7
ел
CAS 00
Изобретение относится к сельскохозяйственному машиностроению, в частности к системам автоматического вождения сельскохозяйственных машин.
Цель изобретения - повышение надежности и расширение функциональных возможностей устройства.
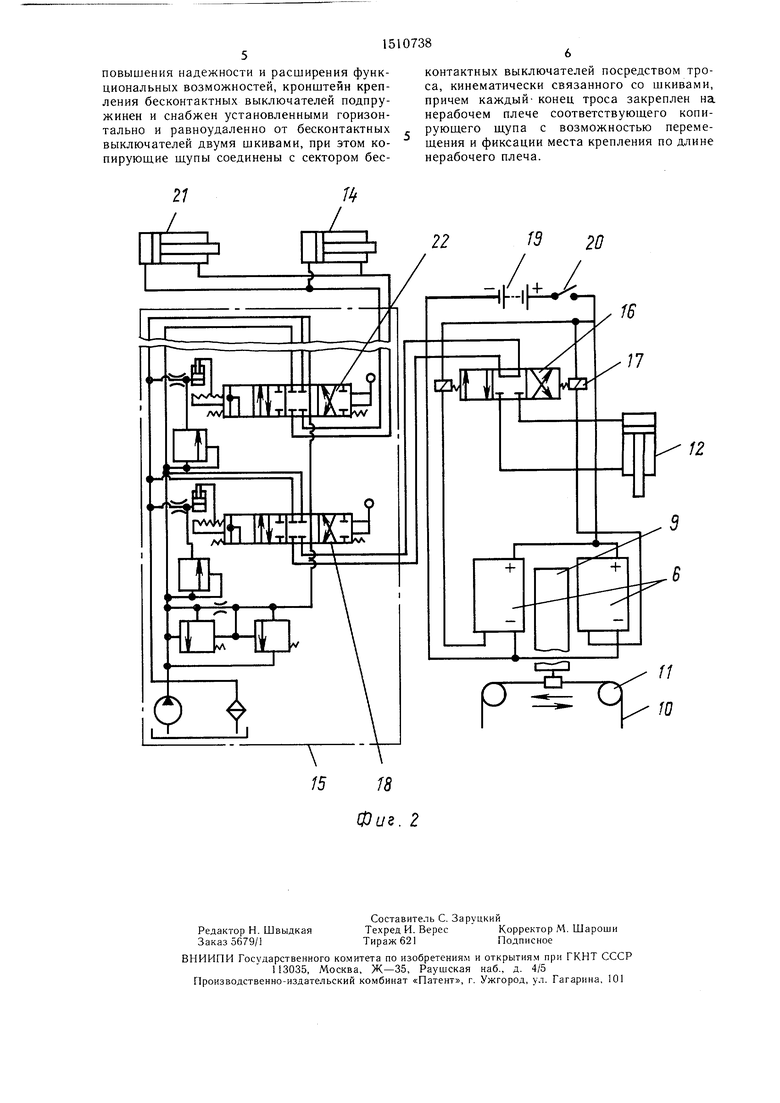
На фиг. 1 изображена принципиальная схема устройства (применительно к прицен- ной сельхозмашине, например картофелеуборочному комбайну КПК-3); на фиг. 2 - электрогидравлическая схема устройства.
Устройство включает два щупа 1 и 2, шарнирно закрепленных на рамке 3, которая установлена в шарнирах на раме 4 машины.
10
переведен в рабочее положение, например «Подъем, для осуществления гидропитания электрогидрораспределителя 16. Если в процессе движения комбайна его подкапывающие органы отклоняются от борозд, например, вправо по ходу движения машины, то щуп 1 опускается, а щуп 2 поднимается. Это вызывает движение троса 10, сектор 9 перемещается к одному из БВК 6 и вызывает его срабатывание. В результате подачи напряжения на соответствующий электромагнит 17 золотник электрогидрораспределителя 16 смещается из нейтрального положения, и масло под давлением поступает к гидроцилиндру 12, вызывая смещение
Кронштейн 5 с бесконтактными выключате- с передней части комбайна с подкапывающими лями 6 (БВК), например, типа ПИШ-6-1органами влево относительно трактора. При
раме
25
установлен на раме 4 с возможностью перемещения в направляющих 7 и подпружинен относительно рамы 4 посредством пружины 8 растяжения. Металлический сектор 9 связан с тросом 10, который пере- 20 кинут через шкивы 11, установленные на кронштейне 5 равноудалено от БВК 6. Для подбора необходимой чувствительности следящего привода трос 10 может присоединяться к щупам 1 и 2 в точках «а или «б, т.е. точки крепления троса 10 к щупам 1 и 2 могут регулироваться по высоте. На раме 4 закреплен силовой гидроцилиндр 12, соединенный щтоком с прицепной сницей 13, которая установлена на раме 4 в шарнире с возможностью пово- зо рота в горизонтальной плоскости. С целью подъема щупов 1 и 2 в транспортное положение рамка 3 может поворачиваться относительной рамы 4 с помощью гидроцилиндра 14.
возвращении подкатывающих органов в исходное положение относительно продольных осей борозд щупы 1 и 2 и сектор 9 также возвращаются в исходное положение, при достижении которого движение штока гидроцилиндра 12 прекращается.
Помехи в виде изменения профиля борозд по высоте устройством автоматического направления не отрабатываются, так как при одновременном подъеме или опускании щупов 1 и 2 в результате натяжения или ослабления троса 10, подпружиненный кронштейн 5 с БВК 6 смещается в направляющих 7, а положение сектора 9 относительно БВК 6 не меняется.
Необходимая чувствительность следящего привода устройства в зависимости от поступательной скорости комбайна регулируется путем изменения положения точек крепления троса 10 к щупам 1 и 2 - трос 10 может крепиться к щупам 1 и 2 в точках
Электрогидравлическая схема (фиг. 2) 35 - б, что позволяет расширить функсодержит насосную установку 15 (гидросистема трактора),электрогидрораспредели- тель 16 автоматического управления с электромагнитами 17. Электрогидрораспре- делитель 16 гидравлически связан с гидроциональные возможности устройства.
Подъем щупов 1 и 2 в транспортное положение осуществляется одновременно с подъемом подкапывающих органов при перецилиндром 12 .и секцией 18 гидрораспре- воде золотника секции 22 гидрораспреде- делителя трактора, а электромагниты 17 и лителя трактора из нейтрального положения
в положение «подъем. Предварительно контакты выключателя 20 должны быть разомкБВК 6 в соответствии со схемой (фиг. 2) подключены к аккумуляторной батарее 19 через выключатель 20. Гидроцилиндр 14 поднуты, а золотник секции 18 гидрораспредеключен параллельно гидроцилиндру 21, кото- лителя трактора должен быть переведен в
рый связан с секцией 22 гидрораспределителя трактора и служит для подъема в транспортное положение подкапывающих рабочих органов картофелеуборочного комбайна (секция подкапывающих органов на фиг. 1 не показана).
Устройство работает следующим образом.
При работе картофелеуборочного комбайна рамка 3 опущена (фиг. 1) и щупы 1 и 2 движутся по боковой поверхности
50
нейтральное положение. При этом обесточивается электросхема и отключается гидропитание электрогидрораспределителя 16.
Формула изобретения
Устройство для автоматического направления сельскохозяйственной мащины по борозде, содержащее копирующие щупы, выполненные в виде двуплечих рычагов, шарнирно соединенных с рамой и связанкартофельных грядок, выключатель 20 замк- 55 ные с сектором бесконтактных выключате
переведен в рабочее положение, например «Подъем, для осуществления гидропитания электрогидрораспределителя 16. Если в процессе движения комбайна его подкапывающие органы отклоняются от борозд, например, вправо по ходу движения машины, то щуп 1 опускается, а щуп 2 поднимается. Это вызывает движение троса 10, сектор 9 перемещается к одному из БВК 6 и вызывает его срабатывание. В результате подачи напряжения на соответствующий электромагнит 17 золотник электрогидрораспределителя 16 смещается из нейтрального положения, и масло под давлением поступает к гидроцилиндру 12, вызывая смещение
5
0 о
возвращении подкатывающих органов в исходное положение относительно продольных осей борозд щупы 1 и 2 и сектор 9 также возвращаются в исходное положение, при достижении которого движение штока гидроцилиндра 12 прекращается.
Помехи в виде изменения профиля борозд по высоте устройством автоматического направления не отрабатываются, так как при одновременном подъеме или опускании щупов 1 и 2 в результате натяжения или ослабления троса 10, подпружиненный кронштейн 5 с БВК 6 смещается в направляющих 7, а положение сектора 9 относительно БВК 6 не меняется.
Необходимая чувствительность следящего привода устройства в зависимости от поступательной скорости комбайна регулируется путем изменения положения точек крепления троса 10 к щупам 1 и 2 - трос 10 может крепиться к щупам 1 и 2 в точках
циональные возможности устройства.
в положение «подъем. Предварительно контакты выключателя 20 должны быть разомкнуты, а золотник секции 18 гидрораспределителя трактора должен быть переведен в
лителя трактора должен быть переведен в
50
нейтральное положение. При этом обесточивается электросхема и отключается гидропитание электрогидрораспределителя 16.
Формула изобретения
Устройство для автоматического направления сельскохозяйственной мащины по борозде, содержащее копирующие щупы, выполненные в виде двуплечих рычагов, шарнирно соединенных с рамой и связан 55 ные с сектором бесконтактных выключате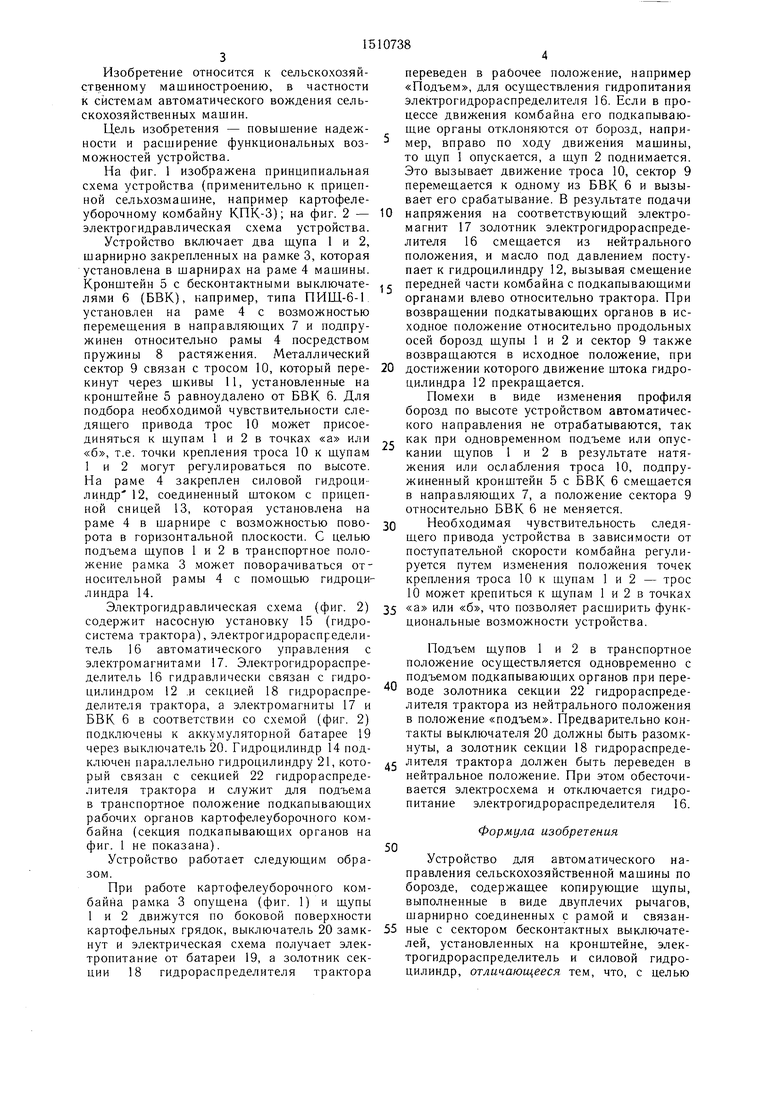
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Самоходный картофелеуборочный комбайн | 1986 |
|
SU1428249A1 |
| Подкапывающая секция картофелеуборочного комбайна | 2023 |
|
RU2826306C1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| КАРТОФЕЛЕУБОРОЧНАЯ МАШИНА | 2002 |
|
RU2235452C2 |
| Система автоматического направления подбирающего рабочего органа на ленту льна | 1990 |
|
SU1755726A1 |
| Самоходный многорядный картофелеуборочный комбайн | 1985 |
|
SU1253464A1 |
| Устройство для автоматического направления движения колесного трактора | 1982 |
|
SU1099865A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к системам автоматического вождения сельскохозяйственных машин. Цель изобретения - повышение надежности и расширение функциональных возможностей устройства. Щупы 1 и 2 устройства закреплены шарнирно на рамке 3. Кронштейн 5 установлен в направляющих 7 и подпружинен относительно рамы 4. На кронштейне 5 расположены бесконтактные выключатели 6, металлический сектор 9 и шкивы 11. Нерабочие части щупов 1 и 2 соединены между собой тросом 10, который проходит через равноудаленные от металлического сектора 9 шкивы 11. Одновременное перемещение щупов 1 и 2 перемещения металлического сектора 9 не вызывает. Устройство на помеху не реагирует. При раздельном перемещении щупов 1, 2 перемещается металлический сектор 9. Появляется управляющий сигнал и направление движения машины корректируется. Перемещение точек крепления троса 10 по нерабочим плечам щупов 1, 2 позволяет применять устройство при работе с разными сельскохозяйственными культурами. 2 ил.
нут и электрическая схема получает электропитание от батареи 19, а золотник секции 18 гидрораспределителя трактора
леи, установленных на кронштейне, элек- трогидрораспределитель и силовой гидроцилиндр, отличающееся тем, что, с целью
повышения надежности и расширения функциональных возможностей, кронштейн крепления бесконтактных выключателей подпружинен и снабжен установленными горизонтально и равноудаленно от бесконтактных выключателей двумя шкивами, при этом ко- пируюшие ш,упы соединены с сектором бес21
контактных выключателей посредством троса, кинематически связанного со шкивами, причем каждый- конец троса закреплен на. нерабочем плече соответствующего копирующего щупа с возможностью перемещения и фиксации места крепления по длине нерабочего плеча.
/2
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
