4ib
СО
го
00
N
Изобретение относится к электротехнике и может быть использовано в электроприводах механизмов и машин с повышенными требованиями к динамическим характеристикам и является дополнительным изобретением к изобретению по авт.ей. № 1246326.
Целью изобретения является улучшение динамических характеристик путем регулирования постоянной времени регулятора тока.
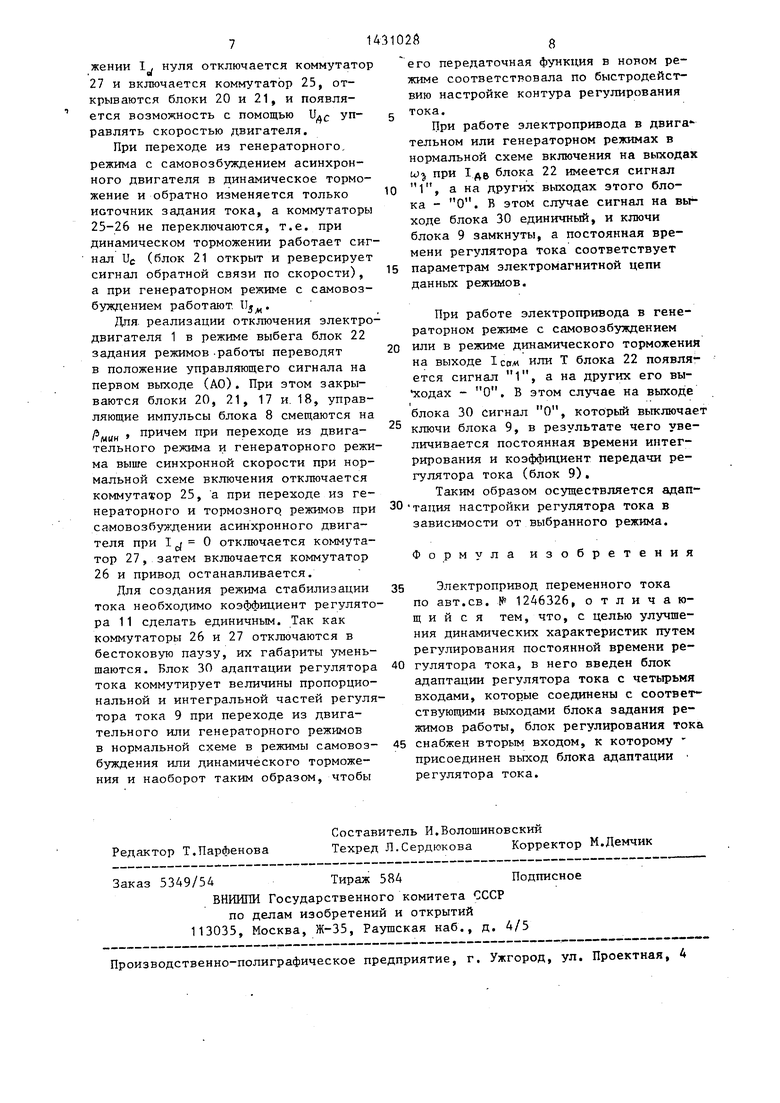
На чертеже представлена функциональная схема предлагаемого электропривода переменного тока.
Электропривод переменного тока содержит асинхронный электродвигатель 1 с фазным ротором, в роторную цепь которого включен вентильный преобразователь 2, цепь выпрямленног тока которо.го через сглаживающий дроссель 3 и датчик 4 тока соединена с мостовым тиристорным инвертором 5, ведомым сетью,, датчик 6 скорости и датчик 7 момента, соединенные с. валом электродвигателя. Управляющие входы мостового тиристорно го инвертора 5 подключены к выходам блока 8 импульсно-фазового управления, вход которого соединен с выходом блока 9 регулирования тока, подключенного входом через первьш блок
10сравнения к выходам регулятора
11момента, регулятора 12 скорости и датчика 4 тока. В цепи обратных связей блока 9 регулирования тока, регулятора 11 момента и регулятора 12 скорости включены первый 13, второй 14 и третий 15 блоки ограничения. Регулятор 11 момента входом подключен к выходу второго блока 16 сравнения, к входу которого подключены объединенные выходы первого блока 17 разрешения управления моментом и второго блока 18 разрешения управления моментом. Регулятор 12 скорости входом подключен к выходу третьего блока 19 сравнения, первый вход которого связан с выходом блока 20 разрешения управления скоростью, а второй вход с выходом блока 21 управления сигналом обратной связи по скорости. Кроме,того, электропривод содержит блок 22 задания режимов работы, блок
23 запрета сигналов, блок 24 управления коммутаторами, трехфазный 25, однофазный 26 и двухфазньш 27 коммутаторы, задатчик 28 скорости и задат чик 29 момента. Силовой вход трех
0
5
5
0
5
0
5
0
0
5
фазного коммутатора 25 подключен к трехфазной сети переменного то ка, а выход - к фазам статорной обмотки асинхронного электродвигателя 1; первая фаза статорной обмотки асинхронного двигателя 1 соединена через двух фазный коммутатор 27 с первым силовым вьгео.дом однофазного коммутатора 26 и с мостовым тиристорным инвертором 5, вторая фаза статорной обмотки асинхронного электродвигателя 1 соединена через двухфазный коммутатор. 27 с вторым силовым ВЫВОДОМ
однофазного коммутатора 26 и с вентильным преобразователем 2. Управляющие выводы трехфазного 25, однофазного 26 и двухфазного 27 коммутаторов связаны двусторонними связями К1, К2, КЗ, соответственно с первым, вторым и третьим управляют1ими выводами блока 24 управления коммутаторами и односторонними связями с первым, вторым и третьим входами первого блока 17 разрешения управления моментом.
Кроме того, управляющие вьюоды трехфазного 25 и однофазного 26 коммутаторов подключены соответственно к первым и вторым входам второго блока 18 разрешения управления моментом, блока 20 разрешения управления скоростью и блока 23 запрета сигналов. Первый выход АО блока 22 задания режимов работы подключен к первому входу блока 21 управления сигналом обратной связи по скорости , второй выход Wi| блока 22 подключен к первому входу блока 24 управления коммутаторами и к третьему входу блока 20 разрешения управления скоростью, третий выход IСС1М блока 22 подключен к четвертому входу первого блока 17 разрешения управления моментом, к первому управляющему входу первого блока 13 ограничения, к третьему входу блока 23 запрета сигналов и к второму входу блока 24 управления коммутаторами, четвертый выход , блока 22 подключен к четвертому входу блока 23 запрета сигна.пов, к третьему входу второго блока 18 разрешения управления моментом и к третьему входу блока 24 управления коммутаторами, пятьп выход Т блока 22 задания режимов работы подключен к пятому входу блока 23 запрета сигналов, к четвертому входу блока 24 управления кoм yтлтopaми и к второ
31
му управляющему входу первого блока 13 ограничения. Пятый вход первого блока 17 разрешения управления моментом и четвертый вход второго блока 18 разрешения управления моментом объединены и подключены к выходу Uj. задатчика 29 момента, а выходы первого 17 и второго 18 блоков разрешения управления моментом объединены и соединены с первым входом второго блока 16 сравнения, второй вход которого подключен к выходу датчика 7 момента. Первый и второй выходы блока 23 запрета сигналов подключены к второму Y1 и третьему Y2 входам блока 21 управления сигналом обратной связи по скорости, четвертый вход Ut которого подключен к выходу датчика 6 скорости, пятьй вход D - к выходу блока 20 разрешения управления скоростью и к первому входу третьего блока 19 сравнения, а выход - к второму входу третьего блока 19 сравне
0
жет шунтироваться цепью из резистора и ключа. Выход А1 соединен с его инвертирующим входом через конденсатор и резисторы, причем последний может шунтироваться второй цепью из резисRiПричем, --
Ri- ; коммутация ключей
тора и ключа. R2R3(R4+Ri-)
5
0
() R4:R/
осуществляется одновременно со второ го входа блока 9, в качестве ключей использованы оптронные транзисторы, RY, R, R, Rj- величины сопротивлений указанных резисторов.
Блок 30 представляет из себя дешифратор с одним выходом, собранный на элементах ИЛИ, ИЛИ-НЕ, И-НЕ. Выход блока 30 соединен с входом 2 блока 9.
Электропривод работает следующим образом.
При включении питания в схему управления или при наличии управляющего сигнала на первом выходе блока 22
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1246326A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Электропривод | 1991 |
|
SU1837379A1 |
| Частотно-регулируемый электропривод перемещения | 1987 |
|
SU1415392A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1672547A1 |
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| Способ управления преобразователем | 1989 |
|
SU1767668A1 |
Изобретение относится к элект - ротехнике. Целью изобретения является улучшение динамических характеристик путем регулирования постоянной времени регулятора тока. С этой целью электропривод переменного тока снабжен блоком 30 адаптации регулятора тока, входами подключенного к выходам блока 22 задания режимов работы, которые определяют двигательный режим, генераторный режим с самовозбуждением и генераторный режим при нормальной схеме включения асинхронного двигателя 1, которые подключены к входам блока 24 управления коммутаторами 25 и 26 и блоком 27 разрешения управления моментом. Выход блока 30 подключен к одному из входов блока 9 регулирования тока с блоком 13 ограничения в цепи обратной связи. Второй вход блока 9 соединен с выходом блока 10 сравнения, в котором сравниваются сигналы, поступающие с выходов датчика 4 тока, включенного в цепь вентильного преобразователя 2 и инвертора 5, установленных в роторной цепи двигателя 1, с выходов регуляторов 11 и 12 момента и скорости. Блок 30 обеспечивает настройку параметров блока 9 в соответствии с заданными режимами работы. 1 ил. Sg (Л
ния, четвертый вход блока 20 разреше- 25 задания режимов работы двухфазный
ния управления скоростью подключен к задатчику 28 скорости.
Блок 17 разреп ения управления моментом пропускает сигнал управления с задатг ика 29 момента на второй блок 16 сравнения в режиме самовозбуждения асинхронного электродвигателя 1, а блок 18 разрешения управления моментом - при нормальной схеме включения асинхронного вентильного каскада. Блок 30 адаптации регулятора тока формирует оптимальную настройку регулятора тока 9 путем коммутации RC-цепочек в соответствии с положением управляющего сигнала в блоке 22 задания работы.
Сигналы с выходов блока 22 задают следующие режимы работы электропривода: с первого выхода - торможение на выбеге (АО), со второго выхода - двигательный режим (ulj), с третьего выхода - генераторный режим с самовозбуждением асинхронного двигателя Цсам) четвертого выхода - генераторный режим при нормальной схеме включения (1да), с пятого выхода - динамическое торможение (Т).
Блок 9 представляет из себя пропорционально-интегральный регулятор тока с изменяемой постоянной времени Основу ее составляет операционный усилитель, инвертирующий вход которого соединен с первым входом блока через резисторы, причем последний мо0
5
0
5
0
5
коммутатор 27 включен и угол управления мостовым тиристорным инвертором 5 равен минимальной величине Для работы электропривода в режиме стабилизации скорости блок 22 задания режимов работы устанавливают в положение, при котором имеет место сигнал на втором его выходе (г) При этом через блок 24 включается трехфазный коммутатор 25, подключая статор асинхронного двигателя 1 в сети и разрешая блоку 20 пропустить сигнал управления Wo. на вход регулятора 12 рости. Величиною 11 j задается нужная скорость привода. Если первоначальный режим электропривода - генераторный в нормальной схеме включения вьше синхронной скорости, блок 22 задания режима работы ставят в положение управляющего сигнала на четвертом выходе (Тдв). В этом случае также через блок 24 замыкается коммутатор 25, запитывая двигатель 1 и разрешая блоку 18 пропустить сигнал управления Uj на вход регулятора 11 момента. Из-за наличия на входе блока 20 комбинации сигналов У1ЛУ2ЛВ, где Y1 Ic«MVlA6, Y2 ТЛПЛКЗ; I) - выходной сигнал блока 20; К1, К2, КЗ. - логические сигналы на выводах блока 24 управления коммутаторами 25-27 соответственно, блок 21 не пропускает сигнал и с. и нужный момент привода задают величиной . Блок
13 в двигательном режиме и генераторном режиме при нормальной схеме включения ограничивает максимальный угол управления инвертором 5 на уровне ,кс 93 эл.град.
При необходимости первоначального включения электропривода в генера- торлый режим работы с самовозбуждением асинхронного электродвигателя блок 22 задания режимов работы выс- :тавляют в положение управляющего сиг- : нала на третьем выходе (Хса/к)- Про- ;цесс самовозбуждения осзтцествляется
ограничением угла управления в блоке 15 и изменением Ui можно устанавливать : 13 на уровне /Зд,акс 93 эл.град., нужньш момент двигателя. :благодаря чему инвертор 5 на началь- : ньгй период самовозбуждения перевоОбратный переход из генераторного режима с самовозбуждением в двигательный осуществляется следующим
дится в вьтрямительный режим, подпи-, тывая обмотку статора выпрямленным током ротора, а после развития процесса самовозбуждения инвертор 5 вновь переводится в инверторньй режим. При этом сигналом с блока 24 включается коммутатор 27 и отключается коммутатор 26, разрешая бло- , ку 17 пропустить в схему регулирования сигнал задания момента . В случае необходимости перехода из двигательного режима работы в генераторный в нормальной схеме включения привода на скорости вьше синхронной последовательность работы схемы следующая.
Обратный переход из генераторного режима с самовозбуждением в двигательный осуществляется следующим
20 образом.
Блок 22 задания режимов переводят в положение управляющего сигнала на втором выходе (, блок 13 переводится на ограничение /j 25 90 эл.град., управляющие импульсы блока 8 смещаются на
, включается ком1 1утатор 26, при спадании тока 1 до нуля отключается коммутатор 27 и при включении коммутатора 25 выход- 30 ные сигналы блоков 20 и 21 позволяют устанавливать нужную скорость электродвигателя изменением Uvc .
При переходе с двигательного режима в режим динамического торможения Блок 22 задания режимов работы пе- gg с самовозбуждением асинхронного дви- реводится в положение управляющего гателя блок 22 задания режимов уста- сигнала на четвертом выходе (1дв), навливают в положение управляющего при этом закрывается блок 20 сигнала- сигнала на пятом выходе (Т), блоки ми Ы., К1, К2 и блок 21 сигналами 21 и 20 в начале закрываются, блок 13 Y1 , Y2, D, после чего блок 18 разре- до переводится на ограничение ft шает пропустить сигнал U, на регулятор 11 момента. При этом коммутаторы 25 и 26 включены, а коммутатор 27 отключен, состояние блока 13 не меняется.
При обратном переходе из генераторного режима () в двигательный (Wi) необходимо выставить V м - О а блок 22 задания режимов работы перевести в положение управляющего сиг- 50 блока 24 отключается коммутатор 27. нала на втором выходе (w,p . Тогда им- Переход в двигательный режим из .пульсы управления сетевым инвертором- 5 уходят на /ь включаются блоки 20 и 21 и разрешают изменением II«с ус 93 эл.град.,, управляющие импульсы н а выходе блока 8 смещаются на р,оин , отключается коммутатор 25, включается коммутатор 27, потом отключается }g коммутатор 26 сигналом, открывается блок 21, который реверсирует полярность и. Торможение идет в режиме токоограничения до тех пор пока Uj, не станет равным ну.ггю, далее сигналом
динамического торможения осуществляется переводом блока 22 задания режимов работы в положение управляющего
тановить необходимую скорость приво- 55 сигнала на втором выходе (w, блок да. Состояние блока 13 и коммутато- 13 переводится на 90 эл.град., ров 25-27 не меняется. Коммутаторы блок 21 закрывается, управляющие им- 25 и 26 включены, а коммутатор 27 пульсы блока 8 смешаются на , отключен.
включается коммутато) 26 и при дости
Переход из двигательного режима в генераторный при самовозбуждении асинхронной машины следующий.
Блок 22 задания режимов переводят в положение управляющего сигнала на третьем выходе (ICWM При этом блок 13 ограничения выставляет ограничение /ь 93 эл.град., закрьтаются блоки 20 и 21, управляющие импульсы устанавливаются в /3, , выключается коммутатор 25 и включается коммутатор 27, а при спадании тока ротора 1 до, нуля выключается коммутатор 26
и изменением Ui можно устанавливать нужньш момент двигателя.
Обратный переход из генераторного режима с самовозбуждением в двигательный осуществляется следующим
образом.
Блок 22 задания режимов переводят в положение управляющего сигнала на втором выходе (, блок 13 переводится на ограничение /j 90 эл.град., управляющие импульсы блока 8 смещаются на
, включается ком1 1утатор 26, при спадании тока 1 до нуля отключается коммутатор 27 и при включении коммутатора 25 выход- ные сигналы блоков 20 и 21 позволяют устанавливать нужную скорость электродвигателя изменением Uvc .
При переходе с двигательного режима в режим динамического торможения с самовозбуждением асинхронного дви- гателя блок 22 задания режимов уста- навливают в положение управляющего сигнала на пятом выходе (Т), блоки 21 и 20 в начале закрываются, блок 13 переводится на ограничение ft
блока 24 отключается коммутатор 27. Переход в двигательный режим из
93 эл.град.,, управляющие импульсы н а выходе блока 8 смещаются на р,оин , отключается коммутатор 25, включается коммутатор 27, потом отключается коммутатор 26 сигналом, открывается блок 21, который реверсирует полярность и. Торможение идет в режиме токоограничения до тех пор пока Uj, не станет равным ну.ггю, далее сигналом
сигнала на втором выходе (w, блок 13 переводится на 90 эл.град., блок 21 закрывается, управляющие им- пульсы блока 8 смешаются на ,
включается коммутато) 26 и при достижении 1 нуля отключается коммутатор 27 и включается коммутатор 25, открываются блоки 20 и 21, и появляется возможность с помощью управлять скоростью двигателя.
При переходе из генераторного, режима с самовозбуждением асинхронного двигателя в динамическое торможение и обратно изменяется только источник задания тока, а коммутаторы 25-26 не переключаются, т.е. при динамическом торможении работает сигнал DC (блок 21 открыт и реверсирует сигнал обратной связи по скорости), а при генераторном режиме с самовозбуждением работают. 115.
Для. реализации отключения электродвигателя 1 в режиме выбега блок 22 задания режимов-работы переводят в положение управляющего сигнала на первом выходе (АО). При этом закрываются блоки 20, 21, 17 и. 18, управляющие импульсы блока 8 смещаются на мин причем при переходе из двигательного режима и генераторного режима выше синхронной скорости при нормальной схеме включения отключается коммутачгор 25, а при переходе из генераторного и тормозного режимов при самовозбуждении асинхронного двигателя при I ij О отключается коммутатор 27, затем включается коммутатор 26 и привод останавливается.
Для создания режима стабилизации тока необходимо коэффициент регулятора 11 сделать единичным. Так как коммутаторы 26 и 27 отключаются в бестоковую паузу, их габариты уменьшаются. Блок 30 адаптации регулятора тока коммутирует величины пропорциональной и интегральной частей регулятора тока 9 при переходе из двигательного или генераторного режимов в нормальной схеме в режимы самовозбуждения или динамического торможения и наоборот таким образом, чтобы
его передаточная функция в новом режиме соответствовала по быстродействию настройке контура регулирования тока.
При работе электропривода в двига тельном или генераторном режимах в нормальной схеме включения на выходах u) при 1дб блока 22 имеется сигнал 1, а на других выходах этого блока - О. В этом случае сигнал на вьг- ходе блока 30 единичный, и ключи блока 9 замкнуты, а постоянная времени регулятора тока соответствует параметрам электромагнитной цепи данных режимов.
При работе электропривода в генераторном режиме с самовозбуждением или в режиме динамического торможения на выходе I сом или Т блока 22 появляется сигнал 1, а на других его вы- ходах - О, В этом случае на выходе
блока 30 сигнал О, который выключает ключи блока 9, в результате чего увеличивается постоянная времени интегрирования и коэффициент передачи регулятора тока (блок 9),
Таким образом осуществляется адаптация настройки регулятора тока в зависимости от выбранного режима.
Формула изобретения
Электропривод переменного тока по авт.св. № 1246326, отличающийся тем, что, с целью улучшения динамических характеристик путем регулирования постоянной времени ре-
гулятора тока, в него введен блок адаптации регулятора тока с четьфьмя входами, которые соединены с соответствующими выходами блока задания режимов работы, блок регулирования тока
снабжен вторым входом, к которому присоединен выход блока адаптации регулятора тока.
| Электропривод переменного тока | 1984 |
|
SU1246326A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
