(Л
4 1чЭ
00 О5 О5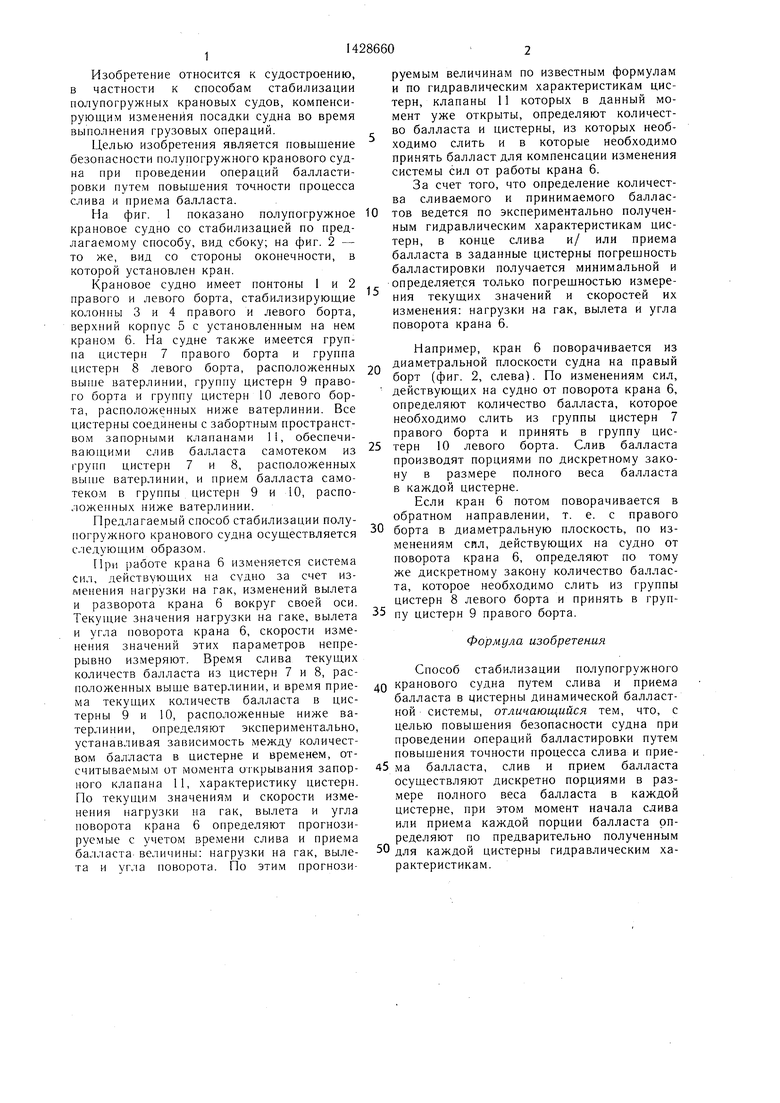
| название | год | авторы | номер документа |
|---|---|---|---|
| Противокреновая балластная система полупогружного судна | 1986 |
|
SU1357308A1 |
| Способ кренования плавсредства | 1981 |
|
SU979198A1 |
| Плавучий кран | 1977 |
|
SU719085A1 |
| Способ загрузки грузового транспортного судна плавучими грузовыми емкостями перед их перевозкой и грузовое транспортное судно | 1982 |
|
SU1409127A3 |
| Система компенсации крена плавучего средства | 1981 |
|
SU996264A1 |
| МОРСКОЕ САМОХОДНОЕ САМОПОДЪЕМНОЕ КРАНОВОЕ СУДНО | 2015 |
|
RU2603423C1 |
| Способ кренования судна | 1987 |
|
SU1495202A1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| Система компенсации крена плавучего средства | 1980 |
|
SU887354A1 |
| Плавучий кран | 1981 |
|
SU981194A2 |

Изобретение относится к судостроению, в частности к способам стабилизации полупогружных крановых судов, компенсирующим изменения посадки судна вс; время выполнения грузовых oncpamiii. Цсмь изобретения - повын1ение безопасности суд на при проведении операций балластировки путем повышения точности процесса слива и приема балласта. При осуществлении способа стабилизации слив и нрием балласта осуществляют порциями в размере полного его веса в каждой цистерне по дискретному закопу, а момент начала слива и прие.ма 6a.i.iacra определяют по предварительно п().-1ученпым для каждой цистерны гидравлическим а- рактеристика.м. 2 ил.
9иг.1
Изобретение относится к судостроению, в частности к способам стабилизации полупогружных крановых судов, компенсирующим изменения посадки судна во время выполнения грузовых операций.
Целью изобретения является повышение безопасности полупогружного кранового судна при проведении операций балластировки путем повышения точности процесса слива и приема балласта.
руемым величинам по известным формулам и по гидравлическим характеристикам цистерн, клапаны 11 которых в данный момент уже открыты, определяют количество балласта и цистерны, из которых необходимо слить и в которые необходимо принять балласт для компенсации изменения системы сил от работы крана 6.
За счет того, что определение количества сливаемого и принимаемого балласНа фиг. 1 показано полупогружное 10 тов ведется по экспериментально полученкрановое судно со стабилизацией по предлагаемому способу, вид сбоку; на фиг. 2 - то же, вид со стороны оконечности, в которой установлен кран.
Крановое судно имеет понтоны 1 и 2 правого и левого борта, стабилизирующие колонны 3 и 4 правого и левого борта, верхний корпус 5 с установленным на нем краном 6. На судне также имеется группа цистерн 7 правого борта и группа цистерн 8 левого борта, расположенных вьпие ватерлинии, группу цистерн 9 правого борта и группу цистерн 10 левого борта, расположенных ниже ватерлинии. Все цистерны соединены с забортнььм пространством запорными клапанами 11, обеспечивающими слив балласта самотеком из i pynn цистерн 7 и 8, расположенных BtjiHje ватерлинии, и прием балласта самотеком в группы цистерн 9 и 10, расположенных ниже ватерлинии.
Предлагаемый способ стабилизации полу15
ным гидравлическим характеристикам цистерн, в конце слива и/ или приема балласта в заданные цистерны погрешность балластировки получается минимальной и определяется только погрешностью измерения текущих значений и скоростей их изменения: нагрузки на гак, вылета и угла поворота крана 6.
20
Например, кран 6 поворачивается из диаметральной плоскости судна на правый борт (фиг. 2, слева). По изменениям сил, действующих на судно от поворота крана 6, определяют количество балласта, которое необходимо слить из группы цистерн 7 правого борта и принять в группу цис- 25 терн 10 левого борта. Слив балласта производят порциями по дискретному закону в размере полного веса балласта в каждой цистерне.
Если кран 6 потом поворачивается в обратном направлении, т. е. с правого
погружного кранового судна осуществляется борта в диаметральную плоскость, по изследующим образом.
При работе крана 6 изменяется система сил, действующих на судно за счет изменения нагрузки на гак, изменений вылета и разворота крана 6 вокруг своей оси.
менениям сйл, действующих на судно от поворота крана 6, определяют по тому же дискретному закону количество балласта, которое необходимо слить из группы цистерн 8 левого борта и принять в групТекущие значения нагрузки на гаке, вылета - пу цистерн 9 правого борта, и угла поворота крана 6, скорости измеФормула изобретения
Способ стабилизации полупогружного положенных выше ватерлинии, и время прие- дО кранового судна путем слива и приема
нения значении этих параметров ненре- рывно измеряют. Время слива текущих количеств балласта из цистерн 7 и 8, расма текущих количеств балласта в цистерны 9 и 10, расположенные ниже ватерлинии, определяют экспериментально, устанавливая зависимость между количеством балласта в цистерне и временем, отсчитываемым от момента открывания запорного клапана 11, характеристику цистерн. По текущим значениям и скорости изменения нагрузки на гак, вылета и угла поворота крана 6 определяют прогнозируемые с учетом времени слива и приема балласта величины: нагрузки на гак, вылета и угла поворота. По этим прогнозибалласта в цистерны динамической балластной системы, отличающийся тем, что, с целью повыщения безопасности судна при проведении операций балластировки путе.м повышения точности процесса слива и прие- 45 ма балласта, слив и прием балласта осушествляют дискретно порциями в размере полного веса балласта в каждой цистерне, при этом момент начала слива или приема каждой порции балласта определяют по предварительно полученным
50
для каждой цистерны гидравлическим характеристикам.
руемым величинам по известным формулам и по гидравлическим характеристикам цистерн, клапаны 11 которых в данный момент уже открыты, определяют количество балласта и цистерны, из которых необходимо слить и в которые необходимо принять балласт для компенсации изменения системы сил от работы крана 6.
За счет того, что определение количества сливаемого и принимаемого балластов ведется по экспериментально получен
ным гидравлическим характеристикам цистерн, в конце слива и/ или приема балласта в заданные цистерны погрешность балластировки получается минимальной и определяется только погрешностью измерения текущих значений и скоростей их изменения: нагрузки на гак, вылета и угла поворота крана 6.
Например, кран 6 поворачивается из диаметральной плоскости судна на правый борт (фиг. 2, слева). По изменениям сил, действующих на судно от поворота крана 6, определяют количество балласта, которое необходимо слить из группы цистерн 7 правого борта и принять в группу цис- терн 10 левого борта. Слив балласта производят порциями по дискретному закону в размере полного веса балласта в каждой цистерне.
Если кран 6 потом поворачивается в обратном направлении, т. е. с правого
борта в диаметральную плоскость, по изборта в диаметральную плоскость, по изменениям сйл, действующих на судно от поворота крана 6, определяют по тому же дискретному закону количество балласта, которое необходимо слить из группы цистерн 8 левого борта и принять в группу цистерн 9 правого борта,
Способ стабилизации полупогружного дО кранового судна путем слива и приема
балласта в цистерны динамической балластной системы, отличающийся тем, что, с целью повыщения безопасности судна при проведении операций балластировки путе.м повышения точности процесса слива и прие- 45 ма балласта, слив и прием балласта осушествляют дискретно порциями в размере полного веса балласта в каждой цистерне, при этом момент начала слива или приема каждой порции балласта определяют по предварительно полученным
50
для каждой цистерны гидравлическим характеристикам.
| Плавучий кран | 1977 |
|
SU719085A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
