Изобретение относится к электротехнике может быть использовано в механизмах общепромышленного назначения, в частно- в регулируемых электроприводах на ба- асинхронного двигателя с откозамкнутым ротором и преобразова- ем частоты с непосредственной связью и ественной коммутацией без датчика скостзе ко те ее ро
ти на валу асинхронного двигателя.
Целью изобретения является повыше- ни точности регулирования частоты вращения асинхронного двигателя, повышение его быстродействия и максимальной частоты вращения npj/i работе от преобразователя частоты с непосредственной связью и ее ественной коммутацией.
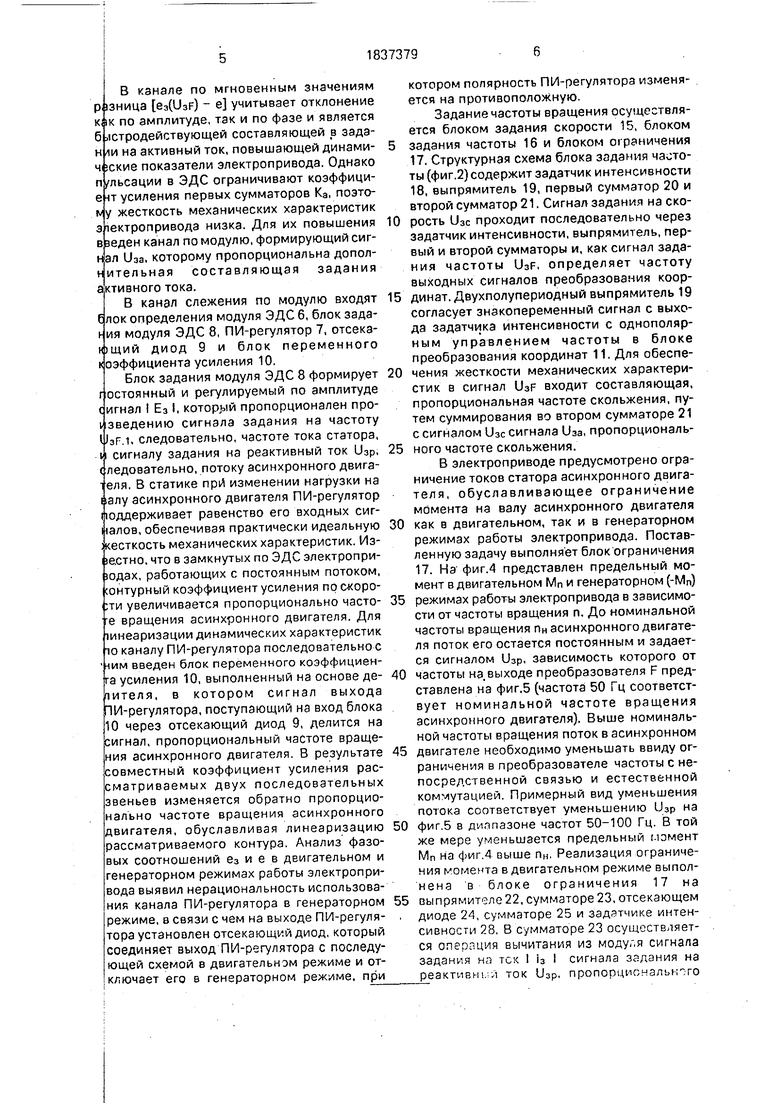
На фиг.1 представлена структурна схема электропривода; на фиг.2 - структурная сх :ма блока задания частоты; на фиг.З - ст уктурная схема блока ограничения; на
фиг.4 - принцип формирования экскаваторных характеристик электропривода; на фиг.5 - примерный вид сигнала задания на реактивный ток от частоты F на выходе преобразователя частоты.
Электропривод содержит асинхронный двигатель АД с короткозамкнутым ротором 1, преобразователь частоты ПЧ с непосредственной связь и естественной коммутацией 2, три датчика тока ДТ 3, три датчика напряжения ДН 4 фаз асинхронного двигателя, блок выделения фазных ЭДС 5, блок определения модуля МЭДС 6, ПИ-регулятор 7, блок задания модуля ЗЭДС 8, отсекающий диод 9, блок переменного коэффициенты усиления (У) 10, блок преобразования координат ПК 11, блок задания реактивного тока ЗРТ 12, три первых сумматора С1 13, три вторых сумматора С2 14. блок задания
00 СА Х| Сл VI Ю
корости БЗ 15, блок задания частоты 16 и лок ограничения БО 17.
Асинхронный двигатель 1 общепроышленного назначения выполняется с ко- откозамкнутым ротором.
Преобразователь частоты 2 с непосредтвенной связь и естественной коммутаией может быть выполнен по мостовой хеме с раздельным управлением вентильыми комплектами.
В качестве датчиков тока 3 и напряжеия 4 используются промышленные датчии.
Блок выделения фазных ЭДС 5 может ыть выполнен по схеме фильтра на операционных усилителях,г
Блок определения модуля ЭДС б представляет собой обычный выпрямитель фазных ЭДС.
ПИ-регулятор 7 выполняется по известной схеме на основе интегральных микросхем,
Блок задания модуля ЭДС 8 и блок переменного коэффициента усиления 10 могут быть реализованы на основе микросхемы 525 ПС2.
Блок преобразования координат 11 по известной схеме преобразования постоянного уровня напряжения в синусоидальный сигнал.
Блок задания реактивного тока 12 представляет собой схему регулирования постоянного уровня напряжения.
Сумматоры 13 и 14 представляют собой обычные операционные усилители с суммирующими входами.
Блок задания скорости 15 представляет собой задатчик регулируемого постоянного уровня напряжения.
Возможна реализация блоков задания частоты 16 и блока ограничения 17 приводится ниже в описании соответственно на фиг.2 и фиг.З.
Асинхронный электропривод работает следующим образом. Преобразователь час- тоты 2 работает в режиме источника тока и формирует три фазных тока асинхронного двигателя в соответствии с тремя входными сигналами задания на ток 3, поступающих с трех выходов вторых сумматоров 14. В каждом из вторых сумматоров 14 производится суммирование ранее сформированных составляющих сигнала задания 13, а именно активной составляющей сигнала задания la и реактивной составляющей сигнала задания Ip. Таким образом, в электроприводе осуществляется векторное управление, при котором активная и реактивная составляющие сигнала задания ортогональны. При этом в двигательном режиме работы электропривода 3 опережает ip, а в генераторном режиме 1а отстает приблизительно на 90 эл.град.
Электропривод реализован по бездатчиковому варианту, в котором используется косвенное измерение частоты вращения асинхронного двигателя по модулю ЭДС двигателя. Для этого информация о мгновенных значениях тока и напряжения фаз асинхронного двигателя, соответственно на выходах блоков 3 и 4, поступает на входы трехканального блока выделения фазных ЭДС 5, на трех выходах которого формируется трехфазная симметричная система фазных ЭДС е, поступающая на вход блока определения модуля ЭДС 6, в котором осуществляется выпрямление входных напряжений. На выходе блока 6 сформировано постоянное напряжение - модуль ЭДС I EI, пропорциональное произведению частоты вращения и потока асинхронного двигателя.
Частота вращения двигателя задается постоянным и регулируемым по величине сигналом задания частота 1)3р, вырабатываемым в блоке задания частоты 16 и поступающим на первый вход блока преобразования координат 11, на второй вход которого поступает постоянный и регулируемый по величине сигнал задания на амплитуду реактивного тока U3p с блока задания реактивного тока 12, на третий вход блока 11 поступает постоянный и регулируемый по величине сигнал задания на дополнительную составляющую активного тока Уза с блока переменного коэффициента усиления 10. Блок преобразования координат . 11 вырабатывает две тройки симметричных
трехфазных сигналов для соответствующих трех каналов преобразователя частоты. Частота этих сигналов определяется входным сигналом U3p. Первая тройка сигналов вз представляет собой задания на мгновенные ЭДС асинхронного двигателя, амплитуда
0
5
0
5
0
5
которых пропорциональна произведению сигналов U3p и (U3F + U3a). то есть еэ - (U3p + +Uaa) U3p. Вторая тройка сигналов ip представляет собой сигналы задания на реактивные токи фаз асинхронного двигателя,
амплитуды которых пропорциональны сигналу U3p. Первая тройка сигналов е3 ортогональна второй Ip и опережает ее по фазе.
Обеспечение требуемого момента асинхронного двигателя осуществляется формированием задания активной составляющей тока la в первых сумматорах 13 и использованием двух каналов формирования; канал слежения по мгновенным значениям и канал слежения по модулю. В результате
fa - Ка в3 (U3F) - ej + Ка е3 (Usa) в.
В канале по мгновенным значениям розница еэ(и3р) - е учитывает отклонение к по амплитуде, так и по фазе и является .ютродействующей составляющей в задали на активный ток, повышающей динами- ские показатели электропривода. Однако льсации в ЭДС ограничивают коэффициент усиления первых сумматоров Ка, поэтому жесткость механических характеристик 1ектропривода низка. Для их повышения вЬеден канал по модулю, формирующий сигнал U3a, которому пропорциональна допол- нительная составляющая задания активного тока.
В канал слежения по модулю входят Блок определения модуля ЭДС 6, блок зада- ния модуля ЭДС 8, ПИ-регулятор 7, отсекающий диод 9 и блок переменного коэффициента усиления 10.
Блок задания модуля ЭДС 8 формирует г остоянный и регулируемый по амплитуде сигнал I Ез I, которой пропорционален про- I- зведению сигнала задания на частоту UaF.i. следовательно, частоте тока статора, i сигналу задания на реактивный ток U3p, С ледовательно, потоку асинхронного двига- еля, В статике при изменении нагрузки на 1алу асинхронного двигателя ПИ-регулятор юддерживает равенство его входных сиголов, обеспечивая практически идеальную кесткость механических характеристик. Из- е,стно, что в замкнутых по ЭДС электропри- юдах, работающих с постоянным потоком, :онтурный коэффициент усиления по с-коро- ;ти увеличивается пропорционально часто- е вращения асинхронного двигателя. Для 1инеаризации динамических характеристик ю каналу ПИ-регулятора последовательно с ним введен блок переменного коэффициен- а усиления 10, выполненный на основе деятеля, в котором сигнал выхода ТИ-регулятора, поступающий на вход блока О через отсекающий диод 9, делится на сигнал, пропорциональный частоте вращения асинхронного двигателя. В результате совместный коэффициент усиления рассматриваемых двух последовательных звеньев изменяется обратно пропорционально частоте вращения асинхронного двигателя, обуславливая линеаризацию эассматривземого контура. Анализ фазовых соотношений ез и е в двигательном и операторном режимах работы электропривода выявил нерациональность использования канала ПИ-регулятора в генераторном эежиме, в связи с чем на выходе ПИ-регулятора установлен отсекающий диод, который соединяет выход ПИ-регулятора с последующей схемой в двигательном режиме и отключает его в генераторном режиме, при
котором полярность ПИ-регулятора изменяется на противоположную.
Задание частоты вращения осуществляется блоком задания скорости 15, блоком 5 задания частоты 16 и блоком ограничения
17.Структурная схема блока задания частоты (фиг.2) содержит задатчик интенсивности
18,выпрямитель 19, первый сумматор 20 и второй сумматор 21. Сигнал задания на ско0 рость Uac проходит последовательно через задатчик интенсивности, выпрямитель, первый и второй сумматоры и, как сигнал задания частоты U3F, определяет частоту выходных сигналов преобразования коор5 динат.Двухполупериодный выпрямитель 19 согласует знакопеременный сигнал с выхода задатчика интенсивности с однополяр- ным управлением частоты в блоке преобразования координат 11. Для обеспе0 чения жесткости механических характеристик в сигнал UsF входит составляющая, пропорциональная частоте скольжения, путем суммирования во втором сумматоре 21 с сигналом Use сигнала Уза, пропорциональ5 ного частоте скольжения.
В электроприводе предусмотрено ограничение токов статора асинхронного двигателя, обуславливающее ограничение момента на валу асинхронного двигателя
0 как в двигательном, так и в генераторном режимах работы электропривода. Поставленную задачу выполняет блок ограничения 17. На фиг.4 представлен предельный момент в двигательном Мп и генераторном (-Мп)
5 режимах работы электропривода в зависимости от частоты вращения п. До номинальной частоты вращения гы асинхронного двигателя поток его остается постоянным и задается сигналом изр, зависимость которого от
0 частоты на.выходе преобразователя F представлена на фиг.5 (частота 50 Гц соответствует номинальной частоте вращения асинхронного двигателя). Выше номинальной частоты вращения поток в асинхронном
5 двигателе необходимо уменьшать ввиду ограничения в преобразователе частоты с непосредственной связью и естественной коммутацией. Примерный вид уменьшения потока соответствует уменьшению U3p на
0 фиг.5 в диапазоне частот 50-100 Гц. В той же мере уменьшается предельный момент Мр на фиг.4- выше РН. Реализация ограничения момента в двигательном режиме выпол- нена в блоке ограничения 17 на
5 выпрямителе22, сумматоре 23, отсекающем диоде 24, сумматоре 25 и з адэтчике интенсивности 28. В сумматоре 23 осуществляется операция вычитания из модуля сигнала задания на тек I i3 I сигнала задания на реактивней ток U3p. пропорционального
Мп. Сигнал Г13 формируется путем выпрямления соответствующих сигналов задания з на ток фаз асинхронного двигателя в выпрямителе 22, В случае превышения I I3 I установленного уровня 1)зр положительная разность I Ы - Uap +Uorp через отсекающий диод 24, сумматор 25 и задатчик интенсивности 28 поступает в блок задания частоты 16, где вычитается из сигнала Use и определяет уменьшение выходного сигнала U3F. В свою очередь, уменьшение U3F определяет уменьшение амплитуды ез и частоты на выходе блока преобразования координат 11 и стабилизирует с учетом коэффициента усиления, рассматриваемого канала блока ограничения, амплитуду активной составляющей сигнала задания а и, следовательно, амплитуду токов в фазах асинхронного двигателя и его момент. Примерный вид механических характеристик, сформированных рассматриваемым каналом блока ограничения, приведен в первом квадранте на фиг.4. Если I 13 I меньше U3p, то отсекающий диод 24 не пропускает отрицательную разницу на выход блока ограничения.
Реализация ограничений токов статора асинхронного двигателя и момента в генераторном режиме выполнена на сумматоре 27, отсекающем диоде 26, сумматоре 25 и задатчике интенсивности 28. Поскольку в генераторном режиме ПИ-регулятор не участвует, то активная составляющая тока определяется разницей еэ и е, которой пропорциональна разница модулей I Ез и I Е I .Работа блока ограничения в генераторном режиме происходит следующим образом. В режиме холостого хода коэффициент суммирования в сумматоре 27 для сигнала I E3I установлен с превышением над сигналом I EI .С увеличением нагрузки I EI увеличивается и при его превышении сигнала Ез вырабатывается отрицательный сигнал, который через отсекающий диод.26, как сигнал (-Uorp), через сумматор 25 и задатчик интенсивности 28 поступает в блок задания частоты 16, где (-U0rp) суммируется с сигналом Use, в результате чего увеличивается сигнал задания на частоту U3F, который через блок преобразования координат 11 увеличивает сигнал е3, уменьшая разницу (е - ез) и ограничивая активную составляющую тока, а следовательно, момент асинхронного двигателя. Примерный вид механических характеристик в генераторном режиме приведен на фиг.4 во втором квадранте.
Роль задатчика интенсивности заключается в обеспечении плавного регулирования и повышения устойчивости электропривода в зоне ограничения момента.
Использование сигнала U3p.2 в блоке переменного коэффициента усиления 10 и недопустимость использования последующих сигналов этого блока UaF.1 или U3p обусловлено необходимостью исключения положительной обратной связи по контуру: ПИ-регулятор - сигнал Uorp и получения устойчивой работы электропривода на участке формирования экскаваторных характери0 стик.
Блок задания реактивного тока 12 формирует сигнал задания на реактивный ток Usp на основе входного сигнала 113р,1, пропорционального частоте вращения, путем
5 кусочно-линейной аппроксимации, При этом в диапазоне частот вращения от нуля до номинальной (в диапазоне частот преобразователя частоты от нуля до 50 Гц) регули- рование асинхронного двигателя
0 осуществляется с постоянством потока и сигнал Кзр остается неизменным и задает номинальный поток в асинхронном двигателе. В диапазоне частот вращения от номинальной до двойного номинального
5 значения, соответственно для выходных частот преобразователя частоты от 50 до 100 Гц, необходимо уменьшать поток асинхронного двигателя в связи с ограничением выходного напряжения преобразователя
0 частоты и уменьшением кратности выходной частоты преобразователя и его частоты пульсаций-. Примерный вид U3p в зависимости от частоты на выходе преобразователя частоты F приведен на фиг.5.
5 Таким образом, за счет жесткого задания частоты преобразователя в соответствии с сигналом задания на скорость в данном электроприводе по сравнению с прототипом повышается точность установ0 ки заданной частоты вращения, а введение частоты скольжения в сигнал задания частоты обеспечивает поддержание заданной частоты вращения и под нагрузкой.
В предложенном электроприводе суще5 ствует два канала управления активной составляющей тока: канал управления по модулю, быстродействие которого ограничено фильтрацией при выделении модуля ЭДС, и канал управления по мгновенным
0 значениям, наиболее быстродействующий в котором осуществляется слежение как за фазой ЭДС двигателя, так и за амплитудой, что является более совершенным по сравнению с прототипом и позволяет повысить
5 устойчивость электропривода и.его быстродействие.
Предложенное решение позволяет в более полной мере использовать возможности электропривода с преобразователем часто- ты с непосредственной связью и естественню и коммутацией, что позволило поднять частоту вращения асинхронного двигателя До двойного значения от номинальной. ф о рм у л а и зо б р ете н и я.
Электропривод, содержащий трехфаз- н ый асинхронный двигатель с короткозамк- нутым ротором, фазные обмотки статора которого подключены к входам трехфазного преобразователя частоты с непосредственной связью и естественной коммутацией, Елок выделения фазных ЭДС, входы которого подключены к выходам датчиков фазных токов и напряжений, включенных в цепи фазных обмоток статора, а выходы соединены с входами блока определения модуля ЭДС, выход которого соединен с первым Е ходом П М-регулятора активного тока статора, блок преобразования координат, входы которого подключены соответственно к первому выходу блока задания частоты, соединенного одним из входов с выходом бло- :а задания частоты вращения, к выходу блока задания реактивного тока, отличающийся тем, что, с целью повышения точности регулирования частоты вращения Двигателя и быстродействия, введены первые и вторые фазнь1е сумматоры, блок ограничения, блок задания модуля ЭДС, отсекающий диод и блок переменного коэффициента усиления, причем первые выхо- ды блока преобразования координат подключены к первым входам первых фазных сумматоров, вторые входы которых подключены к выходам блока выделения фазных ЭДС, выходы первых фазных сумматоров подключены к первым входам вторых фазных сумматоров, а их вторые входы - к
вторым выходам блока преобразования координат, выходы вторых фазных сумматоров подключены к управляющим входам преобразователя частоты с непосредственной связью и естественной коммутацией,
второй выход блока задания частоты подключен к входу блока задания реактивного тока и к первому входу блока задания модуля ЭДС, второй вход которого соединен с выходом блока задания реактивного тока, а
выход блока задания модуля ЭДС соединен с вторым входом ПИ-регулятора, выход которого соединен с анодом отсекающего диода, катод которого соединен с-первым входом блока переменного коэффициента
усиления, второй вход которого соединен с третьим выходом блока задания частоты, выход блока переменного коэффициента усиления соединен с третьим входом блока преобразования координат и вторым входом блока задания частоты, первый, второй, третий и четвертый входы блока ограничения соединены соответственно с выходом блока задания реактивного тока, выходами вторых фазных сумматоров, с выходом бло0 ка задания модуля ЭДС v с выходом блока определения модуля ЭДС. выход блока ограничения соединен с третьим входом блока задания частоты,
Фиг.г
W



| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1996 |
|
RU2109397C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
Использование: частотно-управляемый электропривод с асинхронным короткозам- ш гтым двигателем в механизмах общепро- мь шлейного назначения без датчика скорости на валу. Сущность: электропривод содержит трехфазный асинхронный двигатель, фазные обмотки статора которого под- ключены -к выходам преобразователя частоты, датчики тока и напряжения, блок выделения фазных ЭДС, входы которого подключены к выходам датчиков токов и напряжений, блок определения модуля ЭДС, выход которого соединен с первым входом ПИ-регулятора, блок преобразования координат, входы которого подключены соответственно к первому выходу блока задания частоты, к выходу задания реактивного тока, блок задания частоты вращения. Устройство также содержит первый и второй сумматоры, блок ограничения, блок задания модуля ЭДС, отсекающий диод и блок переменного коэффициента усиления. 5 ил.
/&/Cj7 5. t5 -%
п
/ т
%.
-vH
У М
Рм4
Фиг. У
| Химический хак для подсочки деревьев | 1958 |
|
SU117813A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1978 |
|
SU797043A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
