, Предметом изобретения являются терхкомпонентные магнитоэлектрические весы для измерения малых сил в вакуумных трубах, выполненные в виде платформы, подвешенной к верхней раме основания на трех гибких нитях, снабженной державкой для креп.ления модели и индуктивным датчиком, предста зляющим чувствительный элемент для автоматического уравновешивания действуюших на модель сил.
Особенность предлагаемых весов, обеспечивающая исключение влияния на точность измерения сил наклонов основания зесов, заключается в том, что в них применена вторая платформа, подвешенная, как и первая, на нитях той же длины, причем одна из платформ несет якоря индуктивных датчиков, а вторая платформа - обмотки . индуктивных датчиков, aличиe нитей одинаковой длины на обеих платформах при наклоне основания приводит лишь к такому же наклону самого индуктивного датчика (т. е. и якоря и обмотки) без взаимного перемеш,ения якоря вдоль продольной оси обмотки и, следовательно, без каких-либо изменений в показании весов.
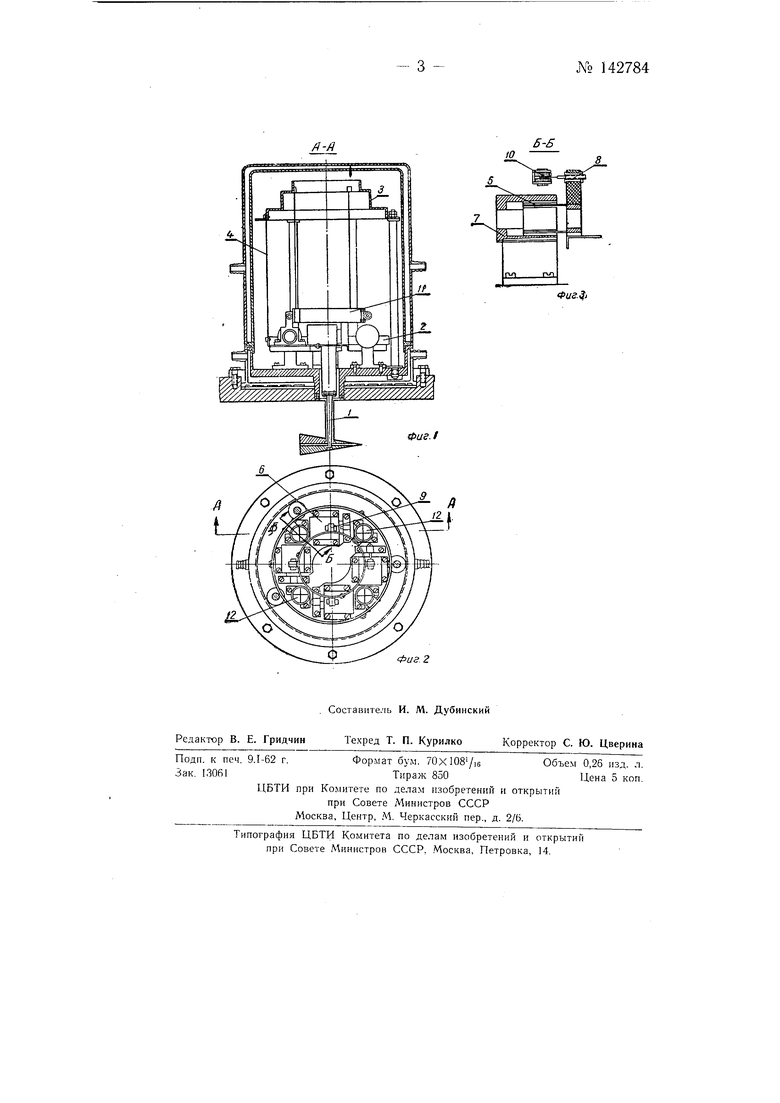
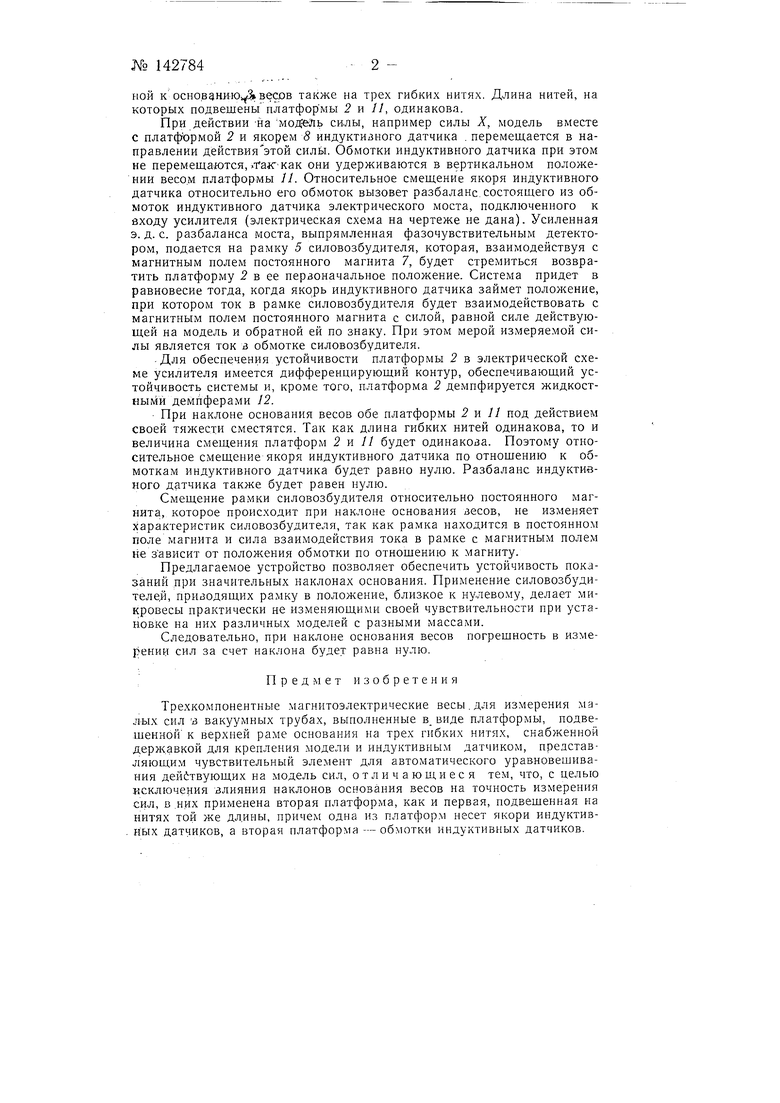
На фиг. 1 изображены трехкомпонентные магнитоэлектрические весы; на фиг. 2 - то же, вид сзерху; на фиг. 3 - то же, разрез по А-А на фиг. 2.
Испытуемая модель с помош,ью державки / закрепляется на платформе 2, которая подвешена к основанию 3 весов на трех гибких нитях 4.
На платформе 2 устанавливаются четыре рамки 5 четырех магнитных силовозбудителей 6. Рамки находятся в равномерном магнитном поле постоянных магнитов 7, закрепленных на оснозании весов. Кроме того, на платформе 2 закрепляются якори 8 индуктивных датчиков 5, обмотки W которых закрепляются на платформе //, подвешен№ 142784
ной к основзниЮ): весов также на трех гибких нитях. Длина нитей, на которых нодвешены платформы 2 и /Д одинакова.
При действиина си,лы, нанример силы X, модель вместе с платформой 2 и якорем 8 индуктивного датчика . перемещается в направлении действияэтой силы. Обмотки индуктивного датчика при этом не перемещаются, .ГаКкак они удерживаются в вертикальном положении весом платформы /У. Относительное смещение якоря индуктивного датчика относительно его обмоток вызовет разбаланс, состоящего из обмоток индуктивного датчика электрического моста, подключенного к входу усилителя (электрическая схема на чертеже не дана). Усиленная э. д. с. разбаланса моста, выпрямленная фазочувствительным детектором, подается на рамку 5 силовозбудителя, которая, взаимодействуя с магнитным полем постоянного магнита 7, будет стремиться возвратить платфор1му 2 в ее первоначальное положение. Система придет в равновесие тогда, когда якорь индуктивного датчика займет положение, при котором ток в рамке силовозбудителя будет взаимодействовать с магнитным полем постоянного магнита с силой, равной силе действующей на модель и обратной ей по знаку. При этом мерой измеряемой силы является ток з обмотке силовозбудителя.
Для обеспечения устойчивости платформы 2 в электрической схеме усилителя имеется дифференцирующий контур, обеспечивающий устойчивость системы и, кроме того, платформа 2 демпфируется жидкостными демпферами }2.
При наклоне основания весов обе платформы 2 и 11 под действием своей тяжести сместятся. Так как длина гибких нитей одинакова, то и величина смещения платформ 2 и // будет одинакова. Поэтому относительное смещение якоря индуктивного датчика по отношению к обмоткам индуктивного датчика будет равно нулю. Разбаланс индуктивного датчика также будет равен нулю.
Смещение рамки силовозбудителя относительно постоянного магнита, которое происходит при наклоне основания лесов, не изменяет характеристик силовозбудителя, так как рамка находится в постоянном поле магнита и сила взаимодействия тока в рамке с магнитным полем не зависит от положения обмотки по отношению к магниту.
Предлагаемое устройство позволяет обеспечить устойчивость показаний при значительных наклонах основания. Применение силовозбудителе,й, приводящих рамку в положение, близкое к нулевому, делает микровесы практически не изменяющими своей чувствительности при установке на них различных моделей с разными массами.
Следовательно, при наклоне основания весов погрешность в измерении сил за счет наклона будет равна нулю.
Предмет изобретения
Трехкомпонентные магнитоэлектрические весы, для измерения малых сил и вакуумных трубах, выполненные в виде платформы, подвешенной к верхней раме основания на трех гибких нитях, снабженной державкой для крепления модели и индуктивным датчиком, представляющим чувствительный элемент для автоматического уравновешивания действующих на модель сил, отличающиеся тем, что, с целью исключения влияния наклонов основания весов на точность измерения сил, в .них применена вторая платформа, как и первая, подвешенная на нитях той же длины, причем одна из платформ несет якори индуктивных датчиков, а вторая платформа - обмотки индуктивных датчиков.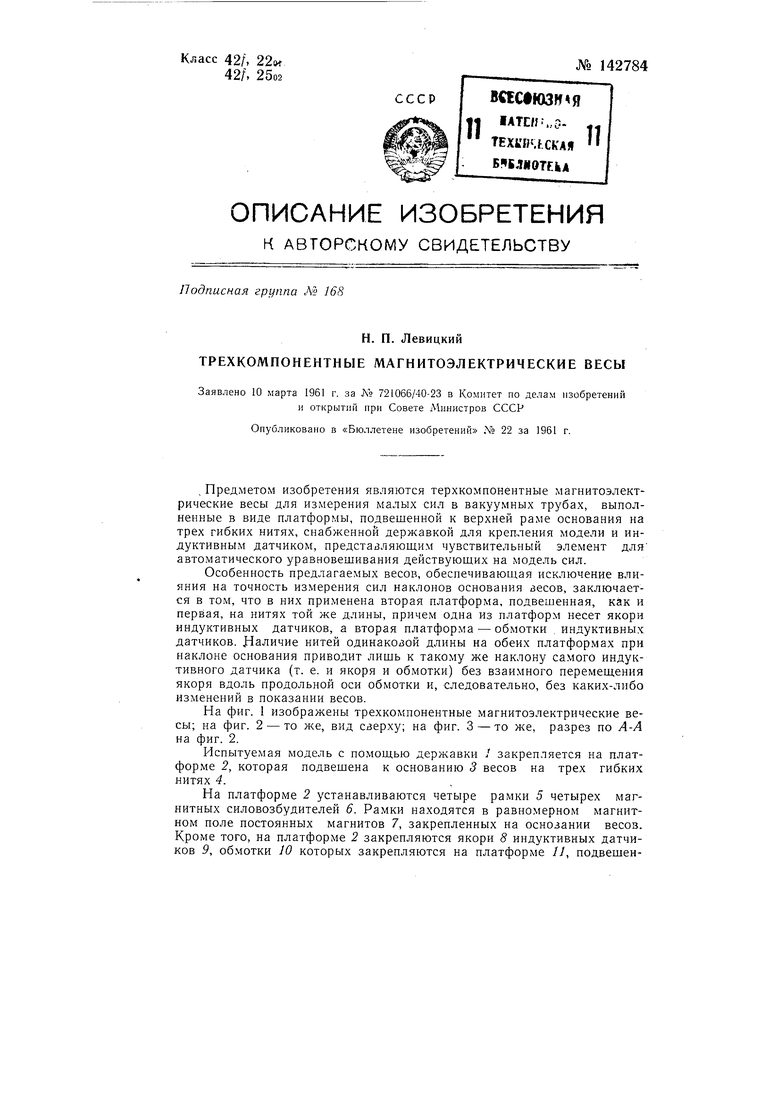
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкомпонентные магнитоэлектрические весы | 1975 |
|
SU524977A1 |
| МНОГОКОМПОНЕНТНЫЕ АЭРОДИНАМИЧЕСКИЕ МАГНИТОЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1968 |
|
SU231160A1 |
| АЭРОДИНАМИЧЕСКИЕ ЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1967 |
|
SU205347A1 |
| ПОНЕНТНЫЕ АЭРОДИНАМИЧЕСКИЕ МАГНИТОЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1969 |
|
SU239601A1 |
| Шестикомпонентные аэродинамические весы | 1961 |
|
SU152117A1 |
| Аэродинамические весы | 1961 |
|
SU149919A1 |
| ЭЛЕКТРОМАГНИТНОЕ ВЕСОВОЕ УСТРОЙСТВО | 1966 |
|
SU187346A1 |
| Аэродинамические весы с индукционным датчиком деформации упругих элементов | 1960 |
|
SU134059A1 |
| Магнитоэлектрический зеркальный гальванометр | 1934 |
|
SU73286A1 |
| СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1970 |
|
SU266293A1 |