Изобретение относится к системам управления копающими механизмами одноковшовых экскаваторов, кранов и ряда других машин с тяжелыми условиями работы.
Цель изобретения - повышение надежности управления за счет исключения аварийных режимов.
На чертеже изображена схема системы для управления электроприводами одноковшового экскаватора.
ВИЯМИ механической прочности и перегрузочной способности двигателей поворота.
При перегреве одного из главных электроприводов сигнал с соответствующего термодатчика превышает запирающий потенциал порогового элемента 9. При этом на выходе порогового элемента 9 появляется напряжение, поступающее на силовой вход замыкающего аналогового кдюча 10.
В режиме разгона полярности сигналов
Система включает устройство 1 управ- 10 датчиков напряжения 26 и тока 33 совпадают.
При этом в режиме разгона при повороте в забой диоды 24 и 29 оказываются включенными в прямом направлении, а диоды 25 и 30 - в обратном направподключено к преобразователю 6 с присое- лении. Поэтому на оба входа 22 и 27 ло- диненным к нему двигателем 7. Термодат- гического элемента И 20 поступают сигналы, чик 8 подключен к первому входу порогового элемента 9, выход которого через
ления электроприводом поворота, состоящее из последовательно соединенных командоап- парата 2, регулятора 3 ЭДС со звеном 4 ограничения в цепи обратной связи и регулятора 5 тока. Устройство 1 управления
замыкающий аналоговый ключ 10 соединен
в результате чего появляется сигнал на его выходе, который поступает на вход логического элемента ИЛИ 19. На выходе с звеном 4 ограничения. Второй вход поро- 2о этого элемента появляется напряжение, кото- гового элемента 9 соединен с термодатчи- рое подается на управляющий вход ключа 10.
Ключ 10 замыкается и напряжение с выхода порогового элемента 9 через ключ 10 поступает в звено 4 ограничения. При этом
ком 11 привода подъема, состоящего из устройства 12 управления, соединенного с преобразователем 13, подключенным к двигателю 14. Третий вход порогового элемента 9 соединен с термодатчиком 15 привода на- 25 лятора 3 ЭДС, определяющее установку ре- пора, включающего устройство 16 управле-гулятора 5 тока, благодаря чему понижаетуменьщается напряжение ограничения регуния и преобразователь 17, соединенный с двигателем 18. Управляющий вход аналогового ключа 10 соединен с выходом логического элемента ИЛИ 19, входы которого соединены с логическими элементами И 20 и 21, входы 22 и 23 которых через диоды 24 и 25 подключены к датчику 26 напряжения привода поворота, а входы 27 и 28 через диоды 29-30 и стабилитроны 31-32 подключены к датчику 33 тока привода поворота.
Способ управления электроприводами одноковшового экскаватора заключается в том, что задают допустимые значения перегрева электроприводов подъема, поворота и напора экскаватора, измеряют текущую температуру 40 этих приводов, сравнивают измеренные значения температур с заданными, определяют режим работы электропривода поворота и в режиме разгона снижают величину его стопорного тока, а в режиме торможения поддерживают максимальную величину стопорного тока.
Способ осуществляется следующим образом.
При легких условиях эксплуатации нагрев главных электроприводов экскаватора не превышает допустимого значения. Сигналы с термодатчиков 8, 11 и 15 не превышают запирающего потенциала порогового элемента 9 и напряжение с его выхода, поступающее на силовой вход ключа 10, равно нулю..,,
Привод поворота обеспечивает при этом реализацию максимального ускорения или замедления платформы, ограниченных услося величина ускорения платформы экскаватора в режиме разгона при повороте в забой.
В конце процесса разгона ток якоря двигателя поворота уменьщается до весьма малого значения, зависящего от момента сил статического сопротивления механизма поворота. При этом напряжение на выходе датчика 33 тока становится меньше напряжения пробоя стабилитрона 31, исчезает сигнал на входе 27 логического элемента 20, напряжения на выходе логического элемента 19 становится равным нулю, ключ 10 размыкается, т. е. восстанавливается максимальная величина напряжения ограничения регулятора 3. Следовательно, в установившемся режиме работы привода поворота уставка регулятора 5 тока имеет максимальное значение.
В режиме разгона в противоположном направлении, т. е. при повороте на выгруз- 45 ку, схема работает аналогично описанному, но в прямом направлении оказываются включенными диоды 25 и 30, а диоды 24 и 29 включены при этом в обратном направлении. Поэтому появляется сигнал на выходе логического элемента И 21, следовательно, на выходе логического элемента ИЛИ 19. Ключ 10 замыкается и при наличии напряжения на выходе порогового элемента 9 происходит уменьщение напряжения ограничения регулятора 3.
В режимах торможения поворотной платформы полярности сигналов датчиков напряжения 26 и тока 33 не совпадают. Поэтому в прямом направлении оказываетВИЯМИ механической прочности и перегрузочной способности двигателей поворота.
При перегреве одного из главных электроприводов сигнал с соответствующего термодатчика превышает запирающий потенциал порогового элемента 9. При этом на выходе порогового элемента 9 появляется напряжение, поступающее на силовой вход замыкающего аналогового кдюча 10.
В режиме разгона полярности сигналов
датчиков напряжения 26 и тока 33 совпалятора 3 ЭДС, определяющее установку ре- гулятора 5 тока, благодаря чему понижаетуменьщается напряжение ограничения регу
0
,
ся величина ускорения платформы экскаватора в режиме разгона при повороте в забой.
В конце процесса разгона ток якоря двигателя поворота уменьщается до весьма малого значения, зависящего от момента сил статического сопротивления механизма поворота. При этом напряжение на выходе датчика 33 тока становится меньше напряжения пробоя стабилитрона 31, исчезает сигнал на входе 27 логического элемента 20, напряжения на выходе логического элемента 19 становится равным нулю, ключ 10 размыкается, т. е. восстанавливается максимальная величина напряжения ограничения регулятора 3. Следовательно, в установившемся режиме работы привода поворота уставка регулятора 5 тока имеет максимальное значение.
В режиме разгона в противоположном направлении, т. е. при повороте на выгруз- 5 ку, схема работает аналогично описанному, но в прямом направлении оказываются включенными диоды 25 и 30, а диоды 24 и 29 включены при этом в обратном направлении. Поэтому появляется сигнал на выходе логического элемента И 21, следовательно, на выходе логического элемента ИЛИ 19. Ключ 10 замыкается и при наличии напряжения на выходе порогового элемента 9 происходит уменьщение напряжения ограничения регулятора 3.
В режимах торможения поворотной платформы полярности сигналов датчиков напряжения 26 и тока 33 не совпадают. Поэтому в прямом направлении оказывается включенным только один из диодов во входной цепи элемента И 20 и один из диодов во входной цепи элемента И 21, т. е. напряжение на выходе этих элементов, а также на выходе элемента ИЛИ 19 равно нулю, ключ 10 разомкнут, на выходе регулятора 3 имеется максимальное напряжение ограничения, которое обеспечивает максимальную величину тормозного момента двигателя поворота независимо от наличия либо отсутствия напряжения на выходе порогового элемента 9.
Формула изобретения Способ управления электроприводами одноковшового экскаватора, включающий
задание допустимых значений перегрева электроприводов подъема, поворота и напора экскаватора, измерение текущей температуры этих приводов, сравнение измеренных значений температур с заданными и изменение величины стопорного тока привода поворота при превыщении заданного, отличающийся тем, что, с целью повышения надежности управления за счет исключения аварийных режимов, определяют режим работы электропривода поворота и в режиме разгона снижают величину его стопорного тока, а в режиме торможения поддерживают максимальную величину стопорного тока.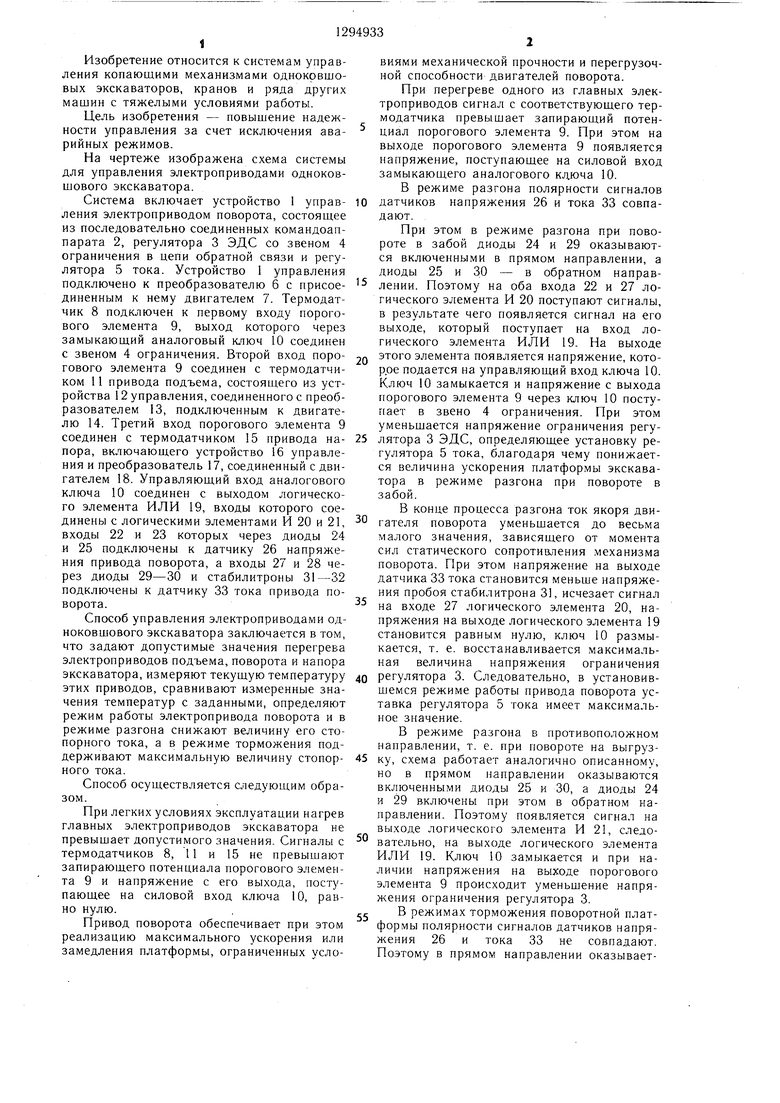
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивного управления электроприводами одноковшового экскаватора | 1986 |
|
SU1410257A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| Электропривод механизма поворота одноковшового экскаватора | 1986 |
|
SU1432149A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1988 |
|
SU1588846A2 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1985 |
|
SU1283314A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1627622A1 |
Изобретение относится к системам управления копаюш,ими механизмами одноковшовых экскаваторов и позволяет повысить надежность управления за счет исключения аварийных режимов. Для этого задают допустимые значения перегрева электроприводов подъема, поворота и напора экскаватора и сравнивают их с измеренными значениями текушей т-ры этих приводов. При превышении текушим значением т-ры заданного значения изменяют величину стопорного тока привода поворота. При этом в режиме разгона величину стопорного тока снижают, а в режиме торможения под- держивают его максимальную величину. 1 ил. ю ;0 СО со со
| Крайцберг М | |||
| И | |||
| Электроприводы строительных машин и механизмов | |||
| Гос- энергоиздат, 1958, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
