; Изобретение относится к автоматке и вычислительной технике и може быть использовано для разбраковки Iизделий, выдачи заготовок, инструм :та и комплектующих изделий в техно логических процессах, а также при автоматизации погрузочно-разгрузоч ных и транспортных работ на различных складах.
Цель изобретения - расширение функциональных возможностей путем обеспечения доставки объектов из ..нескольких пунктов отправления в нсколько пунктов назначения о
На фиг о 1 приведена схема части устройства, размещенного в районе пунктов отправки объектов; на фиг. схема части устройстваj размещенно непосредственно на транспортном средстве.
Устройство содержит в каждом пункте отправления датчик 1. наличия объектов, индикатор 2 объектов в пункте отправления, элемент ШШ 3, индикатор 5 4 наличия ОбъектовS датчик 5 текущего адреса, датчик 6 наличия объектов в пунктах пребывания, датчик 7 наличия объектов в промежуточных пункс номерами i 2, К, так как на индикатор 4 поступает высокий потенциал от любого датчика с порядковым номе ром от 2 до К через элемент ШШ 3, В любом пункте отправления объекты располагаются в порядке очередности на отправку, последовательно занимая позиции от АИ до AiL, и при удалении объекта с позиции Ai1 синхронно смещаются на одну позицию в направлении к позиции Ail На транспортном средстве, при погрузке, объекты последовательно занимают по зиции от Б1 до. БМ, причем поступление очередного объекта в позицию Б1 сдвигает ранее погруженные объекты на единицу в сторону позиции БМ, а при разгрузке с позиции Б1 объекты сдвигаются На единицу от позиции БМ к позиции Б15 тогда в любом пункте отправления при наличии хотя бы одного объекта позиции Ail этого пункта оказывается занятой, и она
тах, датчик 8 полной загрузки. Датчик30 ;
9 параметров объектов, триггер 10, дешифратор 11, блок 12 сравнения, элемент ИЖ 13, элементы 14-17 запрета, элемент ИЛИ 18, генератор 19 тактовых импульсов, элементы И 20-22 формирователи 23 и 24 прямоугольных имтгульсрв, распределители 25-28 импульсов, исполнительный механизм 29 , перемещения,, исполнительный механизм 30 погрузки-разгрузки.
Устройство для управления транспортным средством работает следую щин образом.
В момент включения в пунктах А j отправления объектов О, число которых i 1, KS может находиться в разной комбинации по j, где j 1 Ь, объектов О, предназначенных для отправки в пункты назна-чения Б, число которых g, где g 1, И. Датчики 1 пунктов отправления, имеющих для отправки объекты О, на выходах имеют высокие (единичные) потенциалы, а датчики 1 пунктов отправления Ai, не имеющих для отправки объекта, на выходах имеют низкие (нулевые) потенциалы, тогда индикаторы 2
35
45
50
55
тов в данном пункте, равном нулю, а на транспортном средстве аналогична его позиция В оказывается занятой, если хотя бы один объект уже погружен на транспортное средство.
При полной загрузке транспортног средства, Тое когда все его позиции заняты, объект, находящийся в позиции БМ, контактирует с датчиком 8, что приводит к появлению высокого потенциала на его выходе, а при неполной загрузке транспортного средства на выходе датчика 8 имеется ни кий (нулевой) потенциал, но если транспортное средство загружено хот бы одним объектом, то этот объект, будучи в его позиции Б1, контактиру ет с датчиком 9, Последний при отсутствии объектов на транспортном средстве имеет обнуленные все свои выходы, а при наличии объектов генерирует код параметра контактирующег с датчиком 9 объекта, зафиксированного в позиции Б1 транспортного сред ства. Код с выходов датчика 9 преобразуется- дешифратором 11 в код адреса пункта назначения объекта, контактирующего с датчиком 9 Если в мо
пунктов отправления Ai . сигнализируют о наличии в этих пунктах объектов, а индикатор 4 может сигнализировать о наличии объектов в пунктах отправления Ai только при условии, имеются в пунктах
0
5
0
5
с номерами i 2, К, так как на индикатор 4 поступает высокий потенциал от любого датчика с порядковым номером от 2 до К через элемент ШШ 3, . В любом пункте отправления объекты располагаются в порядке очередности на отправку, последовательно занимая позиции от АИ до AiL, и при удалении объекта с позиции Ai1 синхронно смещаются на одну позицию в направлении к позиции Ail На транспортном средстве, при погрузке, объекты последовательно занимают позиции от Б1 до. БМ, причем поступление очередного объекта в позицию Б1 сдвигает ранее погруженные объекты на единицу в сторону позиции БМ, а при разгрузке с позиции Б1 объекты сдвигаются На единицу от позиции БМ к позиции Б15 тогда в любом пункте отправления при наличии хотя бы одного объекта позиции Ail этого пункта оказывается занятой, и она
0 ;
5
5
0
5
тов в данном пункте, равном нулю, а на транспортном средстве аналогичная его позиция В оказывается занятой, если хотя бы один объект уже погружен на транспортное средство.
При полной загрузке транспортного средства, Тое когда все его позиции заняты, объект, находящийся в позиции БМ, контактирует с датчиком 8, что приводит к появлению высокого потенциала на его выходе, а при неполной загрузке транспортного средства на выходе датчика 8 имеется низкий (нулевой) потенциал, но если транспортное средство загружено хотя бы одним объектом, то этот объект, будучи в его позиции Б1, контактирует с датчиком 9, Последний при отсутствии объектов на транспортном средстве имеет обнуленные все свои выходы, а при наличии объектов генерирует код параметра контактирующего с датчиком 9 объекта, зафиксированного в позиции Б1 транспортного средства. Код с выходов датчика 9 преобразуется- дешифратором 11 в код адреса пункта назначения объекта, контактирующего с датчиком 9 Если в мо3u
мент включения устройства транспортное средство находится за пределами области пунктов отправления А, то при наличии на нем транспортируемых объектов код адреса объекта, находящегося в позиции Big сравнивается блоком 12 сравнения с кодом текущего адреса транспортного средства, который поступает с выходов датчика 5, Если код последнего меньше кода с выходов дешифратора 11, на его выходе, соединенном с входом элемента 16 запрета, устанавливается высокий потенциал, а два других его выхода оказываются под низки потенциалом, высоким потенциалом с выхода открытого элемента 16 запрета через элемент ИЛИ 18 открывается элемент И 20,
Импульсы с.выхода генератора 1 9 через элемент И 20 и распределитель 25 поступают на входы механизма 29, побуждая последний перемещать транспортное средство в сторону удаления от района пунктов отправки А объектов, Тово в сторону пункта с адресом, код которого поступил с выходов дешифратора 11 о Если код датчика 5 больше кода с выходом дешифратора 11, то на его выходе, соединенном с входом элемента И 21, устанавливается высокий потенциал, на двух других выходах - низкие, при этом элемент И 20 оказывается закрытым, а элемент И 21 открытым, импульсы с выхода генератора 19 через элемент И 21 и распределитель 26 поступают на входы механизма 29, побуждая его перемещать транспортное средство в сторону пунктов А, . в сторону пункта Б, код а.дреса которого соответствует коду адреса объекта в позиции Б1. Если же транспортное средство оказалось в разгруженном состоянии в момент включения, то оно под действием 1-1мпульсов с выхода генератора 19 через элемент И 21 и распределитель 26 направляется в пункт отправления А 1 По прибытии в пунк А 1 датчик 6 контактирует с индикатором 2 пункта А 1, а датчик 1-е индика1Ором 4 Лри наличии в пункте А 1 объектов датчик 1 пункта А 1 через индикатор 2 пункта А 1 воздействует на датчик 6, высоким потенци лом с выхода датчика 6 триггер 10 удерживается в нулевом состоянии, а элемент 14 закрьтается
91
10
15
20
25
30
кроме того, через открытый элемент 15 закрываются элементы 16 и 17 запрета, и высокий потенциал на вы- ходе элемента 15 запрета своим пе- р.едним фронтом в формирователе 23 формирует короткий импульс, который, проходя через распределитель 27, побзтасдает механизм 30 к перемещению объекта из позиции А 1 в позицию Б1. Если в пункте А1 число объектов пре- вьппает число М (число мест на тран- спортном средстве), то объектами из пункта А1 транспортное средство за™ ,гружается полностью, когда объект в позиции БМ переводит датчик 8 в состояние, при котором на его выходе устанавливается высокий потенциал, высоким потенциалом с вьсхода датчика 8 элемент 15 запрета закрывается, а элементы 16 н 17 открываются, к по сигналу с выхода блока сравнения через элементы 16, 18 и 20, а также распределитель 25 транспортное сред™ ство отправляется в пункт назначения Бq объекта, зафиксированного в позиции Б1, По прибытии в пункт Bq адресования объекта, зафиксированного в позиции Б1, на выходе блока 12 сравнения вырабатывается сигнал равенства кодов заданного и текущего адресов, этрт сигнал открывает элемент И 22 и высокий потенциал с выходов датчика 5 через элемент ИЛИ 13, формирователь 24 и распределитель 28 побуждает механизм к перемещению объектов, зафиксированных в позициях Б2з 0.0, БМ, в сторону позиции Б1, о.., Б(Ы-1) соответственно, а с позиции В1 разгружается в пункте назначения. Но в позиции Bt теперь оказывается новый объект, тогда по алгоритму транспортное средство устремляется в новый пункт назначения Bq, где производится выгрузка очередного объекта, и так до полной разгрузки транспортного сред7 ства, после чего оно возвращается р исходное положение, т.,е. в пункт А1.
Если в пункте А1 число объектов не превышает числа мест на транспортном средстве, то после завершения погрузки всех оказавшихся в в пункте А1 объектов на выходе дат чика 6 имеется нулевой потенциал, 55 а элементы 16 и 17 открыты и транспортное средство устремляется по адресу, определяемому параметрами объекта в позиции Б1„ В ближайшем
30
35
40
45
50
514291
пункте, имеющем в наличии объекты, - iпредназначенные для отправки, оста- }навливается, так как его индикатор :2 через датчик 6 и элемент 15 запрета закрывает элементы 16 и 17, а передним фронтом высокого потенциала с выхода элемента 15 через формирователь 23 и распределитель 27 механизм 30 приводится в деист- д вие, направленное на перемещение объекта из позиции Ait в позицию Б1, По достижении момента выборки из пункта Ai всех объектов на вы- ходе датчика 1 пункта Ai устанавлива- -j ется низкий потенциал, тогда и на выходе датчика 6 имеется низкий потенциал, а транспортное средство импульсами с выхода генератора 19 через открытый элемент И 20 и рас- у пределитель 25 перемещается в сторону возрастания кодов его текущего адреса, в пункте А (.i+1) производится догрузка и т.До Но по достия :ении числа объектов, погруженных на тран- 35 спортное средство, допустимому числу М, датчик 8 закрывает элемент
15запрета, при этом элемент 16 оказывается открытым, а транспортное средство устремляется в пункт Bq соответствующий адресу для объекта
в позиции Б1, причем состояния датчиков 1 и индикаторов 2 по пути следования транспортным средством не врспринимаются Если же в пункте А1 объектов в наличии нет, но они имеются в пунктах Ai с младшими приоритетами, то их датчики 1 через элементы ИЛИ 3 воздействуют на индикатор 45 который через датчик 7 и открытый элемент 14 переводит триг гер 10 в единичное состояние, а высоким потенциалом с единичного выхода триггера 10 через элементы 17, 18 и 20, а также распределитель 25 механизм 29 отправляет транспорт- ное средство из пункта А1 Транспортное средство остановится в том пункте Ai , в котором имеются в наличии объекты, так как его датчик 1 через индикатор 2 и датчик 6 переводит 50 элемент 14 в. закрытое состояние, а триггер 10 в нулевое состояние и закрывает через элемент 15 элементы
16и 17, после погрузки В пункте
Ai транспортное средство вьшолняет 55 операции согласно описанного алго ритма и возвращается в пункт А1j где находится в ждущем режиме до появле40
д j 5
n
0
5
0
306
ния объекта О в любом из пунктов А1,
в о fi J, Al , о о , АК а
Формула изобретения
Устройство для управления транспортным средством, содержащее по числу пунктов отправления объектов датчики наличия объектов, элементы ИЛИ, датчик текущего адреса, датчик параметров объектов, блок сравнения, триггер, генератор тактовых импульсов, .первый элемент И, первый вход которого соединен с выходом первого элемента ИЖ, второй вход соединен с выходом генератора тактовых импульсов., второй элемент И, третий зле- мент И,, первый вход которого соединен с выходом второго элемента ИЛИ, первый распределитель импульсов, вход которого соединен с вьпсодом первого элемента И, и исполнительный механизм перемещения, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечакия доставки объектов из нескольких пунктон отправления в несколько пунктов назначения:, в него введены датчик наличия объектов в пункте прибывания, датчик наличия объектов в промежуточных пунктахj датчик полной загрузки, дешифратор, элементы запрета, формирователи прямоугольных импульсов,, второй, третий и четвертый распределители импульсов, исполнительный механизм погрузки-разгрузки, первый вход элемента ИЛИ в каждом пункте отправления, кроме начального и конечного,, соединен с выходом датчика наличия объектов соответствующего пункта отправления, второй вход - с выходом элемента ИЛИ последующего пункта отпр авления, второй вход элемента ИЛИ предпоследнег.о пункта отправления соединен с выходом датчика личия объектов конечного пункта от-, правления, выход элемента ИЛИ второго пункта отправления является выходом признака наличия объектов устройства; выход датчика наличия объектов в пункте пребывания соединен с нулевьк входом триггера, управляюпц-ш вход первого элемента запрета соединен с выходом датчика наличия объектов в пункте пребывания5 информацион- ньй вход соединен с выводом датчика наличия объектов в промежуточных пунктах, выход первог о элемента запре
,i /liL
fli РП
тЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортным средством | 1987 |
|
SU1430969A1 |
| Устройство для управления транспортным средством | 1987 |
|
SU1469499A1 |
| Устройство для управления автотран-СпОРТНыМ КОМплЕКСОМ | 1978 |
|
SU807321A1 |
| Система телемеханики для циклического опроса рассредоточенных объектов | 1977 |
|
SU691912A1 |
| Устройство телеконтроля состояния стрелок и сигналов | 1986 |
|
SU1348252A1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Система для управления экскаваторно-автомобильным комплексом | 1989 |
|
SU1647598A1 |
| Способ для циклического опроса рассредоточенных объектов | 1974 |
|
SU519753A1 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| Устройство для контроля и сигнализации | 1990 |
|
SU1795494A1 |
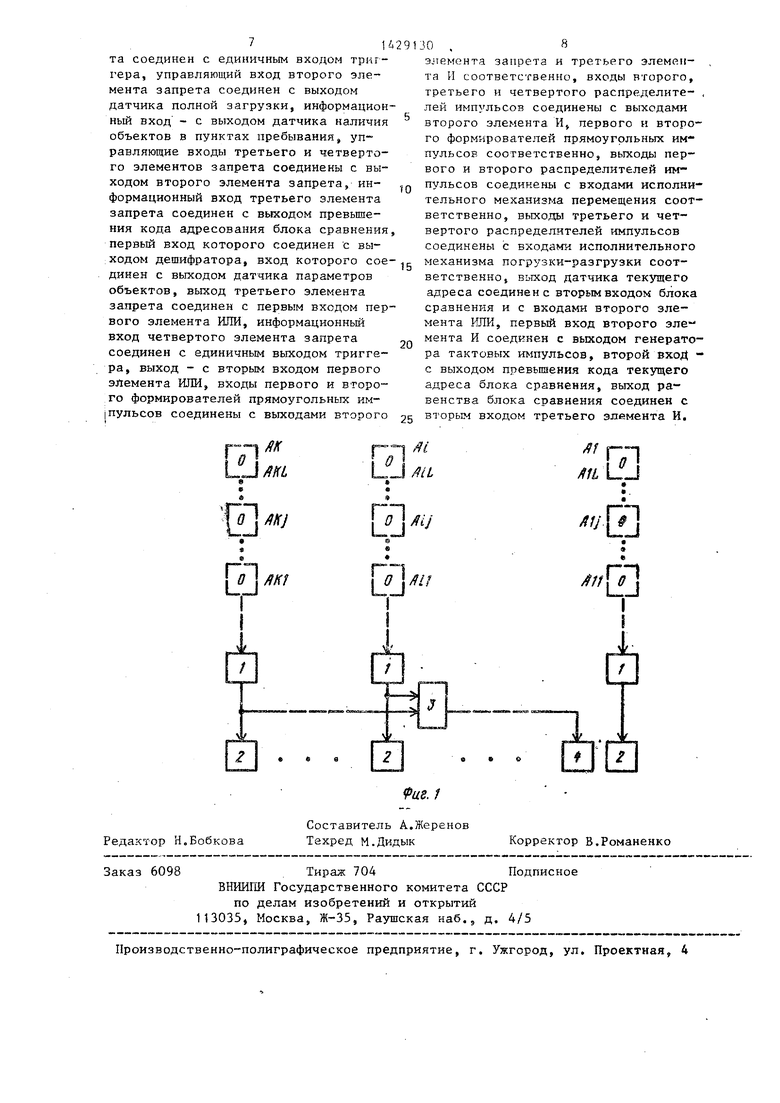
Изобретение относится к автоматике и вычислительной технике и может использоваться при автоматизации погрузочно-разгрузочных работ на складах. Целью изобретения является расширение функциональных возможностей за счет обеспечения доставки объектов из нескольких пунктов от- .,правления в несколько пунктов назначения. Устройство содержит в каждом пункте отправления датчик наличия объектов, индикатор объектов в пунк- ге отправления, элемент ИЛИ 3, индикатор 4 наличия объектов, датчик 5 текущего адреса, датчик 6 наличия объектов в пунктах пребьшания, датчик 7 наличия объектов в промежуточных пунктах, датчик 8 полной загрузки, датчик 9 параметров объектов, триггер 10, депшфратор 11, блок 12 сравнения, элемент ИЛИ 13, элементы 14-17 запрета, элемент ИЛИ 18, генератор 19 тактовых импульсов, элементы И 20-22, формирователи 23, 24 прямоугольных импульсовj распределители 25-28 импульсов, исполнительный механизм 29 перемещения, исполнительный механизм 30 погрузки-разгрузки. 2 ил. сл с
w
ULJ
И
Ж
I
| Авторское свидетельство СССР, № 1292011, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для программного управления | 1984 |
|
SU1182488A1 |
| ; | |||
