зг гв
я
(/)
zt
плунжеру электромагнита. Электромагнит неподвижно закреплен в поршне. Г имеет несамотормозящую резьбу и взаимодействует с винтом 10, неподвижно закрепленным на крьппке 11 полого цилиндра 12, установленного на башмаках 18, поджатых пружинами 19с возможностью перемещения относительно корпуса 21. ЦИЛИНДР 12 имеет ребра 22, 23 переменной длины, расположенные в одной плоскости с ребрами 24, 25 переменной длины корпуса 21. На ребрах 22, 23 закреплены кольце-, вые мембраны 26, 27, которые с ребрами 24, 25 корпуса 21 образуют вспомогательные камеры 28, 29, 30, обеспечивающие дополнительное усилие на шток 1. 1 з.п. ф-лы, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ГРУЗОВЫХ РЕЖИМОВ ТОРМОЖЕНИЯ ГРУЗОВОГО ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2636232C2 |
| Регулятор давления в пневматическом тормозном приводе транспортного средства | 1983 |
|
SU1122530A1 |
| АВТОРЕГУЛЯТОР ГРУЗОВОГО РЕЖИМА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2322364C1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2174185C2 |
| Устройство для калибровки полых изделий | 1981 |
|
SU969355A1 |
| Тормозной блок дискового тормоза железнодорожного транспортного средства | 2019 |
|
RU2780499C2 |
| РЕГУЛЯТОР ДАВЛЕНИЯ МНОГОФУНКЦИОНАЛЬНЫЙ | 2013 |
|
RU2526501C1 |
| Устройство для резки заготовок на кольца | 1990 |
|
SU1736717A1 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| Машина для контактной точечной сварки | 1983 |
|
SU1110577A1 |
Изобретение позволяет расширить функциональные возможности привода за счет передачи на шток максимального усилия при прямом и обратном ходе. На штоке 1 неподвижно закреплен поршень, на к-ром установлена гайка (Г). Г снабжена механизмом фиксации, состоящим из фиксатора, к-рый постоянно поджимается пружиной к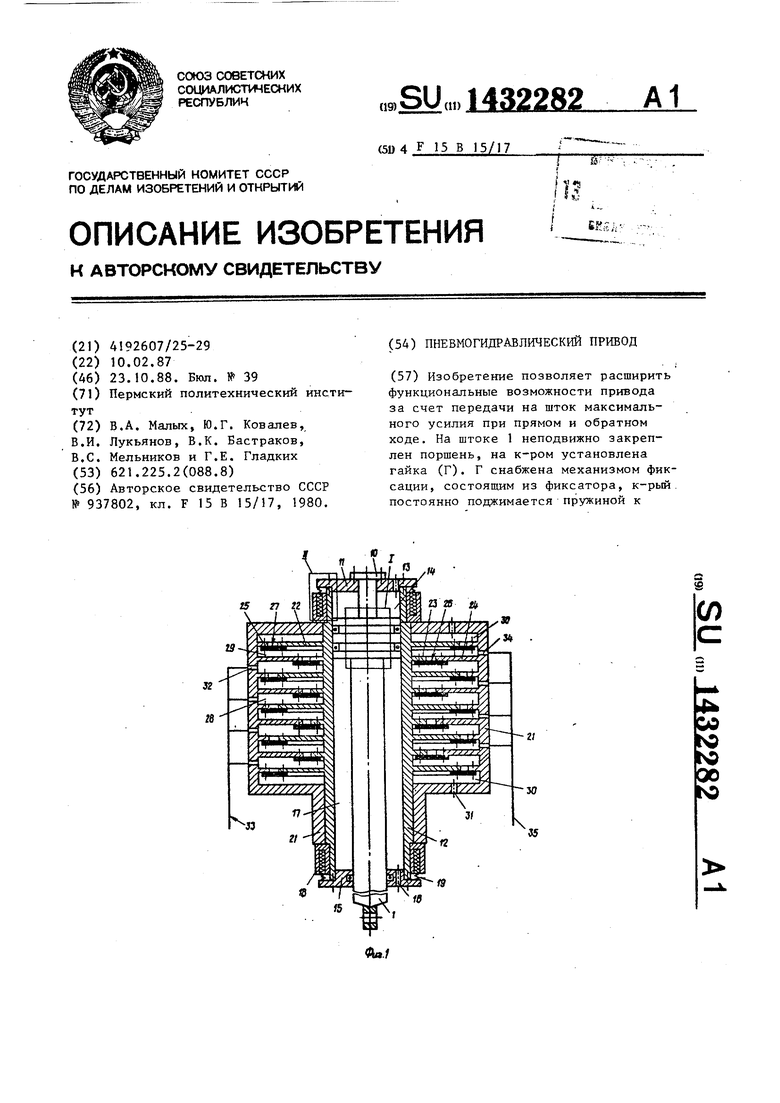
1
Изобретение относится к машиностроению, в частности к пневматическим и гидравлическим исполнительным механизмам с прямолинейным ходом штока, и может быть использовано в при- водах машин.
Цель изобретения - расширение функциональных возможностей за счет передачи на шток максимального усилия привода при прямом и обратном ходе.
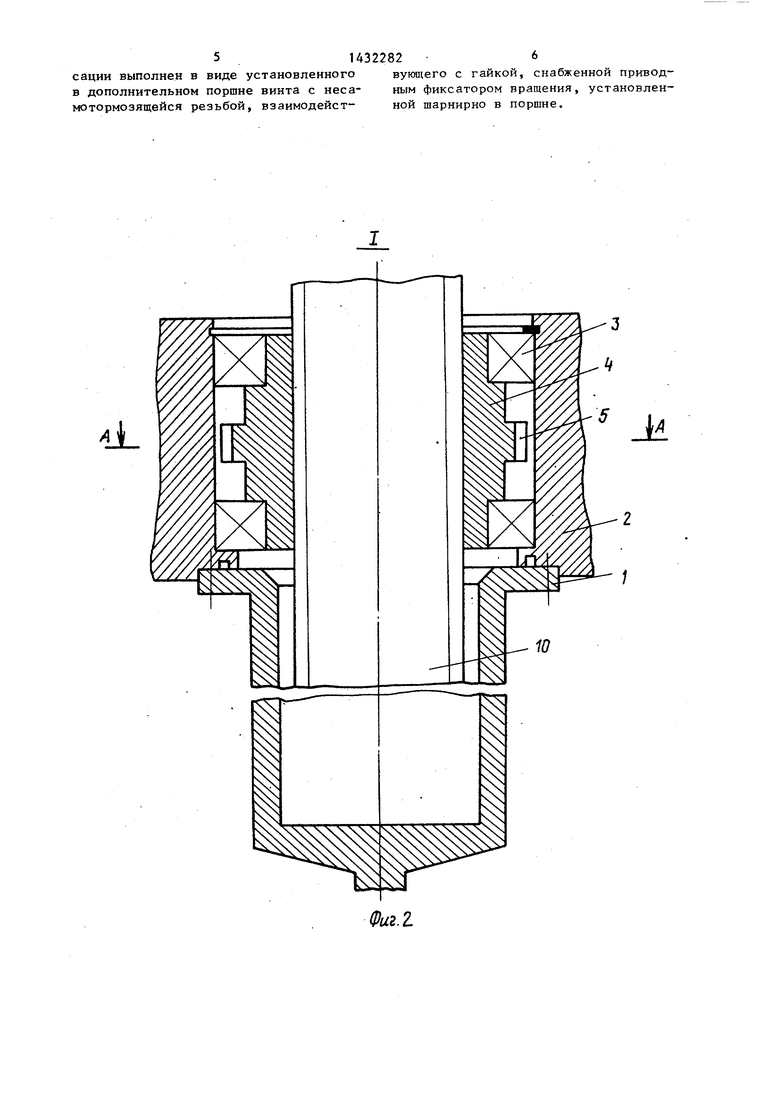
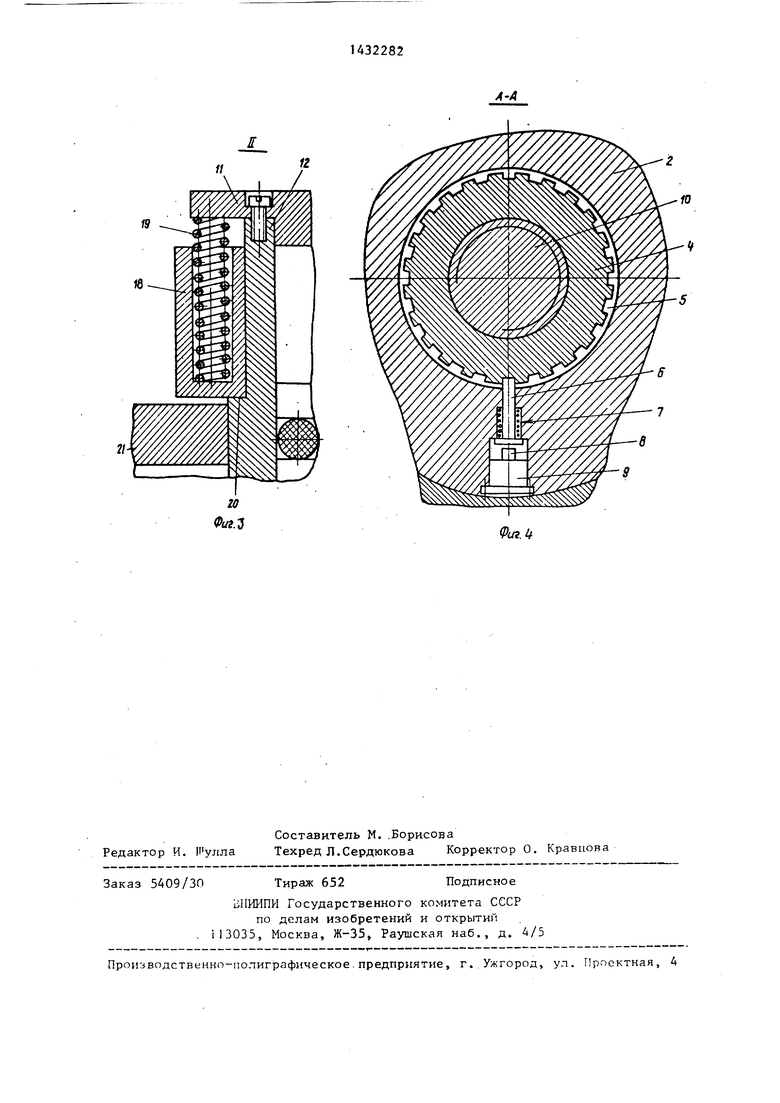
На фиг. 1 представлен пневмогид- равлический привод, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг.З- узел II на фиг. 1; на фиг. 4 - разрез А-А на фиг. 2.
Цривод содержит пустотелый шток 1 с закрепленным на нем неподвижно поршнем 2, в котором с возможностью вращения, в радиально-упорных подшипниках 3 установлена гайка 4 с вьгфре- зерованными на ее венце пазами 5. Гайка 4 снабжена приводным фиксато- «ром вращения, состоящим из фиксатора 6, который постоянно-поджимается пружиной 7 к плунжеру 8 электромагнита 9. Вместо электромагнита 9 может быть применен пневматический либо гидравлический исполнительный механизм. Электропроводы (не показаны) электромагнита 9 вьшедены наружу через от- верстие (не показано) штока 1. Электромагнит 9 неподвижно закреплен в поршне 2. Гайка 4 имеет несамотормозящую резьбу и взаимодействует с винтом 10, неподвижно закрепленным на крышке 11 полого цилиндра 12. Шток 1 зафиксирован от проворота относительно цилиндра 12.
Цилиндр 12 выполняет функции гильзы дпя поршня 2 со штоком 1. На одном из торцов цилиндра 12 закреплена
5
5
0 30 35
40
5
крьш1ка 11 с отверстием 13 для подвода воздуха в поршневую камеру 14, а на другом торце - крышка 15 с отверстием 16 для подвода воздуха в штоко- вую камеру 17. На цапфах цилиндра 12 размещень оппозитно с возможностью осевого перемещения подпружиненные башмаки 18, которые пружинами 19 поджаты к буртикам 20 цилиндра 12 так, что последний установлен в корпусе 21 с возможностью перемещения относительно корпуса 21 только преодолевая усилие пружины 19. Усилие, раз- вив.аемое пружинами 19, должно, быть больше усилия на штоке 1 при подаче воздуха в поршневую камеру 14. На цилиндре 12 жестко закреплен ряд чередующихся больших 22 и малых 23 ребер. Корпус 21 имеет ряд чередующихся больших 24 и малых 25 ребер, расположенных в одной плоскости с ребрами 22 и 23 цилиндра 12. На ребрах 23 по внутреннему периметру герметично закреплены малые резиновые кольцевые мембраны 26, которые по наружному периметру герметично закреплены на ребрах 24 корпуса 21. На ребрах 22 по внутреннему диаметру герметично закреплены большие ре- зинОвые кольцевые мембраны 27, которые по наружному периметру герметично закреплены на ребрах 25 корпуса 21.
Таким образом, мембраны 26 и 27, ребра 22-25, корпус 21 и цилиндр 12 образуют ряд смежных вспомогательных камер - камеры прямого хода 28 и обратного хода 29 и холостые камеры 30, которые соединены с атмосферой посредством отверстий 31. Камеры 28 посредством отверстий 32 сообщены с i
коллектором 33, а камеры 29 посредством отверстий 34 - с коллектором 36, Если по условиям работы необходимо ступенчатое наращивание усилия от мембранного привода, камеры 28 и 29 могут иметь индивидуальные трубопроводы для подачи управляемого сигнала (сжатого воздуха). При подаче сжатого воздуха в камеры 28 цилиндр 12 совершает относительно корпуса 21 прямой ход за счет того, что эффективная Площадь ребер 22 больше эффективной площади ребер 23. При подаче сжатого воздуха в камеру 29 происходит обратный ход цилиндра 12.
Привод работает следующим образом.
При подаче сжатого воздуха через отверстие 13 в поршневую камеру 14 шток 1 с поршнем 2- совершает прямой ход, т.е. перемещается вниз (фиг. 1) до тех пор, когда сопротивление перемещению рабочего органа (не показан), связанного кинематически со щтоком, превысит усилие, развиваемое поршнем 2, после чего происходит остановка штока 1. При этом цилиндр 12, к которому прилагается одинаковая со штоком 1 за счет давления сжатого воздуха нагрузка, не перемещается, так как усилие пружин 19 каждого из башмаков 18 превьш1ает усилие, действующее на цилиндр 12.
При прямом ходе штока 1 воздух из штоковой камеры 17 через отверстие 16 стравливается в атмосферу. В момент перемещения штока 1 относительно цилиндра 12 электромагнит 9 обесточен, а фиксатор 6 под действием пружины 7 вьшеден из зацепления с. пазами 5 гайки 4. Следовательно, гайка 4 при перемещении щтока 1 свободно вращается в поршне 2 на подшипниках 3. Для создания большого усилия н.а штоке 1 при прямом ходе, т.е. вниз (фиг. 1), подают управляющий сигнал на электромагнит 9, который, воздействуя на фиксатор 6, вводит его в один из пазов гайки 4, П1 ерьшают пода1чу сжатого воздуха в камеру 14 и сообщают последнюю с атмосферой. По коллектору 33 через отверстия 32 в камеры 28 подают сжатый воздух, и на цилиндр 12 начинает действовать сила, направленная в сторону прямого хода, т.е. вниз (фиг. 1). Сила направлена вниз вследствие того, что эффективные площади ребер 22 цилиндра
12 больше эффективных площадей ребер 23 цилиндра 12. Если фиксатор 6 не вошел в один из паэов 5 гайки 4, происходит определенное осевое смещение вниз цилиндра I2 относительно неподвижного штока 1 под действием сжатого воздуха, поданного в камеры 28, вследствие чего гайка 4 начинает соQ вершать медленное вращательное движение, фиксатор б входит в соседш.й с ним паз 5 гайки 4, после чего перемещение цилиндра 12 относительно штока 1 заканчивается и усилие от мембран5 ного привода через цилиндр 12, кръшг- ку 11, винт 10, гайку 4 и радиально- упорные подшипники 3 передается на шток 1. Если рабочий орган после приложения к штоку 1 усилия от мембран0 ного привода начинает перемещаться вниз (фиг. 1), верхние башмаки 18 перемещаются относительно цилиндра 12 и в конце хода последнего поджимаются к крьш1ке 1 1 . Работа привода
5 при обратном ходе штока 1 и цилиндра 12 аналогична работе привода при прямом ходе. При этом сжатый воздух для перемещения штока 1 вверх (фиг.) подается в штоковую камеру 17, а для
0 перемещения в том же направлении цилиндра 12 сжатый воздух подается в камеры 29.
Формула изобретения
5
содержащий установленный в корпусе поршень со штоком с образованием рабочих камер и связанный при помощи
0 механизма фиксации с дополнительным поршнем, образующим вспомогательную камеру, отличающийся тем, что, с целью расширения функциональных возможностей за счет переда5 чи на шток максимального усилия привода при прямом и обратном ходе, дополнительный поршень выполнен в виде полого цилиндра с ребрами переменной длины и установлен на подпружиненных
0 башмаках с возможностью перемещения относительно корпуса, снабженного ребрами переменной длины, расположенными в одной плоскости с ребрами дополнительного поршня с закрепленными
5 на них кольцевыми мембранами с обра-i зованием вспомогательных камер.
сации выполнен в виде установленного вующего с гайкой, снабженной привод- в дополнительном поршне винта с неса- ным фиксатором вращения, установлен- мотормозящейся резьбой, взаимодейст- ной шарнирно в поршне.
А
Фиг. г
ff
19
la
Фиг.
| Гидроцилиндр | 1980 |
|
SU937802A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
