(54) ПЛАВУЧИЙ КРАН
| название | год | авторы | номер документа |
|---|---|---|---|
| Плавучий кран | 1981 |
|
SU981194A2 |
| Плавучий кран | 1982 |
|
SU1024360A1 |
| Перегружатель гидравлический полноповоротный с дополнительным противовесом | 2019 |
|
RU2717108C1 |
| Балластная система плавучего крана | 1986 |
|
SU1414707A1 |
| Плавучий кран | 1989 |
|
SU1611783A1 |
| Способ кренования плавсредства | 1981 |
|
SU979198A1 |
| Устройство для управления перемещением груза плавучего крана | 1980 |
|
SU927732A1 |
| ПЛАВУЧИЙ ПОДЪЕМНЫЙ КРАН БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2003 |
|
RU2258026C2 |
| Ограничитель грузоподъемности плавучего стрелового крана | 1987 |
|
SU1426937A1 |
| Балластная система плавучего средства | 1983 |
|
SU1114579A1 |
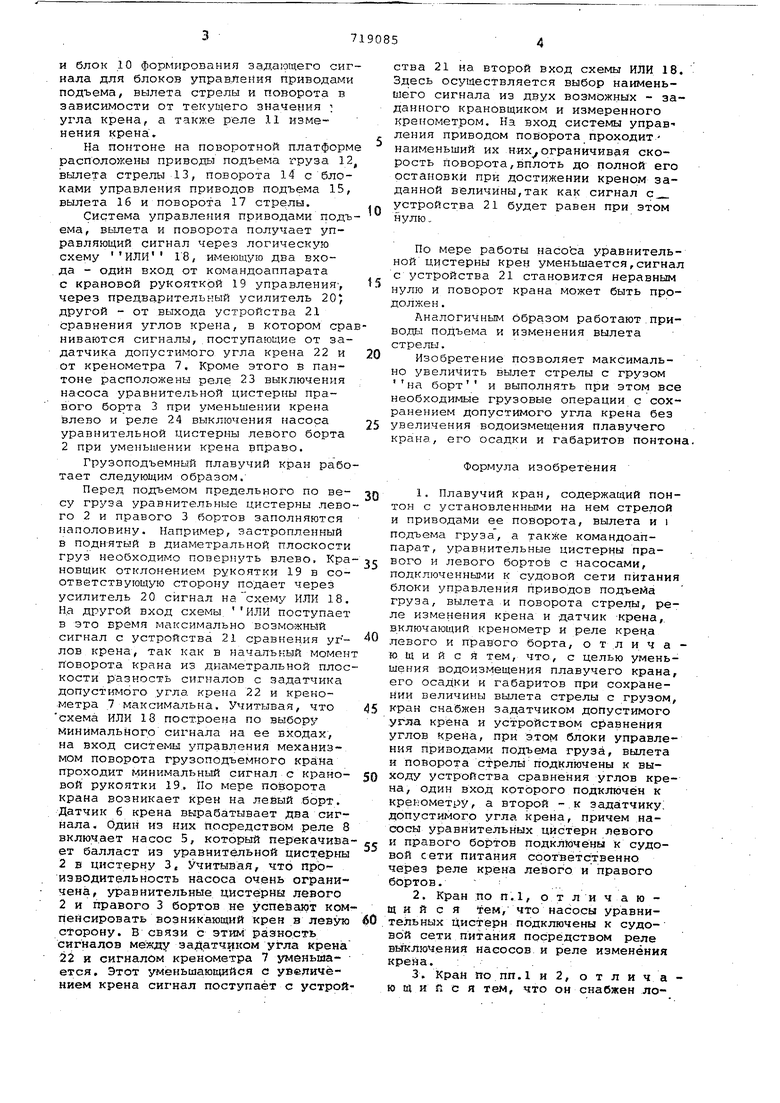
Изобретение относится к грузовым .устройствам, в частности к плавучим кранам. Известен плавучий кран, содержащи понтон с установленными на нем стрелой и приводами ее поворота, вылета и подъема груза, а также командоаппарат, уравнительные цистерны правого и левого бортов .с насосами подключенными к судовой сети питания блоки ynpaBJieHHH приводов подъема груза, вылета и поворота стрелы, реле изменения крена и датчик крена, вк.пючакиций кренометр и реле крена левого и правого борта Ц. Однако наличие тяжелего противове са увеличивает водоизмещение, осадку и габариты понтона. Цель иэрбретения - уменьшенне водоизмещения плавучего крана, его осадки и габаритов при сохранении эейичины вылета стрелы с грузом. Для этого кран снабжен зйдатчйком допустимого угла крена и устройством сравнения углов крена, при этом блоки управления приводами подъ ема груза, валета и поворота стрелы подключены к выходу устройства срав.нения углов крена, один вход которого подключен к кренометру, а второй к задатчику допустимого угла крена причем насосы уравнительных цистернлевого и правого бортов подключены к судовой сети питания соответствен-но через реле крена левого и правого бортов. . Дополнительно насосы уравнительных цистерн подключены к судовой сети питания посредством реле изменения крена и реле выключения насосов. Кроме того, кран снабжен логичерКИМ блоком ИЛИ,выходы которого подключены к устройству сравнения углов крена и командоаппарату, а выход - к входам блоков управления приводами подъема грузов, поворота и вылета стрелы. На фиг.1 изображен плавучий кран с расположенными на нем механизмбми; на фиг.2 - вид А на фиг.1; на фиг,3 схема управления крановыми механизмами. Кран состоит ИЗ понтона 1 с размещенными в нем уравнительными цистернами левого 2 и правого 3 бортов с насосами левым 4 и правым 5 и приводами насосов. В понтоне расположены также датчик б крена, состоявши из креисметра 7, реле 8 крена левого борта и реле 9 крена правого борта,
и блок 10 формирования задающего сигнала для блоков управления приводами подъема, вылета стрелы и поворота в зависимости от текущего значения ; угла крена, а также реле 11 изменения крена.
На понтоне на поворотной платформ расположены приводы подъема груза 12 ;вылета стрелы 13, поворота 14 с блоками управления приводов подъема 15, вылета 16 и поворота 17 стрелы.
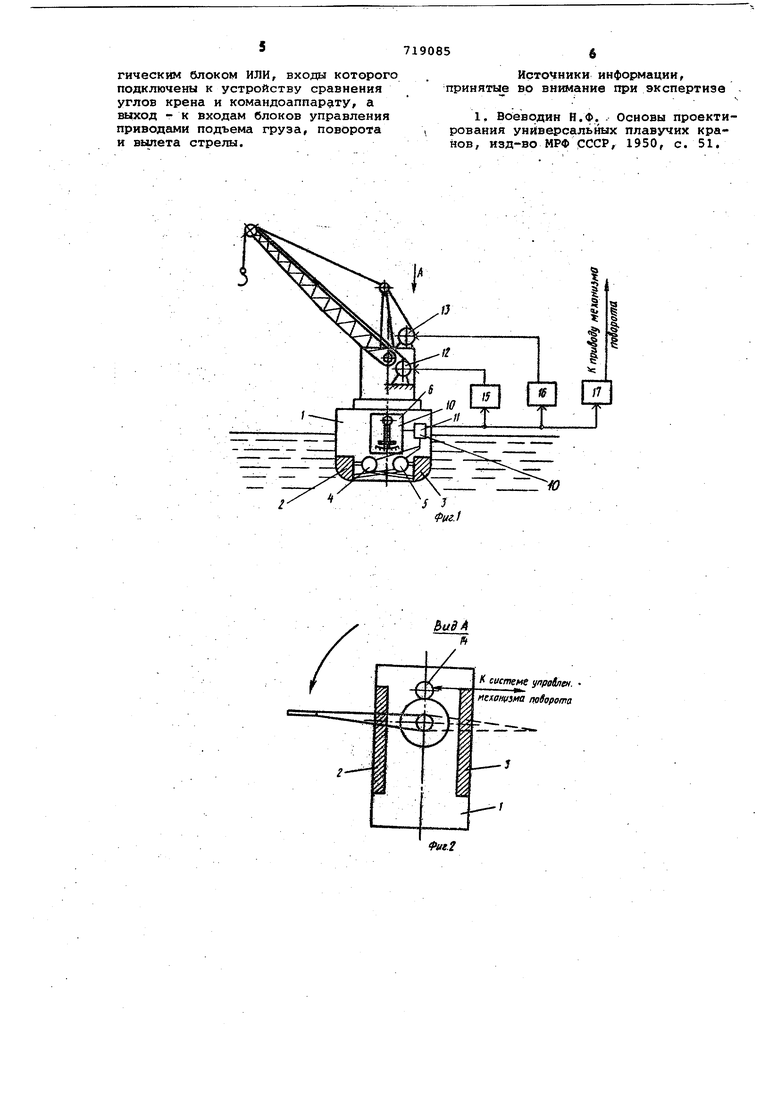
Система управления приводами подъема, вылета и поворота получает управляющий сигнал через логическую схему ИЛИ 18, имеющую два входа - один вход от командоаппарата с крановой рукояткой 19 управления-, через предварительный усилитель 20 другой - от выхода устройства 21 сравнения углов крена, в котором сра ниваются сигналы,.поступающие от задатчика допустимого угла крена 22 и от кренометра 7. Кроме этого s пантоне расположены реле 23 выключения насоса уравнительной цистерны правого борта 3 при уменьшении крена влево и реле 24 выключения насоса уравнительной цистерны левого борта 2 при уменьшении крена вправо.
Грузоподъемный плавучий кран работает следующим образом.
Перед подъемом предельного по весу груза уравнительные цистерны левого 2 и правого 3 бортов заполняются наполовину. Например, застропленный в ПОДНЯТЫЙ в диаметральной плоскости груз необходимо повернуть влево. Крановщик отклонением рукоятки 19 в соответствующую сторону подает через усилитель 20 сигнал на схему ИЛИ 18. На другой вход схемы, ИЛИ поступает в это время максимально возможный сигнал с устройства 21 сравнения углов крена, так как в начапьнЬ1й момен поворота крана из диаметральной плоскости разность сигналов с задатчика допустимого угла, крена 22 и кренометра 7 максимальна. Учитывая, что схема ИЛИ 18 построена по выбору Минимального сигнала на ее входах, на вход системы управления механизмом поворота грузоподъемного крама проходит минимальный сигнал с крановой рукоятки 19,. ilo мере поЁЕорота крана возникает крен на леёый .борт. Датчик 6 крена вырабатывает два сигнала , Один из них п.осредством .реле 8 включает насос 5, который перекачивает балласт из уравнительной цистерны 2 в цистерну 3, Учитывая, что производительность насоса очень ограничена, уравнительные цистерны левого 2 и правого 3 бортов не успевайт компенсировать возникающий крен в левую сторону, в связи с этим разно,сть сигналов между задатчиком угла крена 2i и сигналом кренометра 7 уменьиается. Этот уменьшаюпщйся с увеличением крена сигнал поступает с устройства 21 на второй вход схемы ИЛИ 18 Здесь осуществляется выбор наименьшего сигнала из двух возможных - заданного крановщиком и измеренного кренометром. На вход системы управления приводом поворота проходитнаименьший их них ограничивая скорость Поворота,вплоть до полной его остановки при достижении креном заданной величины,так как сигнал с устройства 21 будет равен при этом нулю.
По мере работы насоса уравнительной цистерны крен уменьшается,сигнал с устройства 21 становится неравным нулю и поворот крана может быть продолжен .
Аналогичным образом работают.приводы подъема и изменения вылета стрелы.
Изобретение позволяет максимально увеличить вылет стрелы с грузом на борт и выполня.ть при этом все необходимые грузовые операции с сохранением допустимого угла крена без увеличения водоизмещения плавучего крана, его осадки и габаритов понтон
Формула изобретения
и поворота стгрель) подключены к выходу устройства сравнения углов крена, один вход которого подключён к крекометру, а второй -.к задатчику; допустимого угла крена, причем насосы уравнительных цистерн левого и правого бортов подклМчены К судовой сети питания соответственно через реле крена лейого и правого бортов. :
Источники информации, принятые во внимание при экспертизе
- .
1, Воеводин Н.Ф. . Основы проектирования универсальных плавучих кранов, изд-во МРФ СССР, 1950, с. 51,
1 системе упрощен. иехан(1зма поворота
Фие.2
Lbjl-« Tl-rnrtJ I Ш.Л
j«A7j р;%
тек
/
20
ТТИг- J nfh J ftfeJJL-Jjr- - -
29
Ы
Судовая сеть 5806; 50г
CydoSaa сеть
nr
5Jt
-%
/j) (/
