где (р) - сигнал рассогласования
в операторной форме; qiCp) - выходной сигнал линейного звена 1 в операторной форме.
В исходном .состоянии выходной сигнал интегратора 4 со сбросом равен нулю, аналоговый ключ 5 разомкнут. При малых рассогласованиях, когда cp(t) меньше , происходит накопление на выходе интегратора 4 со сбросом суммы дискретизированных значений cp(t), так как постоянная интегрирования равна длительности синхронизирующего импульса.
Когда в момент времени t (фйг,3) выходной сигнал F интегратора 4 со сбросом достигает верхнего порога срабатьгеания двухпорогового компаратора „9, с последнего поступает сигнал qp, замыкающий аналоговый ключ 5. Выходной сигнал интегратора 4 со сбросом через аналоговый ключ 5 поступает на ШИМ 6, который вырабатывает первый импульс S, про- порциональньй сумме мгновенных значений Ц , накопленной на интеграторе 4 со сбросом. Затем с задержкой, достаточной для срабатьгаания ШИМ 6, на дифференциатор В поступает сигнал q J.
В момент времени t (фиг,3) ШИМ 6 -вырабатьгеает второй импульс, пропорциональный сумме двух дискретов входного сигнала Cf ,
В
и
последующие
моменты времени t..
.(, и uj уровень сигнала У на выходе линейного звена 1 превьппает порог срабатьтания двухпорогового компаратора 9. Поэтому дискретизированный по времени сигнал q без преобразования поступает на вход ГОИМ 6, который вЕ.фабатьшает последовательность уп
ротно-импульсного модулятора, я выход является выходом регулятора, отличающийся тем, что, с целью повьшения точности регулирования, он содержит дифференциатор, двухпороговый компаратор, линию задержки, аналоговый ключ, интегратор со сбросом и .амплитудно-импульсными 
| название | год | авторы | номер документа |
|---|---|---|---|
| Время-импульсный универсальный интегрирующий преобразователь напряжения с функцией широтно-импульсной модуляции | 2020 |
|
RU2731601C1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| ШИРОТНО-ИМПУЛЬСНЫЙ МОДУЛЯТОР | 2000 |
|
RU2171011C1 |
| ПРОЦЕССОР СПЕКТРОМЕТРИЧЕСКИХ ИМПУЛЬСОВ | 1995 |
|
RU2092872C1 |
| Универсальный время-импульсный интегрирующий преобразователь напряжения с четырьмя функциями широтно-импульсной модуляции | 2023 |
|
RU2822374C1 |
| Импульсный стабилизатор напряжения | 1985 |
|
SU1372288A1 |
| Аналого-цифровой преобразователь | 2021 |
|
RU2760906C1 |
| Импульсный регулятор | 1981 |
|
SU1004969A1 |
| Способ импульсной стабилизации постоянного напряжения и устройство для его осуществления | 1982 |
|
SU1120304A1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
Изобретение относится к автоматическому регулированию и может быть применено в системах, использующих в качестве исполнительных устройств электрические исполнительные механизмы постоянной скорости, Цель изобретения - повышение точности регулирования. Регулятор содержит линейное звено 1, генератор 2 Ьинхро- низирутащих импульсов, амплитудно-импульсный модулятор 3, интегратор 4 со сбросом, аналоговый ключ 5, широт- но-импульсный модулятор 6, исполнительный механизм 7, дифференциатор 8, двухпороговый компаратор 9 и линию задержки 10. 3 ил. % (Л
равляющих импульсов Яд, (фиг,3) в мо- fO модулятор, сигнальный вход которого
менты времени t
э
м
t« и tc
На выходе
подключен к выходу линейного звена, синхронизирующий вход - к выходу генератора синхронизирующих импульсов, а выход - к сигнальному входу интегратора со сбросом, вход сброса которого соединен с выходом дифференциатора, подключенного входом к выходу линии задержки, вход которой, соединенный с управляющим входом ана логового ключа, подсоединенного выходом к сигнальному входу широтно-им пульсного модулятора, подключен к вы ходу двухпорогового компаратора, вхо которого, соединенный с сигнальным входом аналогового ключа, подключен к выходу интегратора со сбросом.
регулятора получают регулирующее воздействие Sfl, изменяющееся по про- порционально-интегральному закону.
Формула изобретения
Регулятор, содержащий линейное звено, вход которого является входом регулятора, генератор синхронизирую -; 20
ЩИХ импульсов, ШИРОТНО-ИМПУЛЬСНЫЙ MOf
дулятор, подключенный синхро.низирую- щим входом к выходу генератора синхронизирующих импульсов, и исполнительный механизм постоянной скорости, 25 вход которого подключен к выходу юи-Uc
подключен к выходу линейного звена, синхронизирующий вход - к выходу генератора синхронизирующих импульсов, а выход - к сигнальному входу интегратора со сбросом, вход сброса которого соединен с выходом дифференциатора, подключенного входом к выходу линии задержки, вход которой, соединенный с управляющим входом аналогового ключа, подсоединенного выходом к сигнальному входу широтно-им- пульсного модулятора, подключен к выходу двухпорогового компаратора, вход которого, соединенный с сигнальным входом аналогового ключа, подключен к выходу интегратора со сбросом.
Uc
Фц$. 2
I I I I I II I I
SH
&icf
nn nr
we.J
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Исследование и разработка математического и программного обеспечения АСУ ТП процесса стекловарения по Горшковой технологии: Отчет о НИР, инв | |||
| № 02850018063, ВНТИцентр | |||
| - Владимир, 1984, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
