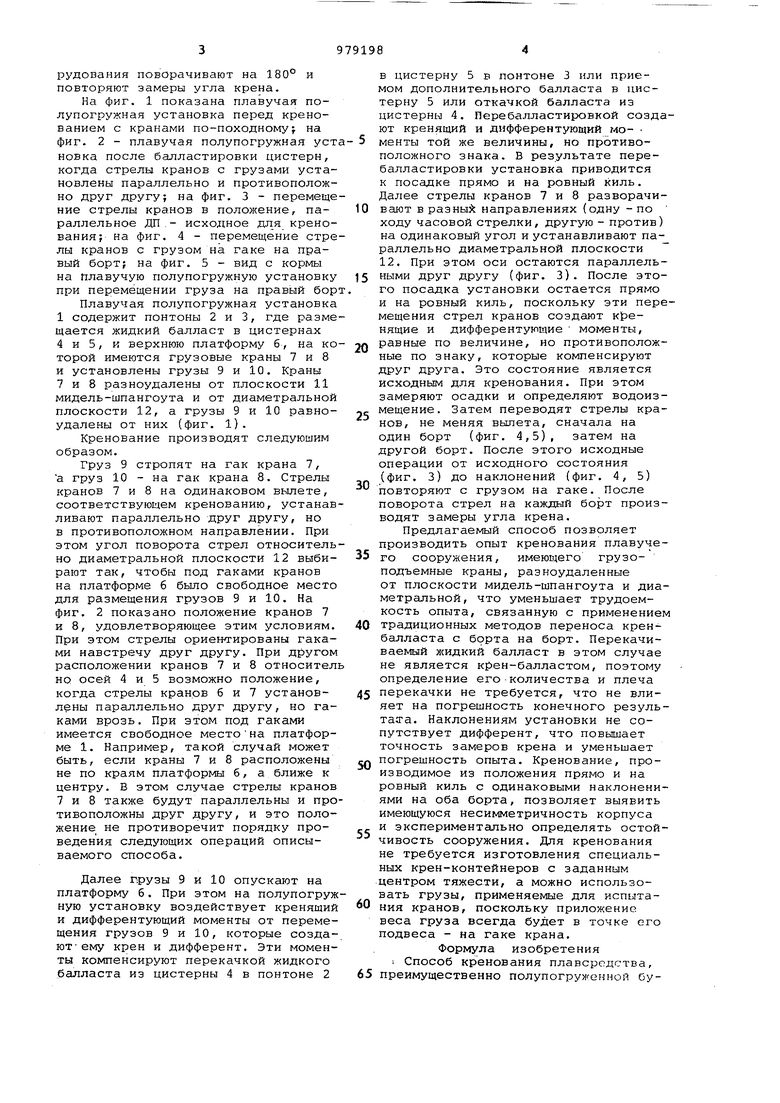
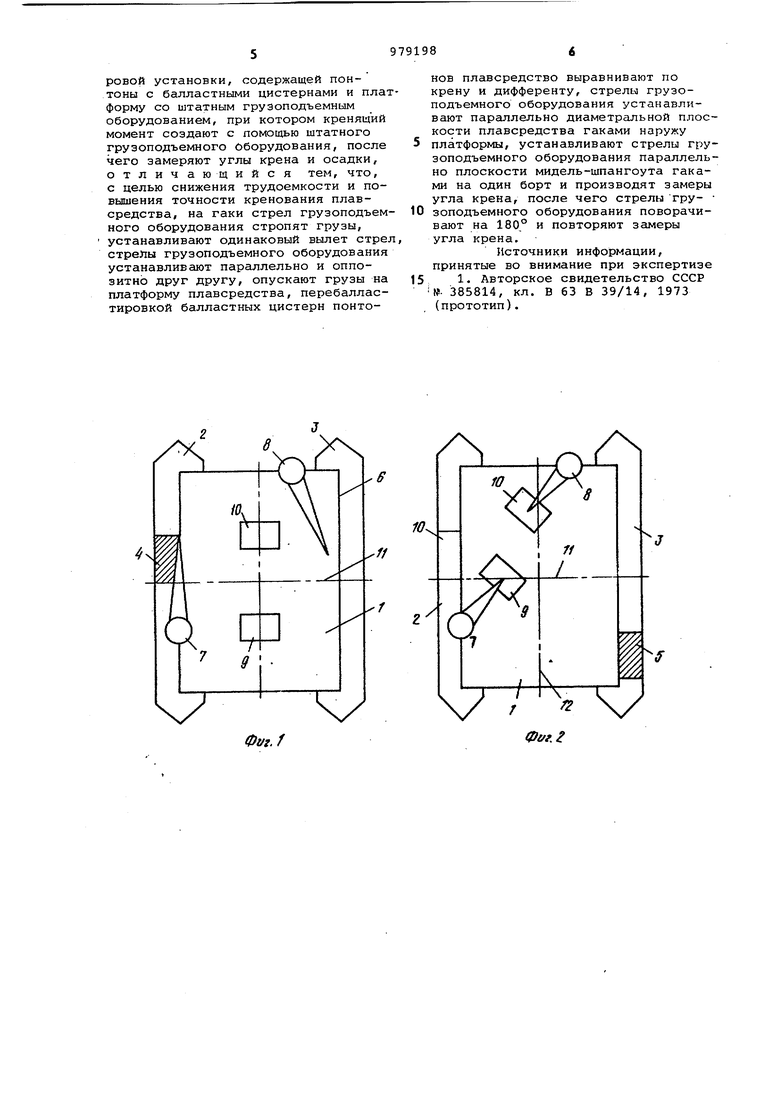
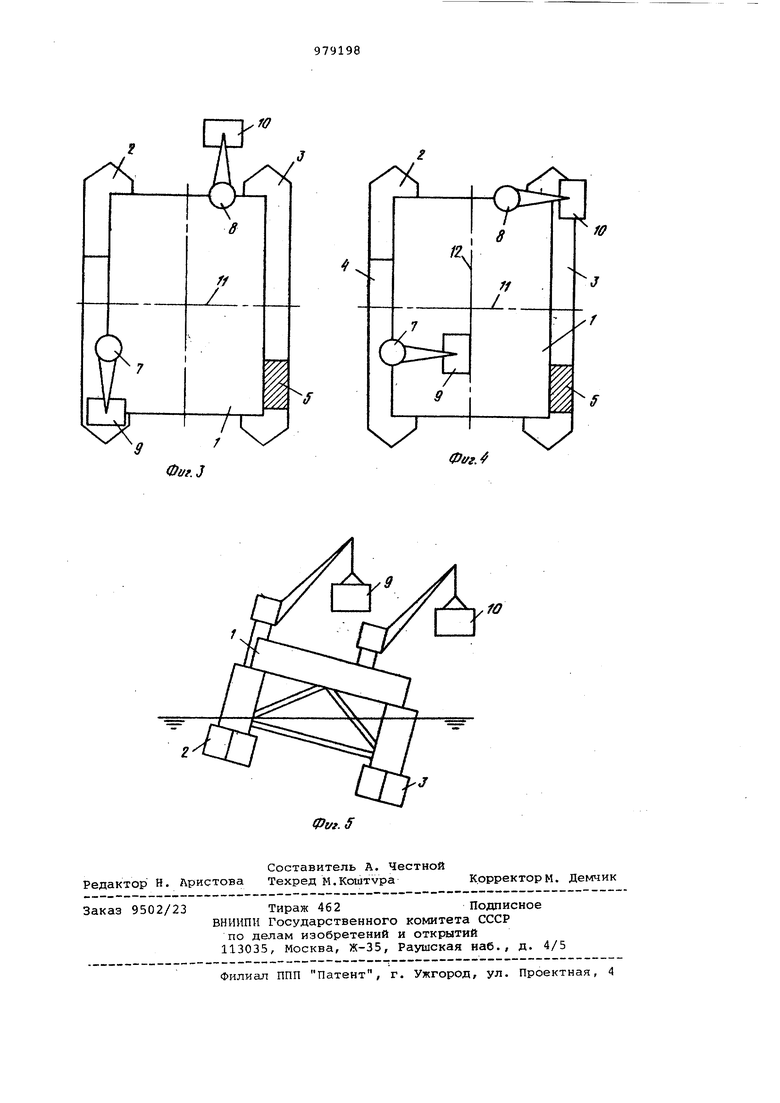
рудования поворачивают на 180° и повторяют замеры угла крена. На фиг. 1 показана плавучая полупогружная установка перед кренованием с кранами по-походномуf на фиг. 2 - плавучая полупогружная уст новка после балластировки цистерн, когда стрелы кранов с грузами установлены параллельно и противоположно друг другу; на фиг. 3 - перемеще ние стрелы кранов в положение, параллельное ДП , - исходное для кренования; на фиг. 4 - перемещение стре лы кранов с грузом на гаке на правый борт; на фиг. 5 - вид с кормы на плавучую полупогружную установку при перемещении груза на правый бор Плавучая полупогружная установка 1 содержит понтоны 2 и 3, где разме щается жидкий балласт в цистернах 4 и 5, к верхнюю платформу 6, на ко торой имеются грузовые краны 7 и 8 и установлены грузы 9 и 10. Краны 7 и 8 разноудалены от плоскости 11 мидель-шпангоута и от диаметральной плоскости 12, а грузы 9 и 10 равноудалены от них (фиг. 1). Кренование производят следующим образом. Груз 9 стропят на гак крана 7, а груз 10 - на гак крана 8. Стрелы кранов 7 и 8 на одинаковом вылете, соответствующем кренованию, устанав ливают параллельно друг другу, но в противоположном направлении. При этом угол поворота стрел относитель но диаметральной плоскости 12 выбирают так, чтобы под гаками кранов на платформе 6 было свободное место для размещения грузов 9 и 10. На фиг. 2 показано положение кранов 7 и 8, удовлетворяющее этим условиям. При этом стрелы ориентированы гаками навстречу друг другу. При другом расположении кранов 7 и 8 относител но осей 4 и 5 возможно положение, когда стрелы кранов б и 7 установлены параллельно друг другу, но гаками врозь. При этом под гаками имеется свободное местона платформе 1. Например, такой случай может быть, если краны 7 и 8 расположены не по краям платформы б, а ближе к центру. В этом случае стрелы кранов 7 и 8 также будут параллельны и про тивоположны друг другу, и это положение не противоречит порядку проведения следующих операций описываемого способа. Далее грузы 9 и 10 опускают на платформу б. При этом на полупогруж ную установку воздействует кренящий и дифферентующий моменты от перемещения грузов 9 и 10, которые создают ему крен и дифферент. Эти моменты компенсируют перекачкой жидкого балласта из цистерны 4 в понтоне 2 в цистерну 5 в лонтоне 3 или приемом дополнительного балласта в цистерну 5 или откачкой балласта из цистерны 4. Перебалластировкой создают кренящий и дифферентующий мо- менты той же величины, но противоположного знака. В результате перебалластировки установка приводится к посадке прямо и на ровный киль. Далее стрелы кранов 7 и 8 разворачивают в разный направлениях (одну - по ходу часовой стрелки, другую - против) на одинаковый угол и устанавливают па-- раллельно диаметральной плоскости 12. При этом оси остаются параллельными друг другу (фиг. 3). После этого посадка установки остается прямо и на ровный киль, поскольку эти перемещения стрел кранов создают Kt eнящие и дифферентующие моменты, равные по величине, но противоположные по знаку, которые компенсируют друг друга. Это состояние является исходным для кренования. При этом замеряют осадки и определяют водоизмещение. Затем переводят стрелы кранов, не меняя вылета, сначала на один борт (фиг. 4,5), затем на другой борт. После этого исходные операции от исходного состояния (фиг. 3) до наклонений (фиг. 4, 5) повторяют с грузом на гаке. После поворота стрел на каждый производят замеры угла крена. Предлагаемый способ позволяет производить опыт кренования плавучего сооружения, имеющего грузоподъемные краны, разноудаленные от плоскости мидель-шпангоута и диаметральной, что уменьщает трудоемкость опыта, связанную с применением традиционных методов переноса кренбалласта с борта на борт. Перекачиваемый жидкий балласт в этом случае не является крен-балластом, поэтому определение его-количества и плеча перекачки не требуется, что не влияет на погрешность конечного результата. Наклонениям установки не сопутствует дифферент, что повышает точность замеров крена и уменьшает погрешность опыта. Кренование, производимое из положения прямо и на ровный киль с одинаковыми наклонениями на оба борта, позволяет выявить имеющуюся несимметричность корпуса и экспериментально определять остойчивость сооружения. Для кренования не требуется изготовления специальных крен-контейнеров с заданным центром тяжести, а можно использовать грузы, применяемые для испытания кранов, поскольку приложение веса груза всегда будет в точке его подвеса - на гаке крана. Формула изобретения : Способ кренования плавсредства, преимущественно полупогруженной буровой установки, содержащей понтоны с балластными цистернами и платформу со штатным грузоподъемным оборудованием, при котором кренящий момент создают с помощью штатного грузоподъемного оборудования, после чего замеряют углы крена и осадки, отлич ающийся тем, что, с целью снижения трудоемкости и повышения точности кренования плавсредства, на гаки стрел грузоподъемного оборудования стропят грузы, устанавливают одинаковый вылет стрел стрелы грузоподъемного оборудования устанавливают параллельно и оппозитно друг другу, опускают грузы на платформу плавсредства, перебалластировкой балластных цистерн понтонов плавсредство выравнивают по крену и дифференту, стрелы грузоподъемного оборудования устанавливают параллельно диаметральной плоскости плавсредства гаками наружу
платформы, устанавливают стрелы грузоподъемного оборудования параллельно плоскости мидель-шпангоута гаками на один борт и производят замеры угла крена, после чего стрелы гру-
зоподъемного оборудования поворачивают на 180° и повторяют замеры угла крена.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 385814, кл. В 63 В 39/14, 1973 (прототип).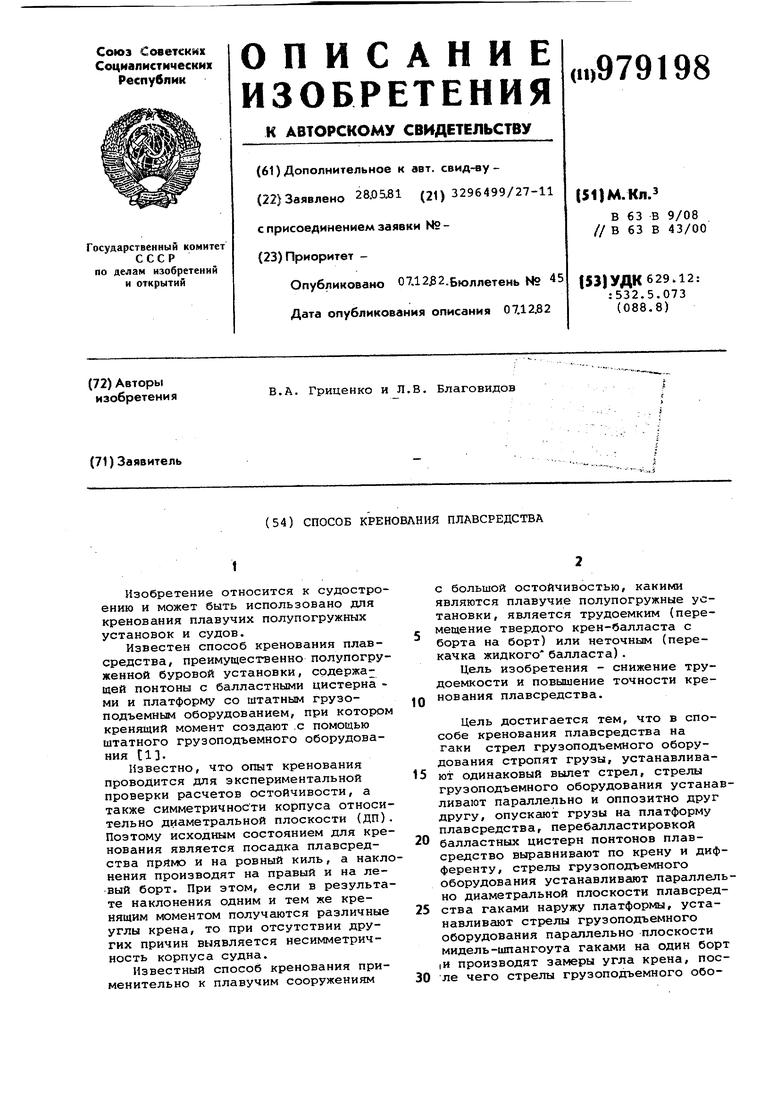
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предотвращения опрокидывания плавсредства | 1981 |
|
SU1022868A1 |
| Противокреновая балластная система полупогружного судна | 1986 |
|
SU1357308A1 |
| Способ кренования судов | 1978 |
|
SU770922A2 |
| Система компенсации крена плавучего средства | 1981 |
|
SU996264A1 |
| Система компенсации крена плавучего средства | 1980 |
|
SU887354A1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Балластная система плавучего крана | 1986 |
|
SU1414707A1 |
| Плавучий кран | 1977 |
|
SU719085A1 |
| Способ кренования судов | 1980 |
|
SU927640A1 |
| СПОСОБ РЕМОНТА ПЛАВУЧЕЙ ПОЛУПОГРУЖНОЙ БУРОВОЙ ПЛАТФОРМЫ | 2000 |
|
RU2224680C1 |
fO.
