1
Изобретение относится к автоматике и вычислительной технике, в частности к автоматическим транспортным средствам, и может быть использовано в гибких автоматических производствах для автоматической доставки заготовок к технологическому оборудованию и наоборот.
Цель изобретения - повьшение производительности транспортного средства за счет автоматизации распознавания образцов транспортируемых объектов, их адресования, загрузки транспортного средства в пункт отправления, разгрузки в пунктах назначения, возврата в пункт отправления и централизованного задания маршрута следования .
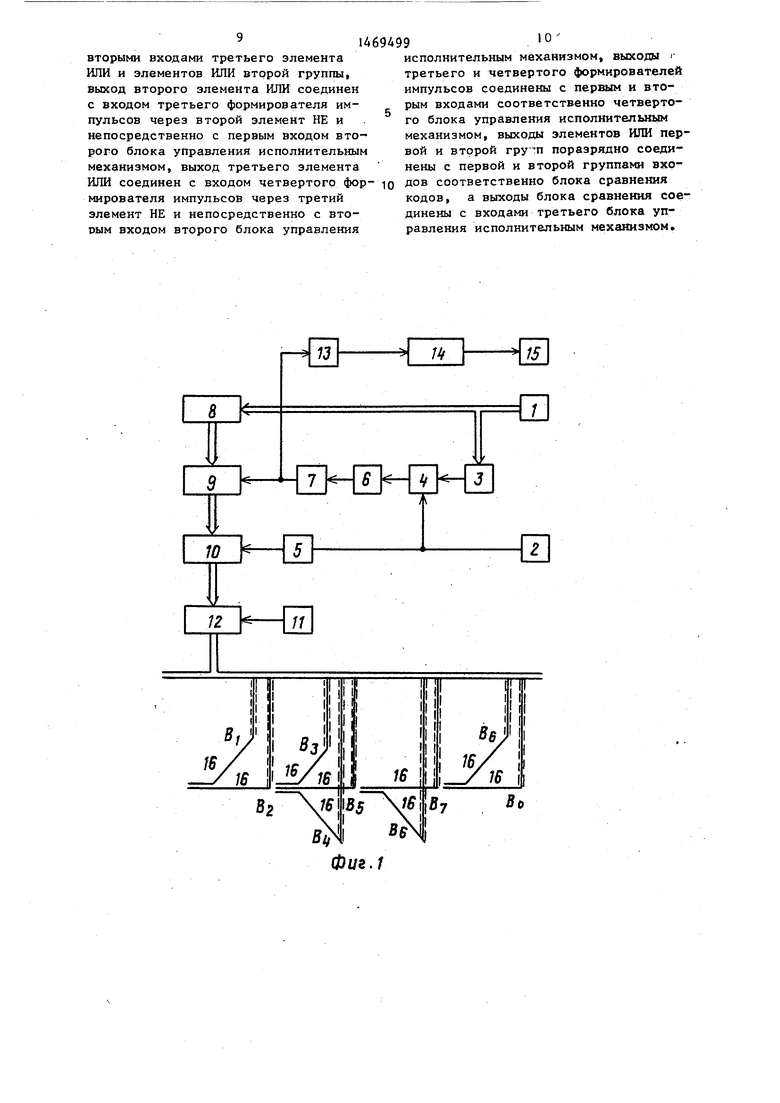
На фиг.1 приведена схема части устройства, размещенного на стационарных пунктах и участках области позиционирования транспортного средс т- ва; на фиг.2 - схема части устройства, размещенной непосредственно на транспортном средстве.
Устройство содержит (фиг.1) датчик 1 параметров объектов транспортирования установленных на перегрузоч- ньш стол пункта их отравления, датчик 2 наличия транспортного средства в пункте отправления транспортируемых объектов, первый элемент ИЛИ 3,
О СО 4:: СО
первый элемент И А, первый формирователь 5 импульсов, второй формирователь 6 импульсов, первый элемент 7 задержки, преобразователь код-код 8 (шифратор, дешифратор), первую группу элементов И 9, регистр Ю оперативной памяти, генератор 11 сигналов, блок 12 коммутации, второй элемент 13 задержки, первый блок 14 управле- ния исполнительным механизмом, первый исполнительный механизм 15 (исполнительный механизм перегрузки объекта транспортирования с перегрузочного стола пункта отправления на транспортное средство), секции 16 направляющего кабеля, уложенные по пути следования транспортного средства от одного пункта возможной его остановки до другого и соединенные с соответствующими выходами блока 12 коммутации (фиг.2), датчик 7 наличия объекта транспортирования на транспортном средстве, первый элемент НЕ IS первый датчик 19 слеже- ния за трассой при движении транспортного средства от пункта отправления, второй датчик 10 слежения за трассой при движении транспортного средства от пункта отправления, тре- тий датчик слежения за трассой следования при движении транспортного cpe;jCTBa к пункту отправления, четвертый датчик 22 слежения за трассой при движении транспортного средства к пункту отправления объектов транспортирования, первый преобразователь аналог-код 23, соединенный входом с выходом датчика 19, второй преобразователь аналог-код 24, соединенный входом с выходом датчика 20, третий преобразователь аналог-код 25, соединенный входом с-выходом датчика 21, четвертьш-преобразователь аналог-код 26, соединенный входом с выходом дат чика 22, вторую, третью группы элементов И 27 и 28, четвертую группу элементов И 29, пятую группу элементов И 30, второй элемент ИЛИ 31, тре тий элемент ИЛИ 32, второй элемент НЕ 33, третий элемент НЕ 34, третий формирователь 35 импульсов, четвертый формирователь 36 переднего фронта импульсов, первую группу элементов ИЛИ 37, вторую группу элементов ИЛИ 38, блок 39 сравнения кодов, второй блок 40 управления исполни- тельным механизмом, третий блок 41 управления исполнительным механизмом, четвертый блок 42 управления исполнительным механизмом, второй исполнительный механизм 43 (исполнительный механизм перемещения транспортного средства вдоль трассы в одну или другую сторону), третий исполнительный механизм 44 (исполнительный механизм рулевого устройства) и четвертый исполнительный механизм 45 (исполнительный механизм перегрузки объектов транспортирования с транспортного средства на перегрузочные столы пунктов назначения).
Устройство работает следукяцим образом.
В исходном состоянии транспортное средство зафиксировано в пункте А отправления объектов транспортирования, перегрузочный стол пункта А свободен, а регистр 10 обнулен. При поступлении на перегрузочный стол пункта А объекта транспортирования срабатывает датчик 1. При этом на его выходах генерируется код, пропорциональный значению контролируемого параметра объекта, зафиксированного на перегрузочном столе пункта А, а на выходах преобразователя код-код 8 - код адреса Пункта В1 назначения данного объекта.
На выходе элемента ИЛИ 3 устанавливается высокий потенциал, который поступает на второй вход элемента И 4, а так как на выходе датчика 2 и на первом входе элемента И 4 - высокий потенциал, то и выход элемента И 4 оказывается под высоким потенциалом.
По переднему фронту импульса высокого потенциала формирователь 6 генерирует короткий импульс высокого потенциала, который с задержкой Т во времени поступает через элемент 7 задержки на первые входы всех элементов И 9 группы, что обеспечивает передачу содержимого выходов преобразователя код-код 8 через элемент И 9 на установочные входы регистра 10 оперативной памяти.
. Зафиксированный в регистре 10 код адреса с выходов.регистра 10 поступает на входы управления блока 12 коммутации, на сигнальный вход которого поступают с выхода генератора 11 сигналы заданной формы, амплитуды и частоты .или длительности. Блок 12 коммутации в соответствии с кодом адреса пункта назначения В, коммутирует выход генератора 11 с соответствующими секциями направляющего кабеля 16 так, что секции на трассе перемещения транспортного средства из пункта А в пункт В оказываются соединенными с выходом генератора 1I, тогда как другие секции оказьшаются отсоединенными от выхода генератора 11.
С выхода формирователя 6 с задерж- -JQ но так, что датчики 21 и 22 еще накой , обусловленной последовательным прохождением импульса через элементы 7 и 13 задержки, импульс формирователя 6 поступает на вход блока
ходятся в зоне влияния на их выходы со стороны кабеля 16.
С обнулением выхода элемента ИЛИ 31 на выходе элемента НЕ 33 устанав25
30
3S
14 управления исполнительным механиз- 15 ливается высокий потенциал, передним
фронтом которого через формирователь 35 и блок 42 приводится в действие исполнительный механизм 45, и объект транспортирования перегружается с платформы транспортного средства на перегрузочный стол пункта назначения В. Однако при этом выход датчика 17 обнуляется, а на выходе элемента НЕ 18 устанавливается высокий потенциал, которым открываются элементы И 29 и 30, и информация с выходов датчиков 2 и 22 через преобразователи аналог-код 25 и 26 и элементы И 29 и 30 поступает на вход элемента ИЛИ 32, высоким потенциалом с выхода которого через блок 40 управления исполнительным механизмом .включает механизм 43. Последний перемещает транспортное средство к пункту А отправления, а с выходов элементов И 29 и 30, через элементы ИЛИ 37 и 38, .блок 39 сравнения кодов и блок 41 управления механизмом 44 управляет рулевым устройством, обеспечивая слежение за обозначенной кабелем 16 трассой.
По прибытии транспортного средства в пункт А отправления в датчиках 21 и 22 преобразователей 25 и 26, элементов И 29 и 30 и ИЛИ 32 устанавливаются нулевые потенциалы, транспортное средство затормаживается, а передним фронтом импульса высокого потенциала с выхода элемента НЕ 33 через блок 42 управления исполнительный механизм 45 устанавливается в исходное состояние.
По прибытии в пункт отправления А транспортное средство контактирует с датчиком 2, передний фронт высокого потенциала с выхода которого обнуляет через формирователь 5 регистр 10 оперативной памяти, а затем, при наличии нового, объек та транспортиромом 15, который сдвигает объект с перегрузочного стола пункта А на плат- .форму транспортного средства. При наличии объекта на платформе транспортного средства выход датчика 17 оказы- 2о вается под высоким потенциалом сигнала в кабеле указателя 16 трассы; выходы датчиков 19 и 20 генерируют сигналы, обратно пропорциональные квад- .ратам их удаления от кабеля 16. С выходов датчиков 19 и 20 сигналы пос- .тупают на входы преобразователей ана- лог-код 23 и 24, работа которых синхронизирована (цепи синхронизации не показаны), на выходах которых в параллельном коде генерируется информация об уровнях сигналов на выходах .датчиков 19 и 20. Последняя через от- 1крытые .элементы И 27 и 28 (их первые входы соединены с выходом датчика 17 и находятся под высокими потен- . циалами) поступает на входь элемента ИЛИ 31 и элементов ИЛИ 37 и 38 групп. На выходе элемента НЕ 18 в э-то время низкий потенциал, элементы И 29 и 30 заперты.
Сигналом с выхода элемента ИЛИ 31 через блок 40 управления исполнительным механизмом включается исполни-v тельный механизм 43, который перемещает транспортное средство от пункта А к пункту Б;, а сигналами с выходов элементов ИЛИ 37 и 38 в блоке 39 сравнения кодов вырабатывается ошиб-. ка рассогласования, которая через блок 41 приводит в действие исполнительный механизм 44 рулевого устройства, в сторону, обеспечивающую уменьшение ошибки рассогласования,, чем обеспечивается слежение за трас40
45
50
сой перемещения транспортного средства, обозначенной кабелем 16.
По достижении конца направляющего кабеля 16, т.е. ко гда амплитуды сиг55
налов на выходах датчиков 19 и 20 упадут до нуля или до значения, не превышающего их порого чувствительности, на выходах преобразователей 23 и 24 и элементов И 27 и ИЖ 31 устанавливаются нулевые потенциалы, а исполнительный механизм 43 через блок 40 управления затормаживается,
ходятся в зоне влияния на их выходы со стороны кабеля 16.
С обнулением выхода элемента ИЛИ 31 на выходе элемента НЕ 33 устанав25
о
30
о
3S
о
о
40
45
50
55
ания на перегрузочном столе пункта процесс функционирования повторяется . .При отсутствии в пункте А объектов транспортирования транспортное средство зафиксировано в пункте А в дущем режиме и по мере поступления бъектов транспортирования осущестляет их перемещения из пункта А в Пункт назначения В, определяемые контролируемыми с помощью датчика 1 параметрами. ормулаизобр е тения
Устройство для управления транспортным средством, содержащее в пункте отправления датчик параметров о.бъ- ектов транспортирования, датчик наличия транспортного средства, шервый элемент ИЛИ, первый элемент. И, первый и второй элементы задержки, преобразователь код-код, пять групп элементов И, регистр оперативной памяти, генератор сигналов, четыре блока управления исполнительным механизмом и первый исполнительный механизм, . соединен ный входом с выходом первого блока управления исполнительным механизмом, датчик наличия объектов на транспортном средстве, первый, второй, третий и четвертый датчики слежения за трассой, две группы элементов ИЛИ, второй испольштельньш механизм, соединенный входами с выходами второго, блока управления исполнительным механизмом, третий исполнительный механизм, соединенный входами с выходами третьего блока управления исполнительным механизмом, и четвертый исполнительный механизм, соединенный входами с выходами: четвертого блока управления исполнительным механизмом, отличающееся тем, что, с целью повьшения производительности транспортного средства, в него введены первый, второй и третий эле- менты НЕ, первьш, второй, третий и четвертый формирователи импульсов, первый, второй, третий и четвертый преобразователи аналог-код и блок сравнения кодов, причем первый датчик выходами соединен с входами первого элемента ИЛИ и поразрядно с входами преобразователя код-код, второй датчик выходом соединен с первым вхо- дом первого элемента И, второй вход которого соединен с выходом первого элемента ИЛИ, и с входом первого фор0
5
0
25
30
35
40
45
50
55
мирователя импульсов, выход первого элемента И соединен с входом второго формирователя импульсов, выход которого соединен с .входом первого элемента задержки, выход первогб элемента задержки соединен с первыми входами элементов И первой группы и с входом второго элемента задержки, выходы преобразователя код-код соединены поразрядно с вторыми входами элементов И первой группы, выходы которых поразрядно соединены с установочными входами регистра оперативной памяти, вход,обнуления которого соединен с выходом первого формирователя импульсов, выходы регистра оперативной памяти поразрядно соединены с у прав- ляющими входами блока коммутации, сигнальный вход которого соединен с выходом генератора импульсов, вьпсод второго элемента задержки соединен с входом первого блока управления исполнительным механизмом, направляющий кабель расчленен на секции, каждая из которых уложена по трассе следования транспортного средства только между двумя соседними пунктами позиционирования транспортного средства и соединена с соответствующим выходом блока коммутации, вькод третьего датчика соединен с первыми входами элементов И второй и третьей групп непосредственно и с первыми входами элементов И четвертой и пятой групп через первый элемент НЕ, выходы четвертого, пятого, шестого и седьмого датчиков соединены с входами первого, второго, третьего и четвертого преобразователей аналог- код соответственно, выходы первого, второго, третьего и четвертого преобразователей аналог-код поразрядно соединены с вторыми входами элементов И вторых, . третьих, четвертых и пятых групп соответственно, выходы элементов И второй группы поразрядно соединены с первыми входами второго элемента ИЛИ и элементов ШИ второй группы, вькоды элементов И третьей группы поразрядно соединены с вторы- ми входами второго элемента ШШ и с первыми входами элементов ИЛИ второй группы, выходы элементов И четвертой -группы поразрядно соединены с вторыми входами элементов ИЛИ второй группы и . с первыми входами третьего элемента ИЛИ, выходы шестых элементов И пятой группы поразрядно соединены с
вторыми входами третьего элемента ИЛИ и элементов ИЛИ второй группы, выход второго элемента ИЛИ соединен с входом третьего формирователя импульсов через второй элемент НЕ и непосредственно с первым входом второго блока управления исполнительным механизмом, выход третьего элемента
м
1469499 °
исполнительным механизмом, выходы i
третьего и четвертого формирователей импульсов соединены с первым и вторым входами соответственно четвертого блока управления исполнительным механизмом, выходы элементов ШШ первой и второй гру п поразрядно соединены с первой и второй группами вхо

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ СКОРОСТИ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2466882C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для управления транспортным средством | 1987 |
|
SU1429130A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Устройство для управления перегрузочной тележкой распределительного конвейера | 1985 |
|
SU1265123A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ ТОКСИЧНОСТИ ВЫХЛОПА ДВИГАТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2291489C1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| Устройство для управления напольными транспортными установками | 1974 |
|
SU503776A1 |

Изобретение относится к дискретной автоматике и вычислительной технике и может быть использовано в гибких автоматических процессах для. обеспечения загрузки технологического оборудования заготовками,, инструментами. Цель изобретения - повышение производительности транспортного средства. Устройство содержит датчик параметров объекта транспортирования, датчик наличия транспортного средства, элементы И, ИЛИ, формирователи импульсов, преобразователи код-код, аналог-код, блок сравнения, элементы НЕ, блок коммутации, исполнительные механизмы, блок управления исполнительными механизмами, секции направляющего кабеля, элементы задержки, датчики слежения за трассой, группы элементов И, ИЛИ. Данное устройство обеспечивает распознавание образов объектов транспортирования по разветвленной трассе, а также обеспечивает разгрузку транспортного средства в пунктах отправления грузов и их назначения соответственно. 2 ил. с (Л
ИЛИ соединен с входом четвертого фор- юД° соответственно блока сравнения
мирователя импульсов через третийкодов, а выходы блока сравнения соеэлемент НЕ и непосредственно с вто-динены с входами третьего блока упрым входом второго блока управленияравления исполнительным механизмом.
Во
| Устройство для автоматического адресования транспортных средств | 1983 |
|
SU1089586A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для программного управления | 1984 |
|
SU1182488A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| (прототип). | |||
