1 со Nd кд
4ii
О
в
Изобретение относится к угольной промьшшенности и может быть использовано при отработке лав с применением механизированных крепей.
Целью изобретения является повышение надежности работы путем предотвращения разворота секций механизированной крепи в плоскости пласта при передвижке,
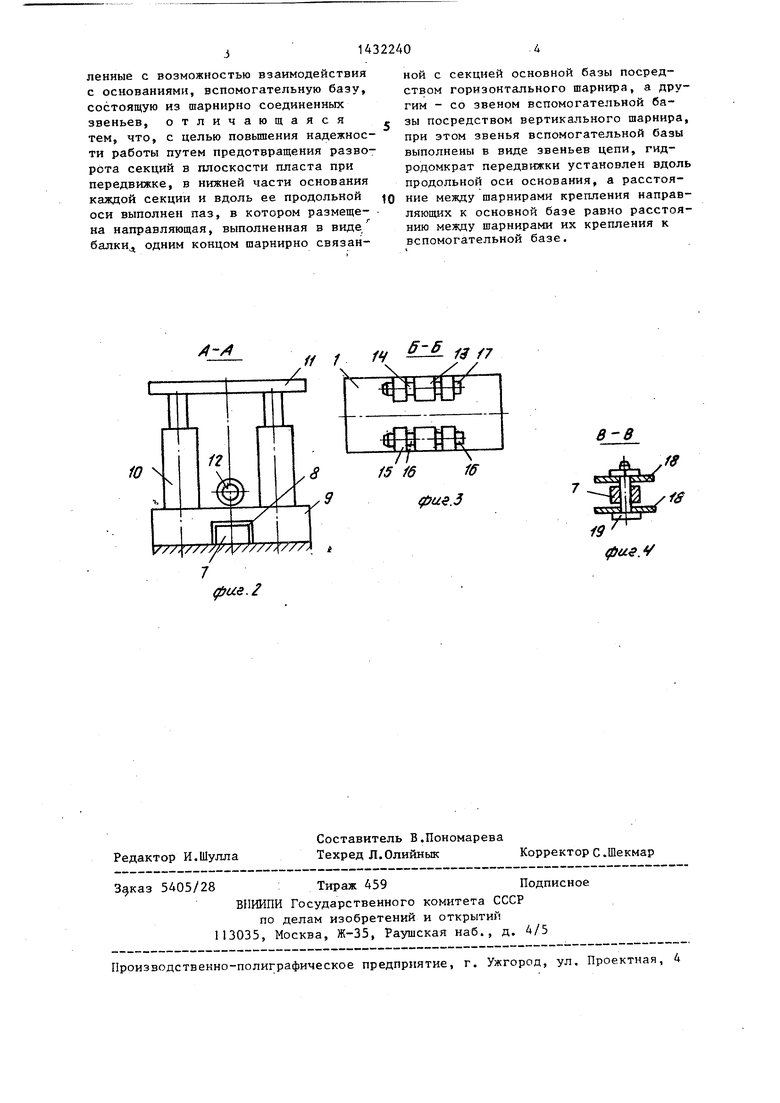
На фиг. 1 изображена схема крепи в исходном положении; на фиг. 2 - разрез А-А на фиг. 1 (секция крепи)j на фиг. 3 - разрез Б-Б на фиг. 1 (крепление гидродомкрата передвиже- ния и направляющей секции к основной ЬазёТ; на фиг. 4 - разрез В-В на фиг. 1 (крегшение направляющих секций крепи со звеном вспомогательной базы)
Механизированная крепь состоит из секций 1 основной базы 2, звеньев 3 вспомогательной базы 4, которая выполнена из звеньев цепи, и секций 5 механизированной крепи, Секции 1 основной базы связаны между собой связями 6, а со звеньями 3 вспомогательной базы, расположенной за посадочной частью крепи,- с помощью направляющих 7 секций крепи, вьтолненных в виде балок, расположенных в пазу 8, вы- полненном внизу основания 9 секции крепи вдоль ее продольной оси, Направ лякщие 7 одними концами шарнирно связаны с секцией t основной базы посредством горизонтального шарнира, а другими - со звеном 3 вспомогатель- ной базы посредством вертикального шарнира. Расстояние между шарнирами крепления направляющих к основной базе равно расстоянию между шарнирами их крепления к вспомогательной базе. Основание 9 секции крепи с помощью четьфех стоек 10 двойной раз- движности связано с перекрытием 11.
Передвижение на забой основной базы 2 с исполнительным органом (не по- казан) и подтягивание к забою секций 5 крепи осуществляются гидродомкратами 12 передвижения.
Гидродомкрат 12 передвижения расположен сверху основания 9 секции крепи вдоль ее продольной оси и шарнирно связан одним концом с секциями основной базы, а другим - с основанием 9 крепи. На фиг. 3 показана секция 1 основной базы с закрепленньми элементами 13 и щелями 14 между ними - сверху, элементами 15 и щелями 16 между ними - внизу, служащими для крепления соответственно гидро
«
5
n 5 5
5
0
0
домкратов 12 передвижения и направляющих 7 секций 5 крепи. В щели 14 и. 16 входят элементы соответственно направляющих 7 крепи и гидродомкратов 12 передвижения, которые закрепляются болтами 17.
Направляющие 7 крепи и гидродомкраты 12 передвижения в местах их связи с элементами 13 и 15 могут перемещаться только в вертикальной штос- кости. На фиг. 4 показано крепление направляющих 7 крепи со щечками 18 звеньев цепи вспомогательной базы 4 с помощью болтов 19.
Механизированная крепь работает следующим образом.
Для выдвижки базы 2 с исполнительным брганом в поршневые полости,каждого гидродомкрата 12 передвижения подается жидкость под давлением. При этом гидродомкраты раздвигаются, основная база 2 вместе с исполнительным органом, направляющим 7 и вспомогательной базой А начинает направленно перемещаться на забой. В это время секции 5 крепи расперты. В конце вьщвижки базы 2 (после полного хода штоков гидродомкратов 12) расстояние h выбирается и вспомогательная база 4 подвигается к завальной стороне секций 5 крепи. После окончания выдвижки на. забой базы 2 осуществляется раскрепление стоек 10 и подтягивание крепи к забою (к основной базе) с помощью гидродомкратов 12, при этом жидкость подается в штоковые полости гидродомкратов 12 и они сдвигаются. Затем распираются стойки крепи.
Предотвращение разворота секций в плоскости пласта достигается за счет жесткого крепления к секциям 1 направляющих 7 и гидродомкратов 12, применения калиброванных звеньев цепи 3 и параллельного перемещения направляющих 7 в пазах 8. Передвижка может осуществляться на требуемый шаг или фронтально на весь ход гидродомкратов 12.
Формула изобретения
Механизированная крепь, включающая секции, имеющие перекрытия и основания, связанные гидростойками, гидродомкраты передвижения, расположенные над основаниями и шарнирно связанные с основаниями и секциями основной базы, направляющие, установленные с возможностью взаимодействия с основаниями, вспомогательную базу, состоящую из шарнирно соединенных звеньев, отличающаяся тем, что, с целью повышения надежности работы путем предотвращения разворота секций в плоскости пласта при передвижке, в нижней части основания каждой секции и вдоль ее продольной оси выполнен паз, в котором размеще- на направляющая, выполненная в виде/ балки одним концом шарнирно связанной с секцией основной базы посредством горизонтального шарнира, а другим - со звеном вспомогательной базы посредством вертикального шарнира, при этом звенья вспомогательной базы выполнены Б виде звеньев цепи, гидродомкрат передвижки установлен вдоль продольной оси основания, а расстояние между шарнирами крепления направляющих к основной базе равно расстоянию между шарнирами их крепления к вспомогательной базе.
Изобретение относится к угольной промьшшенности и м.б. использовано при отработке лав с применением механизированных крепей. Цель - повышение надежности работы путем предотвращения разворота секций крепи в плоскости пласта при передвижке. Для этого секции 1 основной базы (Б) 2 связаны со звеньями 3 цепи вспомогательной Б 4 посредством направляющих (Н) 7. Каждая И 7 выполнена в виде балки и размещена в пазу, расположенном в нижней части основания вдоль продольной оси секции 1. Н 7 с секцией 1 одним концом связана посредством горизонтального шарнира (Ш), а другим со звеньями 3 Б 4 - посредством вертикального Ш. Расстояние между Ш крепления Н 7 к оси Б 2 равно расстоянию между Ш их крепления к. Б 4. Передвижение Б 2 на забой с исполнительным органом осуществляется гидродомкратом передвижки (ГДП), , установленным вдоль продольной оси основания. При раздвижке ГДП перемещаются Б 2 вместе с Н 7, а также Б 4. Секции 5 крепи в это время распираются. Наличие Н 7 и ГДП, а также звеньев 3 цепи предотвращает разворот секций в плоскости пласта. 4 ил. (Л
/l-/t
В-8
7 r «я
i3 //
фи$.У
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ НЕСТАЦИОНАРНОЙ ТЕПЛОПРОВОДНОСТИ | 0 |
|
SU174383A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Заявка ФРГ № 3041101, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Механизированная крепь | 1983 |
|
SU1254166A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
