Изобретение относится к электро технике, в частности к устройствам для определения углового положения ротора вентильного двигателя, и может быть использовано дпя синхро низации и управления преобразователями частоты, питающими вентильные двигатели, машины двойного питания, вентильные и машиновентильные каскады. Известно устройство для определения углового положения ротора вентильного двигателя, выполненное в виде индукционног дифференциаль ного датчика,.установленного на ва лу двигателя и подключенного к бло ку преобразований П. Недостатком известного устройст ва является то, что в нем не обеспечивается получение информации о текущем угловом положении ротора. В устройстве формируются лишь фиксированные углы и с невысокой точностью, что обусловлено наличием магнитных помех. Наиболее близким к изобретению по технической сущности является устройство для определения угловог положения ротора вентильного двигателя, содержащее обтюратор, установленный на валу двигателя, бло оптических преобразований, связанный с обтюратором, и блок электрическух преобразований на транзис торах, подключенный входами к выходам блока оптических преобразований, снабженного источником светового излучения и фотоприемником Принцип действия устройства основан на модуляции светового потока непрозрачным обтюратором, при этом на выходе устройства формируются прямоугольные сигналы, соответствующие фиксированным угловым положениям ротора. Однако известное устройство характеризуется невысокой точностью работы из-за невозможности получе.ния информации о текущем угловом положении ротора. Цель изобретения - повышение точности определения углового поло жения ротора вентильного двигателя путем получения информации о текущем, угловом положении ротора во вс диапазоне рабочих частот, включая нулевую. Указанная цель достигается тем, что в устройстве для определения углового положения ротора вентильного двигателя, содержащем обтюратор, установленный на валу двигателя, блок оптических преобразований, связанный с обтюратором, и блок электрических преобразований, подключенный входами к выходам блока оптических преобразований, обтюратор выполнен в виде диска с пятью кольцевыми дорожками, каждая из которых составлена из прозрачных и непрозра.чных для световых лучей участков, равномерно распределенных по окружности и чередующихся между собой, причем угловой размер прозрачных участков первой и второй от центра диска кольцевых дорожек составляет „ „ i6o -, , третьей и четвертой gp пятой - р- , центры прозрачных участков первой и второй кольцевых дорожек сдвинуты относительно друг друбйОга на угол уГ , второй и третьей 560°звона gp-, третьей и четвертой четвертой и пятой на ,. где р число пар полюсов вентильного двигателя, при этом блок оптических преобразований снабжен пятью оптоэлектронными парами, каждая из которых установлена против соответствующей кольцевой дорожки, первая оптоэлектронная пара, установленная против первой кольцевой дорожки, снабжена диафрагмой с угловым разЪмером /)(2р , а другие оптоэлектронные пары снабжены щелевыми диафрагмами, блок электрических преобразований снабжен линейным усилителем, четырьмя формирователями прямоугольных напряжений, сумматором и формирователем пилообразного напряжения, входы которого подключены к выходам линейного усилителя и первого формирователя прямоугольного напряжения, входы сумматора подключены к выходам формирователя пилообразного напряжейия и к выходам первого, второго и третьего формирователей прямоугольных напряжений, вход линейного усилителя и входы первого, второго, третьего и четвертого форюсрователей прямоугольных напряжений подключены соответственно к выходам первой, второй, третьей, четвертой и пятой оптоэлектронных пар, выходы сумматора и четвертого формирователя прямоугольного напряжения образуют соответственно основной и дополнительный выходы устройства для определения углового положения ротора вентильного двигателя.
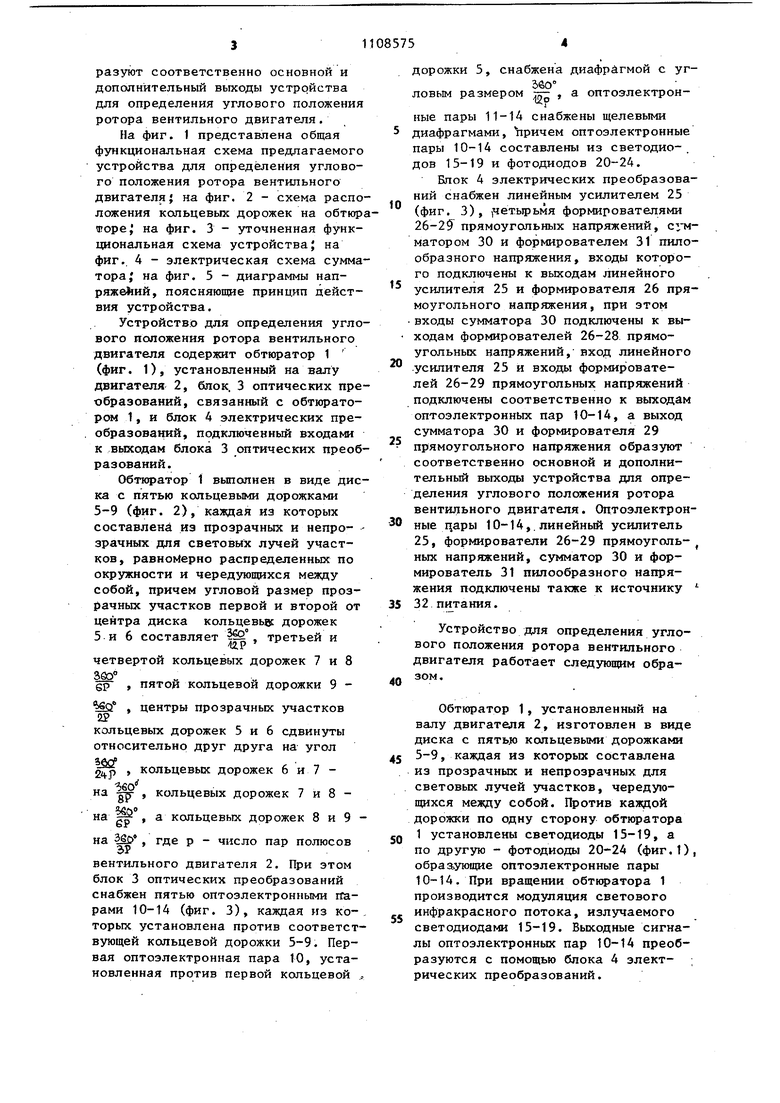
Fla фиг. 1 представлена общая функциональная схема предлагаемого устройства для определения углового положения ротора вентильного двигателя} на фиг. 2 - схема расположения кольцевых дорожек на обтюрашоре; на фиг. 3 - уточненная функциональная схема устройства; на фиг. 4 - электрическая схема сумматора; на фиг. 5 - диаграммы напряжеЪий, поясняющие принцип действия устройства.
Устройство для определения углового положения ротора вентильного двигателя содержит обтюратор 1 (фиг. 1), установленный на валу двигателя 2, блок. 3 оптических преобразований, связанный с обтюратором 1, и блок 4 электрических преобразований, подключенный входами к выходам блока 3 оптических преобразований.
Обтюратор 1 выполнен в виде диска с пятью кольцевыми дорожками 5-9 (фиг. 2), каждая из которых составлена из прозрачных и непро- зрачных для световых лучей участков, paBHOKtepHo распределенных по окружности и чередующихся между собой, причем угловой размер проз ачных участков первой и второй от центра диска кольцевь|у дорожек 5 и 6 составляет Ц, третьей и
четвертой кольцевых дорожек 7 и 8
3So°
Sp , пятой кольцевой дорожки 9 , центры прозрачных участков 22
кольцевых дорожек 5 и 6 сдвинуты относительно друг друга на угол
р , кольцевых дорожек 6 и 7 на , кольцевых дорожек 7 и 8 на , а кольцевых дорожек 8 и 9 на ° , где р - число пар полюсов
вентильного двигателя 2. При этом блок 3 оптических преобразований снабжен пятью оптоэлектронными парами 10-14 (фиг. 3), каждая из ко-, торых установлена против соответствующей кольцевой дорожки 5-9. Первая оптоэлектронная пара 10, установленная против первой кольцевой
дорожки 5, снабжена диафрагмой с уг5fiO°ловым размером г , а оптоэлектронxij
ные пары 11-14 снабжены щелевыми
диафрагмами, причем оптоэлектронные пары 10-14 составлены из светодио-. дон 15-19 и фотодиодов 20-24.
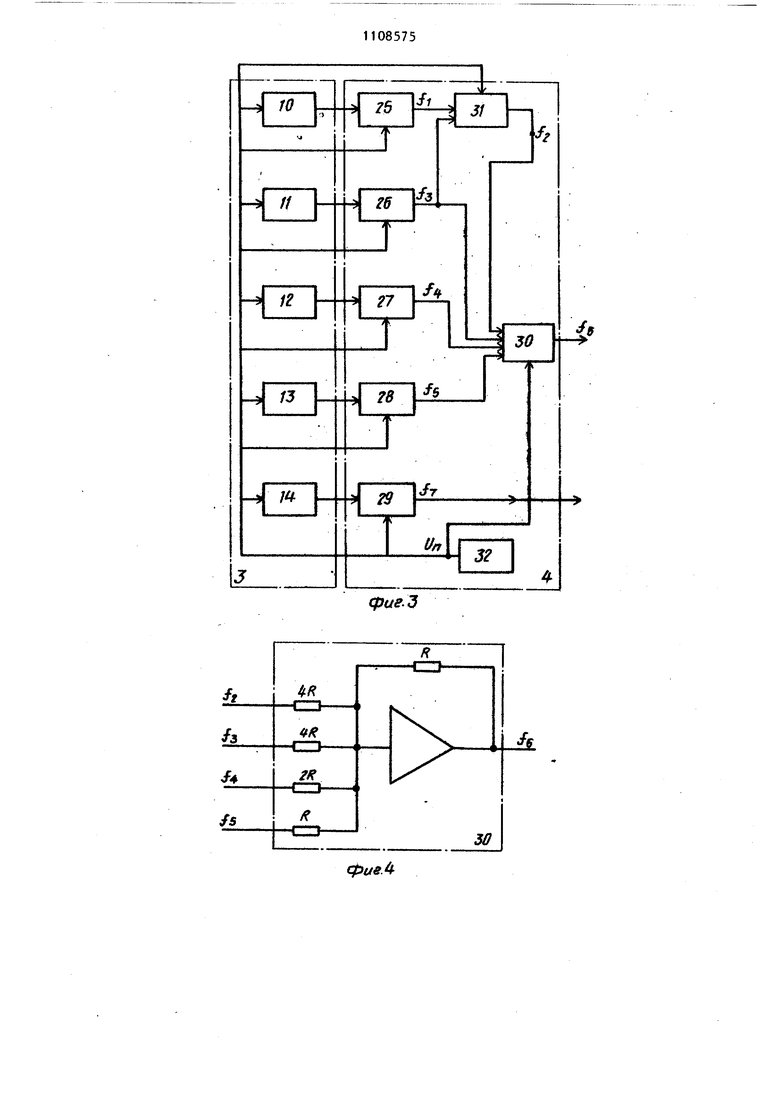
Блок 4 электрических преобразований снабжен линейным усилителем 25 (фиг. 3), (четырьмя формирователями 26-29 прямоугольных напряжений, с мматором 30 и формирователем 31 пилообразного напряжения, входы которого подключены к выходам линейного
усилителя 25 и формирователя 26 прямоугольного напряжения, при этом входы сумматора 30 подключены к вы ходам формирователей 26-28 прямоугольньк напряжений, вход линейного
усилителя 25 и входы формирователей 26-29 прямоугольных напряжений подключены соответственно к выходам оптоэлектронных пар 10-14, а выход сумматора 30 и формирователя 29 прямоугольного напряжения образуют соответственно основной и дополнительный выходы устройства для определения углового положения ротора вентильного двигателя. Оптоэлектрон0 ные дары 10-14,. линейный усилитель 25, формирователи 26-29 прямоугольных напряжений, сумматор 30 и формирователь 31 пилообразного напряжения подключены также к источнику
5 32 питания.
Устройство для определения углового положения ротора вентильного двигателя работает следующим обра0
Обтюратор 1, установленный на валу двигателя 2, изготовлен в виде диска с пять)о кольцевыми дорожками
5 5-9, каждая из которых составлена из прозрачных и непрозрачных для световых лучей участков, чередующихся между собой. Против каждой дорожки по одну сторону обтюратора
Q 1 установлены светодиоды 15-19, а по другую - фотодиоды 20-24 (фиг.1), обрааующие оптоэлектронные пары 10-14. При вращении обтнратора 1 производится модуляция светового . инфракрасного потока, излучаемого светодиодами 15-19. Выходные сигналы оптоэлектронных пар 10-14 преобразуются с помощью блока 4 электрических преобразований.
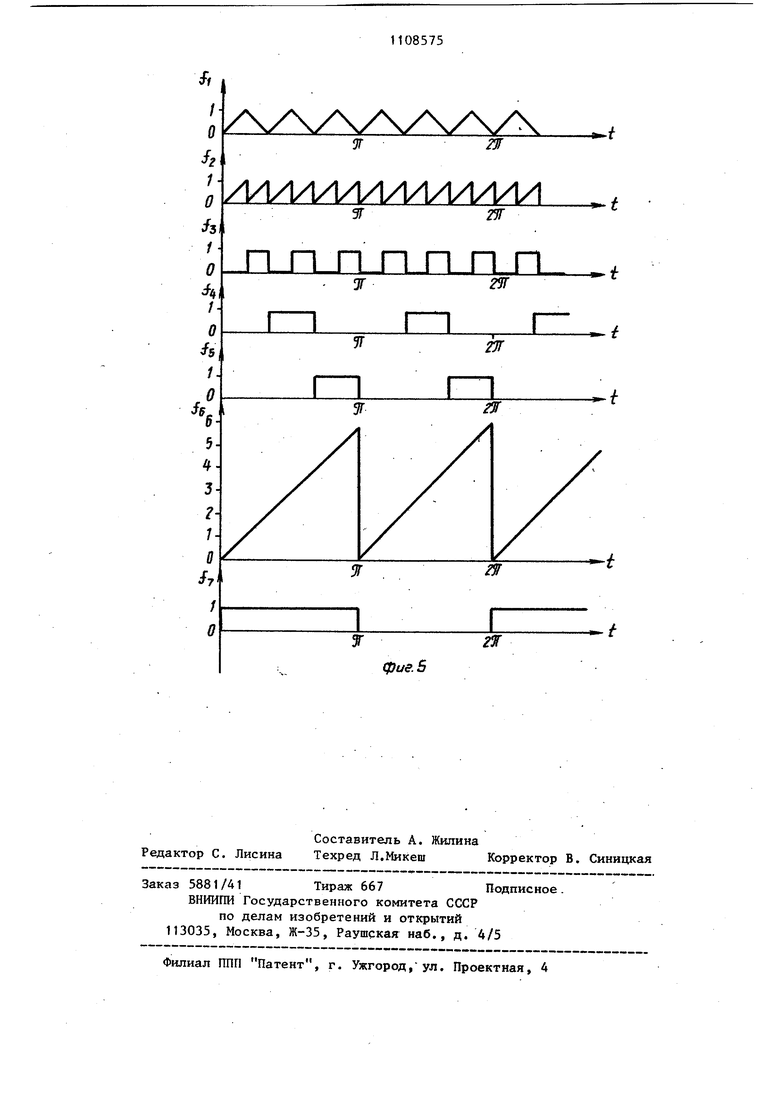
На выходе оптоэлектронной пары 10 формируется линейно нарастающий и спадающий сигнал, что обеспе швается установкой перед фотодиодом 20 этой оптоэлектронной пары диафрагмы с отверстием, угловой размер которого соответствует угловому размеру каждого из прозрачных и непрозрачных участков первой кольцевой дорожки 5. Указанный сигнал посТупает на вход линейного усилителя 25, на выходе которого получают сигнал f; (фиг. 5).
На выходах оптоэлектронных пар 11-14 формируются сигналы прямоуголь ных форм, что обеспечивается установками перед фотодиодами 21-24 этих оптоэлектронных пар диафрагм с щелевыми отверстиями. Указанные, сигналы поступают соответственно на входы формирователей 26-29 прямоугольных напряжений, на выходах которых получают сигналы f g , f , f р , (фиг. 5).
Сигналы f и f3 поступают на входы формирователя 31 пилообразного напряжения, на выходе которого получают сигнал fg.
Сигнал fj с выхода формирователя 31 пилообразного напряжения, а также Сигналы fg , f, f с выходов форг мирователей 26-28 прямоугольных напряжений поступают на вход сумматора 30, на выходе которого получают сигнал f, являющийся основным вькод
ным сигналом устройства для определения углового положения ротора. Амплитуды сигналов f.- f5 равны между собой. Линейно нарастающий сигнал f на выходе сумматора 30, выполненного на операционном усилителе, получается при определенном выборе величин резисторов во входных цепях и цепи обратной связи (фиг.4) Сигнал f на выходе формирователя ,29 прямоугольного напряжения соответствует полупериодам пилообразного сигнала f и является дополнителным выходным сигналом устройства для определения углового положения ротора.
Таким образом, выполнение обтюратора в виде диска с кольцевыми дороками, составленными из прозрачных и непрозрачных участков с определенными угловыми размерами, установка оптоэлектронных пар против указанных дорожек, введение формирователей пилообразного и прямоугольных напряжений и сумматора обеспечивает формирование на выходе устройства для определения углового положения ротора вентильного двигателя линейно нарастающего напряжения, соответствующего углу в пределах каждого полуоборота во всем диапазоне рабочих частот, включая нулевую, и с более высокой точностью в сравнении с известным устройством.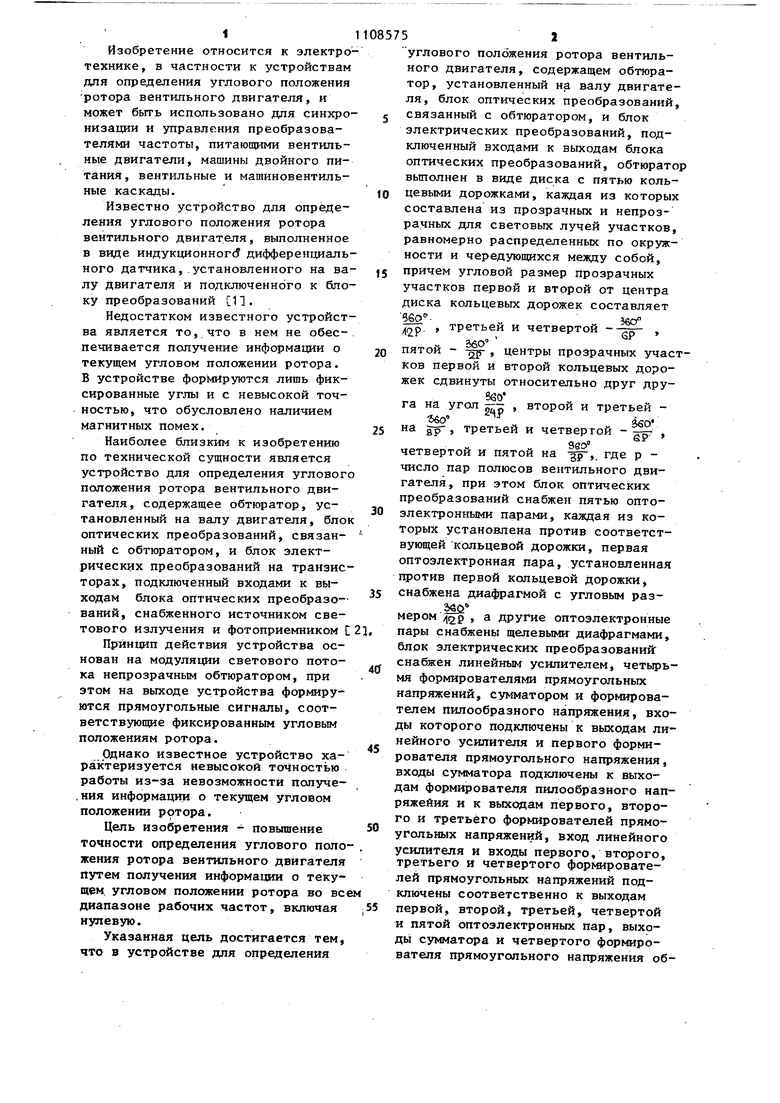
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения углового положения ротора вентильного двигателя | 1987 |
|
SU1427567A1 |
| Устройство для определения углового положения ротора вентильного электродвигателя | 1985 |
|
SU1295484A1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| Датчик положения вентильного двигателя | 1989 |
|
SU1744768A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ФАЗОМОМЕНТНЫХ ХАРАКТЕРИСТИК ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2129709C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050673C1 |
| Оптоэлектронный преобразователь перемещения в код | 1988 |
|
SU1569985A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2093810C1 |
| МОДУЛЬ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКОЙ КАРБЮРАТОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2182671C2 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕШЯ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА ВЕНТИЛЬНОГО ДВИГАТЕЛЯ, содержащее обтюратор, установленный на валу двигателя, блок оптических преобразований, связанный с обтюратором, и блок электрических преобразований, подключенный входами к выходам блока оптических преобразований, от л и.чающееся тем, что, с целью повышения точности определения углового положения ротора вентильного двигателя, обтюратор выполнен в виде диска с пятью кольцевыми дорожками, каждая из .которых составлена из прозрачных и непрозрачных для световых лучей участков, равномерно распределенных по окружности и чередующихся между собой, причем угловой размер прозрачных участков первой и второй от центра диска кольцевых дорожек составляет ° третьей И четвертой - , пятой 2р центры прозрачных участков первой и второй кольцевых дорожек сдвинуты относительно друг друга на угол ° , второй и третьей на ° , третьей и четвертой - на , четвертой и пятой - на Ш , где Р - число пар цолюсов вентильного двигателя, при этом блок оптических преобразований снабжен пятью оптоэлектронными парами, каждая из которых установлена против соответствующей кольцевой дорожки, первая оптоэлектронная пара, установленная против первой кольцевой дорожки, снабжена диафрагмой с угловьы разSeO мером - , а другие оптоэлектронные пары снабжены щелевыми диафрагi мами, блок электрических преобразований снабжен линейным усилителем, -четырьмя Формирователями прямоуголь- if ных напряжений, сумматором и формирователем пилообразного напряжения, входы которого подключены к вы-/ g ходам линейного усилителя и первого формирователя прямоугольного напряжения, входы сумматора подключены к выходам формирователя пило- . образного напряжения и к выходам первого, второго и третьего формирователей прямоугольных напряжений, 00 вход линейного усилителя и входы Сд первого, второго, третьего и чет вертого формирователей прямоугольных сд напряжений подключены соответственно к выходам первой, второй, третьей, четвертой и пятой оптоэлектронных пар, выходы сумматора и четвертого формирователя прямоугольного напряжения образуют соответственно основной и дополнительный выходы устройства для определения углового положения ротора вентильно- го двигателя.
4/
CZD
«
CZD
/f
fpaeS
/ff
фиеЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вентильные двигатели и их применение на электроподвижном составе | |||
| Под ред | |||
| Б.Н | |||
| Тихменева, М., Транспорт, 1976 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3559014, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
