(21)4164978/30-15
(22)22.12.86
(46) 07.10.88. Бюл. № 37
(71)Белорусский институт механизации сельского хозяйства
(72)Л. А. Вергейчик, П. В. Клавсуть, В. П. Буяшов, Б. М. Астрахан
и Г. А. Радищевский
(53)631.358(088.8)
(56)Авторское свидетельство СССР № 515490, кл. А 01 D 17/00, 1972.
Гидромеханические системы автоматического регулирования рабочих органов сельскохозяйственных машин. Типовые схемы. Расчет и выбор параметров. РТМ 23-2.72. - М., 1979, с. 34-35.
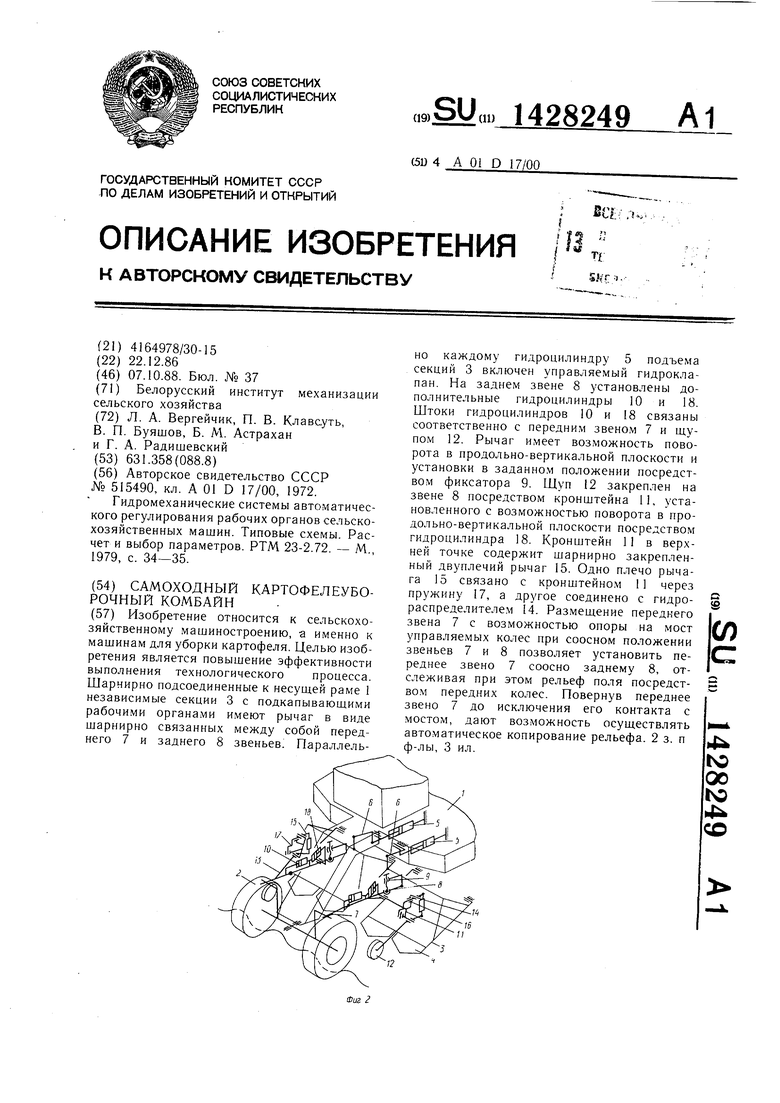
(54)САМОХОДНЫЙ КАРТОФЕЛЕУБОРОЧНЫЙ КОМБАЙН
(57)изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для уборки картофеля. Целью изобретения является повышение эффективности выполнения технологического процесса. Шарнирно подсоединенные к несупдей раме 1 независимые секции 3 с подкапывающими рабочими органами имеют рычаг в виде шарнирно связанных между собой переднего 7 и заднего 8 звеньев Параллельно каждому гидроцилиндру 5 подъема секций 3 включен управляемый гидроклапан. На заднем звене 8 установлены дополнительные гидроцилиндры 10 и 18. Штоки гидроцилиндров 10 и 18 связаны соответственно с передним звеном 7 и шу- пом 12. Рычаг имеет возможность поворота в продольно-вертикальной плоскости и установки в заданном положении посредством фиксатора 9. Щуп 12 закреплен на звене 8 посредством кронштейна 11, установленного с возможностью поворота в продольно-вертикальной плоскости посредством гидроцилиндра 18. Кронштейн 11 в верхней точке содержит шарнирно закрепленный двуплечий рычаг 15. Одно плечо рычага 15 связано с кронштейном 11 через пружину 17, а другое соединено с гидрораспределителем 14. Размещение переднего звена 7 с возможностью опоры на мост управляемых колес при соосном положении звеньев 7 и 8 позволяет установить переднее звено 7 соосно заднему 8, отслеживая при этом рельеф поля посредством передних колес. Повернув переднее звено 7 до исключения его контакта с мостом, дают возможность осуществлять автоматическое копирование рельефа. 2 з. п ф-лы, 3 ил.
с S
(Л
4;
N5
00 IN5
4
:о
Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для уборки картофеля.
Цель изобретения - повьинение эффек- THBHiocTH выполнения технологического процесса.
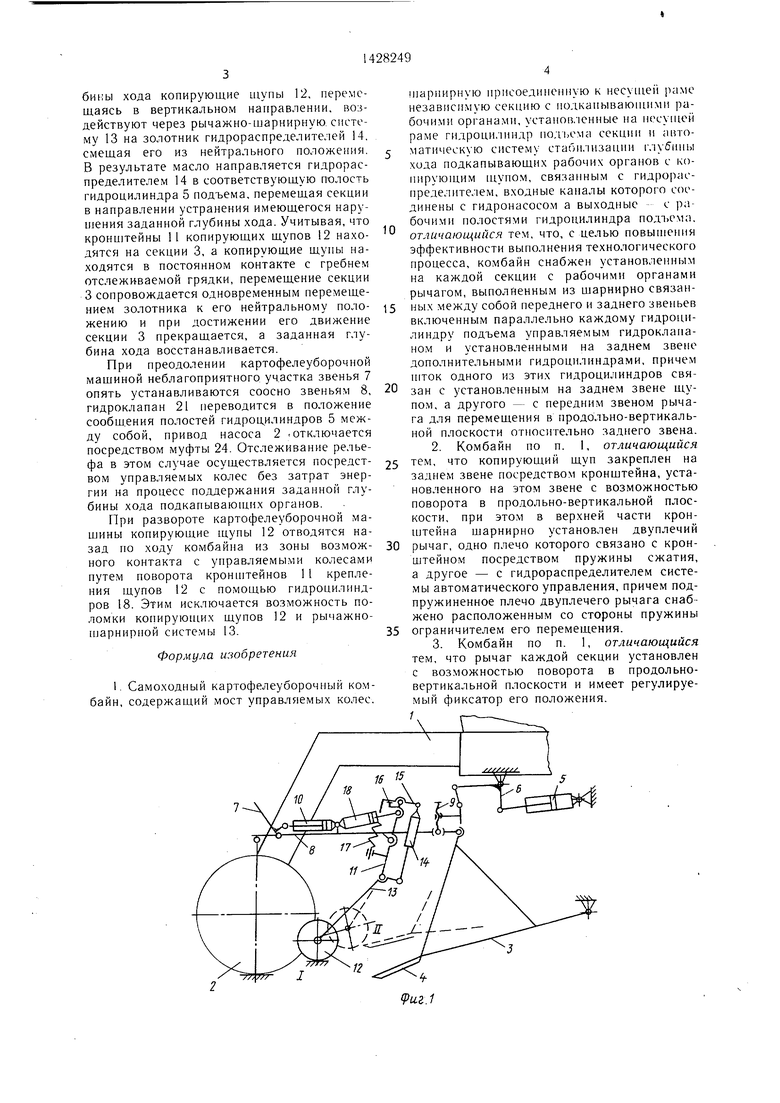
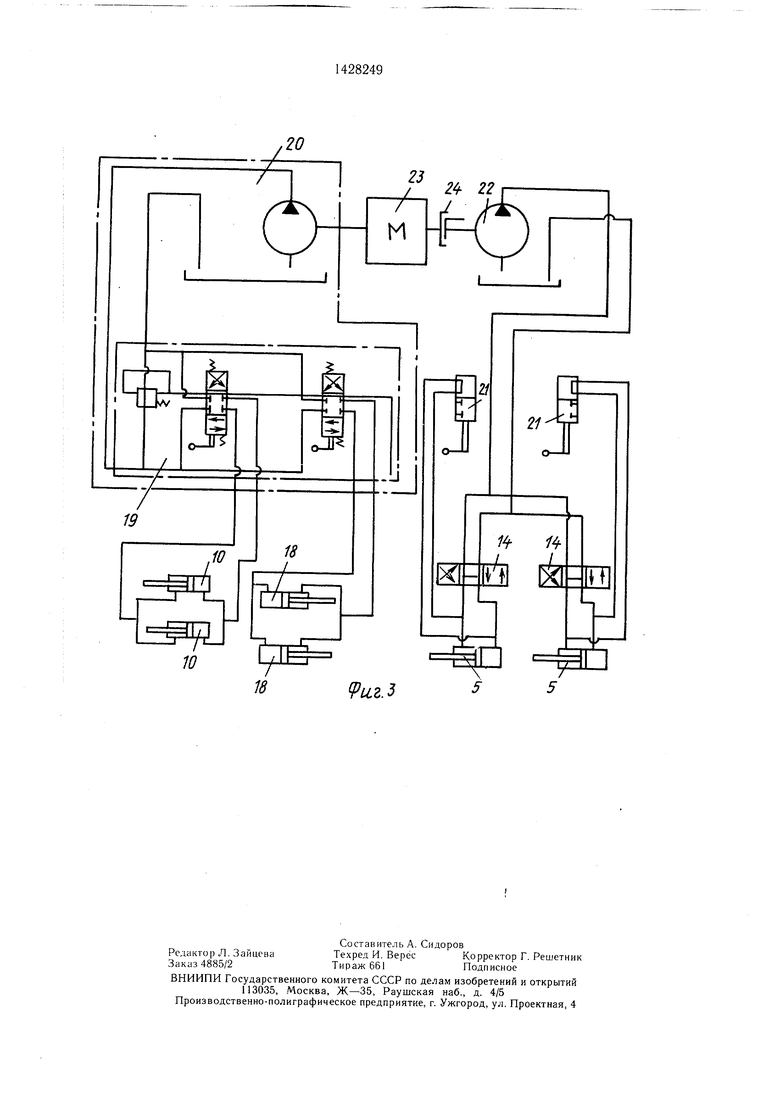
На фиг. 1 схематически изображен самоходный картофелеуборочный комбайн; на :фиг. 2 - схема комбайна, аксонометрия; на фиг. 3 - гидравлическая cxeivia комбайна.
Самоходный картофелеуборочный комбайн содержит несун1ую раму 1, шарнирно соединенный с ней мост управляемых колес: 2, присоединенные к несу1пей раме 1 секции 3 с подканываюшими органами 4, гидроцилиндры 5 подъема, установленные на :раме 1 и связанные с секциями 3 че- рез: шарнирно-рычажную систему 6. Ма передней части секции 3 установлены pi i4aru в виде шарнирно соединенных передних 7 и задних 8 звеньев. Звенья 8 соединены с секцией с возможностью новорота в продольно-вертикальной плоскости, а их заданное положение и положение звеньев 7 но и| 1соте может быть установлено посредством регулируемых винтовых фиксаторов 9. Звенья 7 связаны с дополнитель- ными гпдроцилиндрамп 10 н с их помощью мопл т быть установлены сооспо звеньям 8 или повернуты относительно их вверх т продольно-вертикальной плоскости. В первом случае секции 3 через звенья 7 могут оипраться на мост управляемых колес 2, во втором контакт звеньев 7 с мостом управляемых колес исключен. На звеньях 8 нтрнирно закреплены кронштейны 11 креи- ле1шя копирующих щупов 12. Щупы 12 связаны через шарнирно-рычажную систему 13 с золотниками гидрораснределителей 14 автоматического унравления корпуса которых соединены с двуплечими рычагами 15, установленными на кронн1тейнах- 11 с ограничением поворота в одну сторону упорами 16 и связанными с пружинами 17 растяжения.
Кронштейны И связаны с установленными на. звеньях 8 дополнительными гидроцилиндрами 18, с помощью которых
2
0
5
Параллельно гидроцилиндрам 5 подъема включены двухпозиционные гидроклапаны 21 с ручным управлением. В одном положении гидроклапанов 21 рабочие полости каж- г дого гидроцилиндра 5 сообщаются между собой, а в другом разобщены. Для пита- пия автоматической системы стабилизации глубины хода предназначен гидронасос 22, приводящийся в движение от двигателя 23 машины п имеющий в своем приводе дис0 тапционно управляемую отключаемую муфту 24.
Работа картофелеуборочного комбайна осуществляется следующим образом.
При движении комбайна управляемые
г колеса 2 моста, установленные в рабочее положенпе 1 копирующие щупы 12 отслеживают рельеф соответственно средних борозд и крайних гребней грядок, подкапываемых каждой секцией 3. При работе комбайна на равном участке поля с достаточно высокой и одинаковой но гону песушей способностью звенья 7 предварительно устанавливаются соосно звеньям 8, а гидроклапайы 21 ставятся в положение, при котором рабочие полости каждого гидро- цилиндра сообщаются между собой. Кроме того, привод насоса 22 отключается муфтой 24.
В этом случае секции 3 через звенья 7 опираются на мост управляемых колес 2, а гидроцилиндры 5 в силу свободного
„ перераспределения масла между их полостями не ограничивают перемешений секций 3. В связи с тем, что гидрораспределителя- мп 14 подача масла от насоса 22 не производится, и в результате автоматическая система стабилизации не функционирует,
r глубина подкапывания определяется положением управляемых колес. Так как при указанных условиях деформация шин и почва по гону постоянпы, то глубина хода при движении комбайпа не изменяется. В связи с отключенным приводом насоса 22 процесс поддержания заданной глубины хода подкапывающих органов осуществляется без затрат энергии. При выезде комбайна на участок с неблагоприятными условиями, а именно с неровным рельефом и не0
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Устройство для автоматического направления сельскохозяйственной машины по борозде | 1987 |
|
SU1510738A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| КАРТОФЕЛЕУБОРОЧНЫЙ КОМБАЙН | 1972 |
|
SU427666A1 |
| КАРТОФЕЛЕУБОРОЧНЫЙ КОМБАЙН | 1973 |
|
SU377108A1 |
| Устройство для стабилизации глубины хода подкапывающих органов корнеклубнеуборочной машины | 1988 |
|
SU1563608A1 |
| Самоходный картофелеуборочный комбайн | 1972 |
|
SU515490A1 |
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 1991 |
|
RU2065260C1 |
| Самоходный картофелеуборочный комбайн | 1989 |
|
SU1780618A1 |
путем поворота кронштейнов 11 копирующиеодинаковой по гону несущей способностью
щупы 12 могут быть перемещены в про- - почвы, звенья 7 с помощью гидроцилинддольно-вертикальной плоскости и установле-ррв 10 переводятся в верхнее положение,
ны в два положения; вынесены вперед поОдновременно гидроклапаны 21 ставятся в ходу комбайна на необходимое расстояние
положение разобщения рабочих полостей гидроцилйндров 5 и замыканием муфты 24
относительно подкапывающих органов (поположение разобщения рабочих полостей гидроцилйндров 5 и замыканием муфты 24
ложение 1) или расположены рядом с ни- Q включается привод- насоса 22. В резульми н, тем самым, выведены из зоны возможного контакта с колесами 2 управляемого моста при их повороте в сторону (ноложение (И). Этим самым исключается поломка копирующих щупов при развороте картофелеуборочного комбайна.
Гидроцилиндры 10 п 18 гидравлически связаны с гидрораспределителем 19 руч- иого управления основной гидросистемы 20.
тате этого осуществляется подача масла к гидрораспределителям 14 и устраняется возможность перетока масла из одной рабочей полости гидроцилиндров подъема 5 в другую. Если золотник гидрораспределителя 55 14 находится в нейтральном положении, что имеет место при соответствии фактической глубины хода заданному значению, масло идет на слив. При нарушении заданной глуОдновременно гидроклапаны 21 ставятся в
положение разобщения рабочих полостей гидроцилйндров 5 и замыканием муфты 24
включается привод- насоса 22. В результате этого осуществляется подача масла к гидрораспределителям 14 и устраняется возможность перетока масла из одной рабочей полости гидроцилиндров подъема 5 в другую. Если золотник гидрораспределителя 14 находится в нейтральном положении, что имеет место при соответствии фактической глубины хода заданному значению, масло идет на слив. При нарушении заданной глубины хода копирующие щупы 12, перемещаясь в вертикальном направлении, воздействуют через рычажно-шарнирную систему 13 на золотник гидрораспределителей 14, смещая его из нейтрального положения. В результате масло направляется гидрораспределителем 14 в соответствующую полость гидроцилиндра 5 подъема,перемещая секции в направлении устранения имеющегося нару- заданной глубины хода. Учитывая, что кронштейны 11 копирующих щупов 12 находятся на секции 3, а копирующие щупы находятся в постоянном контакте с гребнем отслеживаемой грядки, перемещение секции 3 сопровождается одновременным перемещением золотника к его нейтральному положению и при достижении его движение секции 3 прекращается, а заданная глубина хода восстанавливается.
При преодолении картофелеуборочной мащиной неблагоприятного участка звенья 7 опять устанавливаются соосно звеньям 8, гидроклапан 21 переводится в положение сообщ,ения полостей гидроп илиндров 5 между собой, привод насоса 2 .отключается посредством муфты 24. Отслеживание рельефа в этом случае осуществляется посредством управляемых колес без затрат энергии на процесс поддержания заданной глубины хода подкапываюпхих органов.
При развороте картофелеуборочной ма- щины копируюп ие щупы 12 отводятся назад по ходу комбайна из зоны возможного контакта с управляемыми колесами путем поворота крон1птейнов 1 I крепления щупов 12 с помощью гидроцилиндров 18. Этим исключается возможность поломки копирующих щупов 12 и рычажно- пJapниpнoй системы 13.
Формула изобретения
0
5
0
5
0
5
шарнирную присоединенную к несущей раме независимую секцию с подкапываюпи1ми рабочими органами, установ,генные на несущей раме гидроцилиндр подъема секции и автоматическую систему стабилизации глубины хода подкапывающих рабочих органов с копирующим щупом, связанным с гидрораспределителем, входные каналы которого соединены с гидронасосом а выходные с рабочими полостями гидроцилиндра , отличающийся тем, что, с целью повышения эффективности выполнения технологического процесса, комбайн снабжен установленным на каждой секции с рабочими органами рычагом, выполйенным из щарнирно связанных между собой переднего и заднего звеньев включенным параллельно каждому гидроцилиндру подъема управляемым гидроклапаном и установленными на заднем звене дополнительными гидроцилиндрами, причем шток одного из этих гидроцилиндров связан с установленным на заднем звене щупом, а другого - с передним звеном рычага для перемещения в продольно-вертикальной плоскости относительно заднего звена.
J
оЬж1
9и,г.З
