(Л
4;
со
а
4
О)
10
t5
20
25
Изобретение относится к машиностроению и может быть использовано в технологическом оборудовании для плавного, бесступенчатого регулирования скорости.
Цель изобретения - увеличение долговечности путем повышения нлавности работы вариатора;
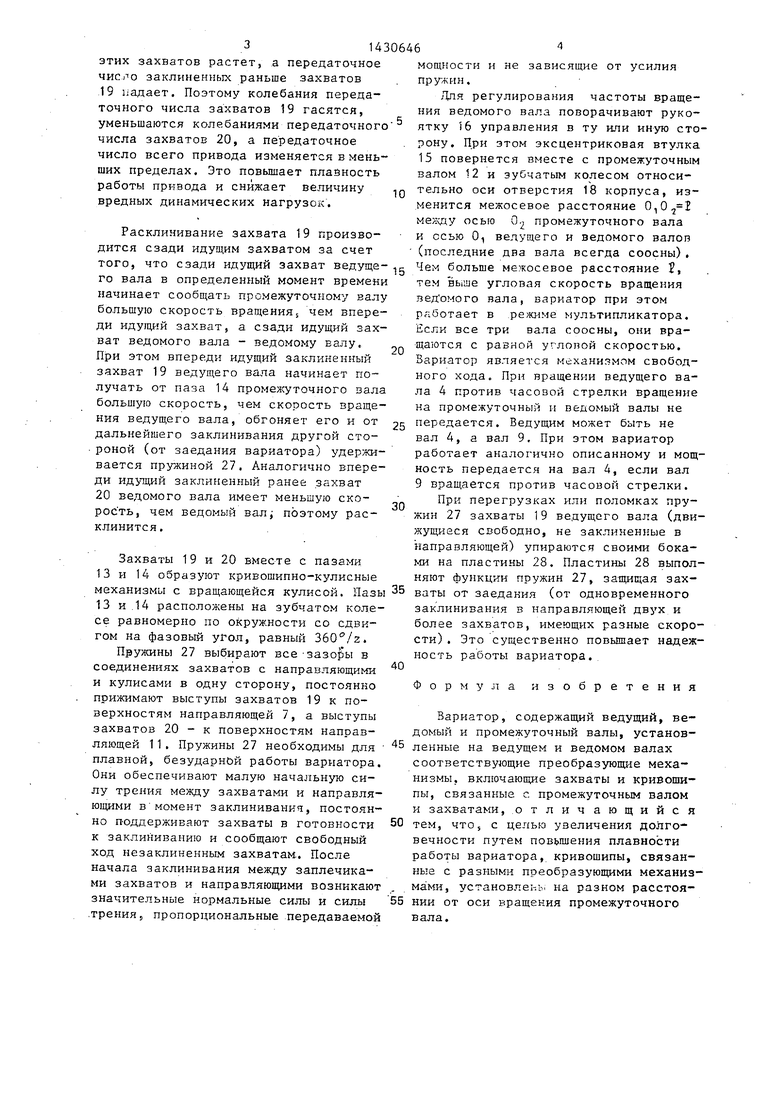
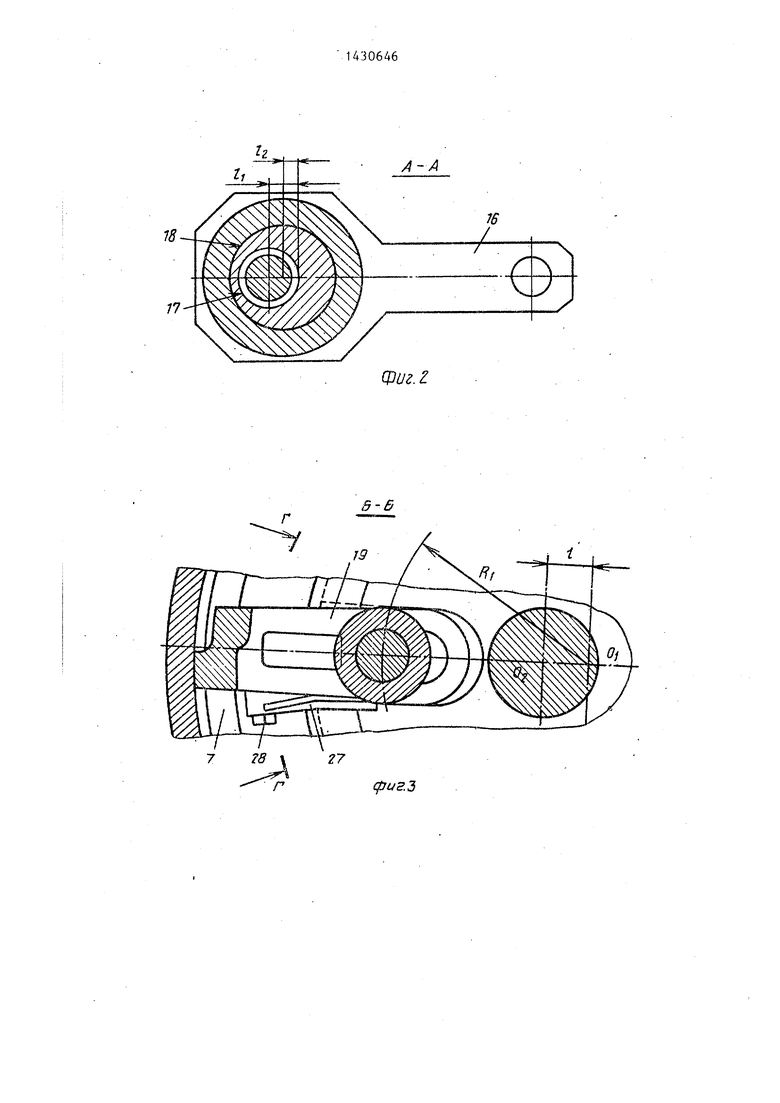
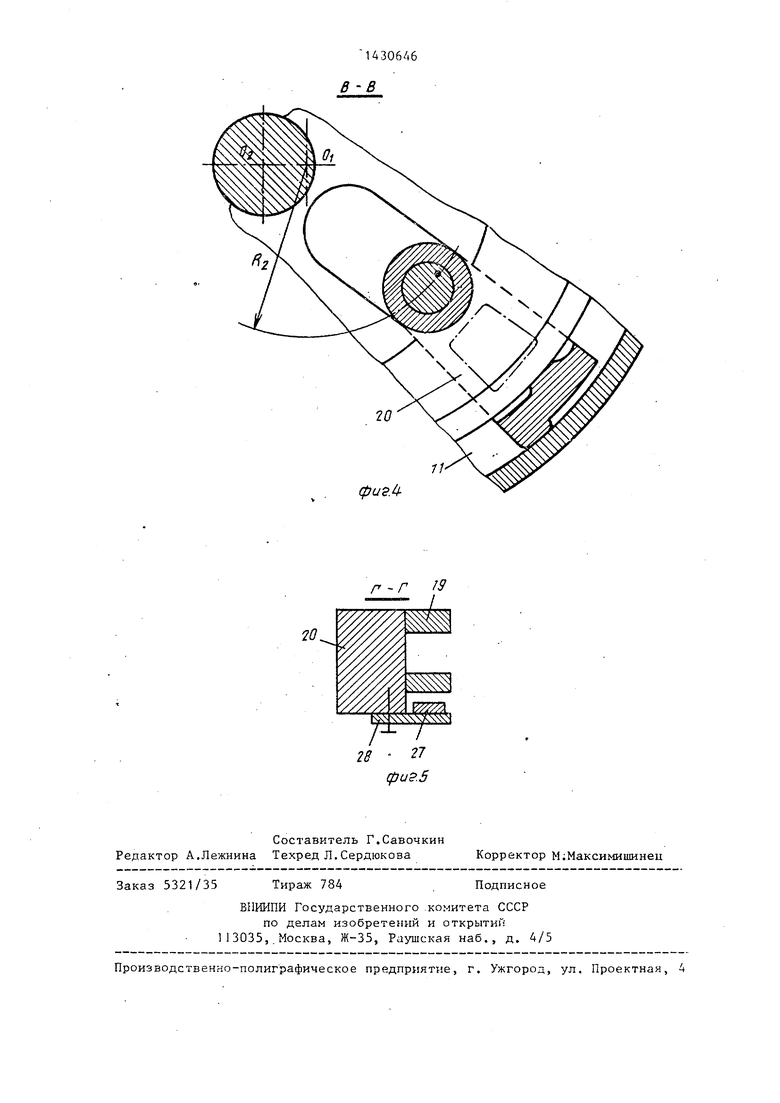
На фиг,1 изображен предлагаемый вариатор, разрез; на фиг,2 - разрез А-Л на фиг.1; на фйг.З - разрез Б-Б на фиг.1; на фиг.А - разрез В-В на фиг.1; на фиг.5 - разрез Г-Г на фиг.З.
Вариатор выполненследующим образом.
Вал двигателя 1 через зубчатые колеса 2 и 3 кт1нематически соединен с ведущим валом 4, устаноптенным в корпусе 5 на подшипниках, бойма 6 с кольцевой направляющей 7 жестко соеди ена с ведущим валом 4. В отверстии ведущего вала 4 через подшипники 8 шарнирНо размещен ведомый вал 9 с неподвижно соединенной с ним обоймой 10 с направляющей 11, На промежуточном валу 12 жестко установлено зубчатое колесо с двумя зубчатыми венцами, выполненными в виде радиальных пазов 13 и 14, Промежуточный вал 12 шарнирно соединен с корпусом 5 через ПОДШ1ТПИНКИ и регулирующее устройство в виде эксцентриковой втулки 15 и рукоятки 16 управления. Эксцентриковая втулка 15 содержит отверстие 35 17, не соосное относительно отверстия 18 в корпусе 5, в котором она уста- новлена подвижно, на величину 1. тверстие 18 корпуса эксцентри11но относительно отверстия в корпусе под подшипники ведущего вала 4 на величину lli I,. Втулка 15 жестко соеинена с рукояткой 16-. Между рукояткой 16 управления и корпусом 5 установлена упругая (резиновая) шайба, 45 являющаяся тормозом от са,мопроизволь- ного поворота рукоятки.
Преобразующие механизмы, кроме зО обойм 6 и 10, включают захваты 19, и 20 ведущего и ведомого валов, которые содержат заплечики 21 и 22, кривошипы 23 и 24, неподвижно соединенные с хвостовиками захватом, и ролики 25 и 25, свободно посаженные на кривошипы. Захваты сцеплены с зубчатым колесом (их ролики свободно, охватываются пазам 13 и 14) и под30
40
10
5
0
5
5 45
зО с
0
0
вижно размещены в направляющих 7 и 11 своими заплечиками 21 и 22.
Захваты ведущего и ведомого валов, кривошипы которых установлены в пазах 13 и 14, расположенных в одной радиальной плоскости, соединены между собой через плоские пружины 27, закрепленные неподвижно на захватах 19 ведущего вала и опирающиеся концами на пластины 28, жестко соединенные с захватам.и 20 ведомого вала. Захваты
19ведущего вала имеют больший радиус кривошипов, чем захваты 20 ведомого вала (RI RI) и установлены в направляющей 7 обоймы 6, кинематически соединенной с залом двигателя 1.
Вариатор работает следующим образом.
При вращении ведущего вала 4 по часовой стрелке (фиг.З) .мощность передается на -ведомый вал. Один из имеющихся захватов 19 ведущего вала, способный сообщать промежуточному валу 12 наибольшую скорость вращения, имеющий наименьшую абсолютную скорость вращения и расположенный ближе всех к оси 0 промежуточного вала (по сравнению с другими захватами ведущего вала) , сам по себе автомати- чески заклинивается в направляющей 7 и передает Moi;i;iiocTb от ведущег о вала 4 на промежуто шый вал 12. Один из захватов 20 ведомого вала, способный сообщать ведомому валу 9 наибольшую скорость вращения, расположенный дальше всех захватов 19 от оси Oj промежуточного вала 12 и имеющий максимальную скорость вращения, тоже сам по себе заклинивается в направляющей 11 обоймы 10 ведомого вала 9. Остальные захваты веду|дего и ведомого валов в это время имеют свободный ход, свободно проскальзывая относительно направляющих 7 4i 11. Свободный ход этим захватам сообщают плоские пружины 27. После поворота ведущего - вала на некоторые углы заклиненные захваты сами по себе расклиниваются в направляюц их, сзади идущие по ходу вращения захват ведущего вала и захват ведомого вала по себе заклиниваются в направляющих. Далее вариатор работает а галогично, захваты заклиниваются и расклиниваются после поворота промежуточного вала на один зубцоО J
вый шаг, равный 360 /2,где z - числа пазов на венцах.
В момент заклинивания захватов
20велЧомого вала передаточное число
этих захватов растет, а передаточное чис.яо заклиненных раньше захватов ,19 з;адает. Поэтому колебания передаточного числа захватов 19 гасятся, уменьшаются колебаниями передаточного числа захватов 20, а передаточное число всего привода изменяется в меньших пределах. Это повьшает плаеность работы привода и снижает величину вредных динамических нагрузок.
Расклинивание захвата 19 производится сзади идущим захватом за счет
мощности и не зависящие от усилия пружин.
Для регулирования частоты вращения ведомого вала поворачивают рукоятку 16 управления в ту или иную сторону. При этом эксцентриковая втулка 15 повернется вместе с промежуточным валом 12 и зубчатым колесом относительно оси отверстия 18 корпуса, изменится межосевое расстояние 0, мелхду осью 0.2 промежуточного вала и осью 0 ведущего и ведомого валов (последние два вала всегда соосны).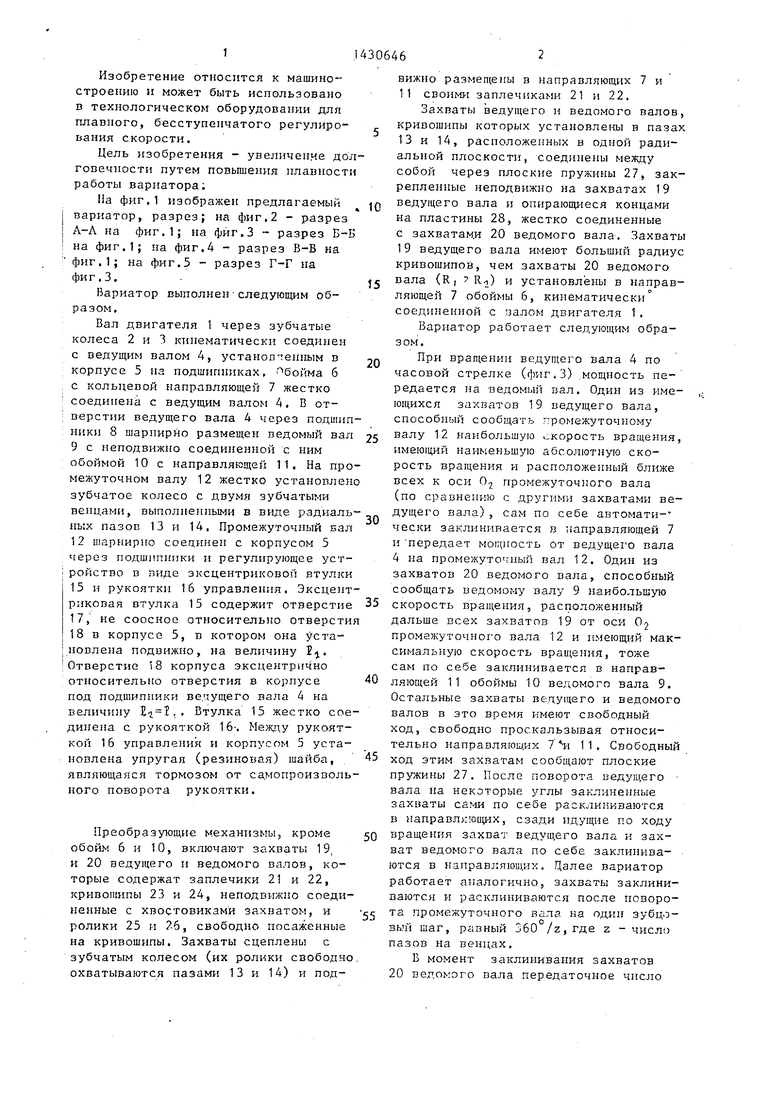
| название | год | авторы | номер документа |
|---|---|---|---|
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| Вариатор Н.П.Ефимова | 1983 |
|
SU1368550A2 |
| Вариатор Н.П.Ефимова | 1989 |
|
SU1698549A2 |
| Вариатор Н.П.Ефимова | 1981 |
|
SU1326824A1 |
| Импульсный вариатор скорости | 1981 |
|
SU977879A1 |
| СПОСОБ СООБЩЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВАРИАТОРЕ | 1997 |
|
RU2138712C1 |
| Вариатор Н.П.Ефимова | 1986 |
|
SU1514995A2 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| Обгонный механизм | 1986 |
|
SU1411528A1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
Нзобретепие относится к машиностроению и может быть использовано. в технологическом оборудовянии для плавного, бесступенчатого регулирования скорости. Целью изобретения является увеличение долговечности путем повышения плавности работы вариатора. Кривошипы 23 и 24, связанные с разными преобразующими механизмами, установлены на разном расстоянии от оси вращения промежуточного вала 12. 5 ил.
того, что сзади идущий захват ведуще- g Чем больше межосевое расстояние 2,
го вала в определенный момент времени начинает сообщать промежуточному валу большую скорость вращенияS чем впереди ИДУ1ЦИЙ захват, а сзади идущий захват ведомого вала - ведомому валу. При этом впереди идущий заклиненный захват 19 ведущего вала начинает получать от паза 14 промежуточного вала большую скорость, чем скорость вращения ведущего вала, обгоняет его и от дальнейшего заклинивания другой стороной (от заедания вариатора) удерживается пружиной 27, Аналогично впереди ИДУ7ДИЙ заклиненный ранее захват 20 ведомого вала имеет меньшую ско- рос ть, чем ведомый вал поэтому расклинится.
Захваты 19 и 20 вместе с пазами 13 и 14 образуют кривошипно-кулисные
20
25
30
тем вьгше угловая скорость вращения вед омого вала, вариатор при этом работает в .режиме мультипликатора. Если все три вала соосны, они вращаются с равной углотюй скоростью. Вариатор является механизмом свободного хода. При вращении ведущего вала 4 против часовой стрелки вращение на промежуточный и ведомь Й валы не передается. Ведущим может быть не вал 4, а вал 9, При этом вариатор работает аналогично описанному и мощ ность передается на вал 4, если вал 9 вращается против часовой стрелки.
При перегрузках или поломках пружин 27 захваты 19 ведущего вала (дви жущиеся свободно, не заклиненные в направляющей) упираются своими боками на пластины 28. Пластины 28 выпол няют функции пружин 27, защищая захмеханизмы с вращающейся кулисой. Пазы 5 ваты от заедания (от одновременного
13 и .14 расположены на зубчатом колесе равномерно по окружности со сдвигом на фазовый угол, равный . Пружины 27 выбирают все-зазоры в соединениях захватов с направляющими и кулисами в одну сторону, постоянно прижимают выступы захватов 19 к поверхностям направляющей 7, а выступы захватов 20 - к поверхностям направляющей 11. Пружины 27 необходимы для плавной, безударньй работы вариатора. Они обеспечивают малую начальную силу трения между захватами и направляющими в момент заклинивания, постоянно поддерживают захваты в готовности к заклиниванию и сообщают свободный ход незаклиненным захватам.. После начала заклинивания между заплечиками захватов и направляющими возникают значительные нормальные силы и силы .трения 5 пропорциональные передаваемой
0
5
0
тем вьгше угловая скорость вращения вед омого вала, вариатор при этом работает в .режиме мультипликатора. Если все три вала соосны, они вращаются с равной углотюй скоростью. Вариатор является механизмом свободного хода. При вращении ведущего вала 4 против часовой стрелки вращение на промежуточный и ведомь Й валы не передается. Ведущим может быть не вал 4, а вал 9, При этом вариатор работает аналогично описанному и мощность передается на вал 4, если вал 9 вращается против часовой стрелки.
При перегрузках или поломках пружин 27 захваты 19 ведущего вала (движущиеся свободно, не заклиненные в направляющей) упираются своими боками на пластины 28. Пластины 28 выполняют функции пружин 27, защищая зах
заклинивания в направляющей двух и более захватов, имеющих разные скорости) . Это существенно повышает надежность работы вариатора..
Формула
зобретения
Вариатор, содержащий ведущий, ведомый и промежуточный валы, установ ленные на ведущем и ведомом валах соответствующие преобразующие механизмы, включающие захваты и кривошипы, связанные с промежуточным валом и захватами, .отличающийся
50 тем, что, с целью увеличения долговечности путем повьш1ения плавности работы вариатора, кривошипы, связанные с разными преобразующими механиз- , установлеьъ. на разном расстоя55 НИИ от оси вращения промежуточного вала.
77
/1-Л
CPU г. 2
сриг
Составитель Г.Савочкин Редактор А.Лежнина Техред Л.Сердюкова
Заказ 5321/35
Тираж 784
ВНИИПИ Государственного .комитета СССР
по делам изобретений и открытий 113035,.Москва, Ж-35, Раушская наб., д. 4/5
7/
фиг
J9
Корректор М;Максимишинеи
Подписное
| Вариатор Н.П.Ефимова | 1984 |
|
SU1252581A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
