С/д ISS
Изобретение относится к измерительной технике,и может быть использовано для измерения углов поворота вала различных устройств
Целью изобретения является расширение диа11азо1га измерения.
Па фиг, нриведена нршщиниаль- ная схсма;,у-ст-ройства; па фиг. 2 - схема и диаграммы и myльcoв, поясняю щиа работу устройства при измерении полож1 тельных углов;, на фиг, 3 - то же, при измерении од-рнцательных углов.
Устройство содержит корпус 1, в котором размещены модулятор 2, синхронный двигатель 3 и два имнульсных датчика. Каждый из импульсных датчиков состоит из осветителя и фотонри- емника, например, из светодиода и фо тодиода. Первьй неподвижньп датчик 4 укреплен па корпусе 1 , вторсЗ:й подвижный датчик 5 укреплен па поворотной втулке 6,
Модулятор 2 выполнен в виде не- риодпческой штриховой меры. Все штрихи 7 меры идентичны 5 кроме одного штриха 8, имеющего большую, чем у ддзугих ширзшу. Оба импульагых датчика сопряжены штриховым полем меры. Поворотная втулка б размещена сооспо модулятору 2 и установлена па контро лируемьш вал 9„
В схеме обработки сигналов датчи ков устройства содержатся переключатель 10, амплитудный дискриминатор 11, блок 12 вычисления, блок 13 усреднения, блок 14 сравнения и регистратор 15,
Выводы импульсных датчиков 4 и 5 подключены к входам И, П-переключателя 10 соответстветпю, выходы перекл о чателя 10 И, П подключены к входу амплитудного дискриминатора I1, При отсутствии сигнала управлепия с блока 14 вход П соединен с выходом И, а вход П - с выходом П. При поступлени сигнала управления с блока сравнения и срабатывания переключателя 10 вход И соед1-1нен с выходом П, а вход П - с выходом П. Выходы амнли худного диск риминатора 11 соединены с входами блока 12 вычисления. Один выход блока вьгаисле ния соединен с блоком i 3 усреднения, а другой выход соединен с блоком 14 сравнения и регистратором 15. ПервьЕ пыход блока 14 сравнения соединен с регистратором 15 и управляющим входом переключателя 10, а
.
г
- JQ
|5 20 25о
35
50
второй выход - со входом Сброс блока 12 вычнсления. Выход блока 13 усреднения соединен с регистратором 15,
Устройство работает следующим образом.
Двигатель 3 приводит во вращение модулятор 2 с ПОСТОЯ1П1ОЙ скоростью. Штрихи модулятора при прохождении в рабочей зоне импульсных датчиков возбуждают в них электрические сигналы (импульсы). Импульсы от всех штрихов периодической меры одинаковы по своим параметрам, за исключением тех, которые возбуждены маркированным штрихом 8, Эти и myльcы отличаются от остальных по амплитуде,
В амплитудном дискриминаторе I происходит разделение потока импульсов по двум канам: по первого каналу следуют все импульсы без исключения - простые и маркированные 5 а по второму капалу - только маркированные (от штриха 8),
13ычисгп1тель состоит из двух каналов: первый канал построеп как счетчик целого числа импульсов т, поступивших с одпого из датчиков между маркированпы ш импульсами, приходЯ1ДИ- ми с пеподвг-Екного и подвижного датчиков - канал грубого отсчета (ГО),второй ка}1ал построеп как измеритель времегпсых интервалов между импульсами, поступающими с неподвижного и подвижного датчиков - канал точного отсчета (ТО),
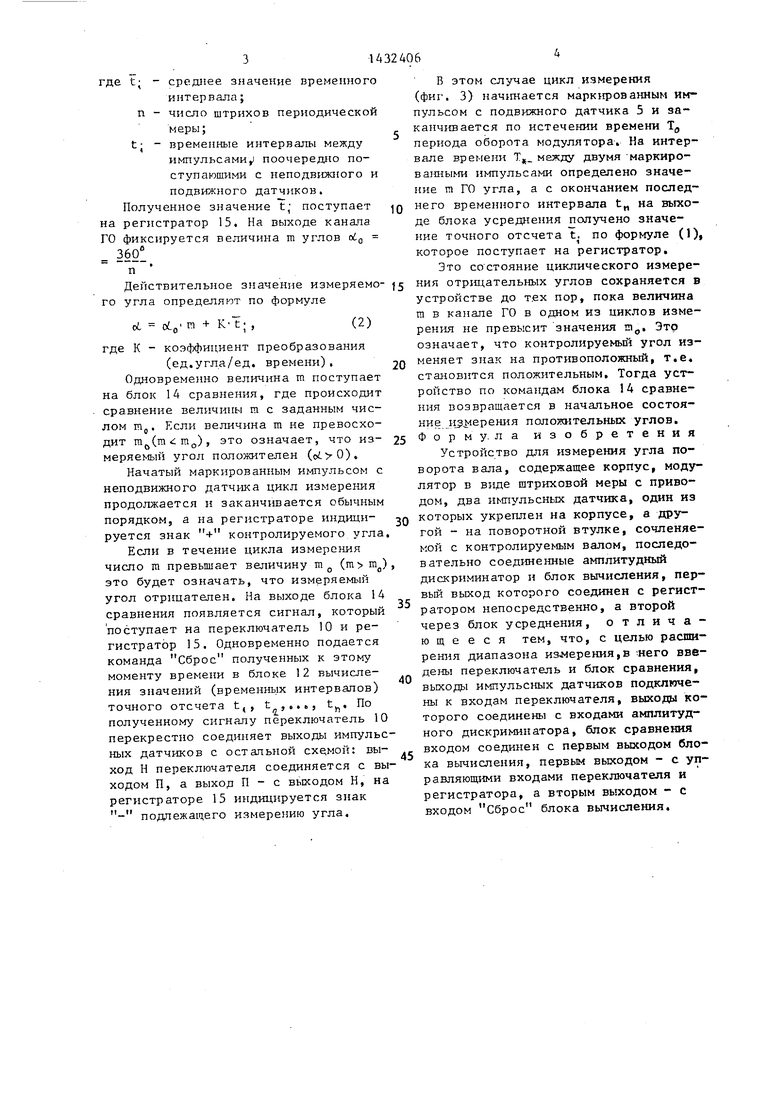
Па фиг. 2 и 3 обозначены: СО ,лод угловая скорость модулятора и ее направление; d + (PC-) - измеряемые угол поворота вала, совпадающий (несовпадающий) по направлению с движепием модулятора, т.е. положитель}П;.п1 (отрицательный) угол; 1 + ( временной интервал между двумя маркированными импульсами, соответствующей ве- личипе измеряемого угла; t,, t,,,,,, 11, - временпые интервалы между импульсами, поочередно поступающими с неподвижного и подвижного датчиков; tp - временно пптервал между двумя соседпт1ми импульсами с одноименного датчика; «- - обозначение маркированного импульса.
Выход капала ТО полключен к блоку 13 усреднения, на выходе которого формируется величина
t, - -1- У t
,1 .
(1)
где t; - среднее значение временного
интервала; п - число штрихов периодической
меры;
t; - временные интервалы между импульсами поочередно поступающими с неподвижного и подвижного датчиков. Полученное значение t, поступает на регистратор 15. На выходе канала ГО фиксируется величина га углов 360 п
В этом случае цикл измерения (фиг. 3) начинается марк1фованным импульсом с подвижного датчика 5 и заканчивается по истечении времени Т периода оборота модулятора. На интервале времени Т между двумя маркированными импульсами определено значение m ГО угла, а с окончанием последнего Bpet-ieHHoro интервала t на выходе блока усреднения получено значение точного отсчета t, по формуле (1), которое поступает на регистратор.
Это состояние циклического иэмере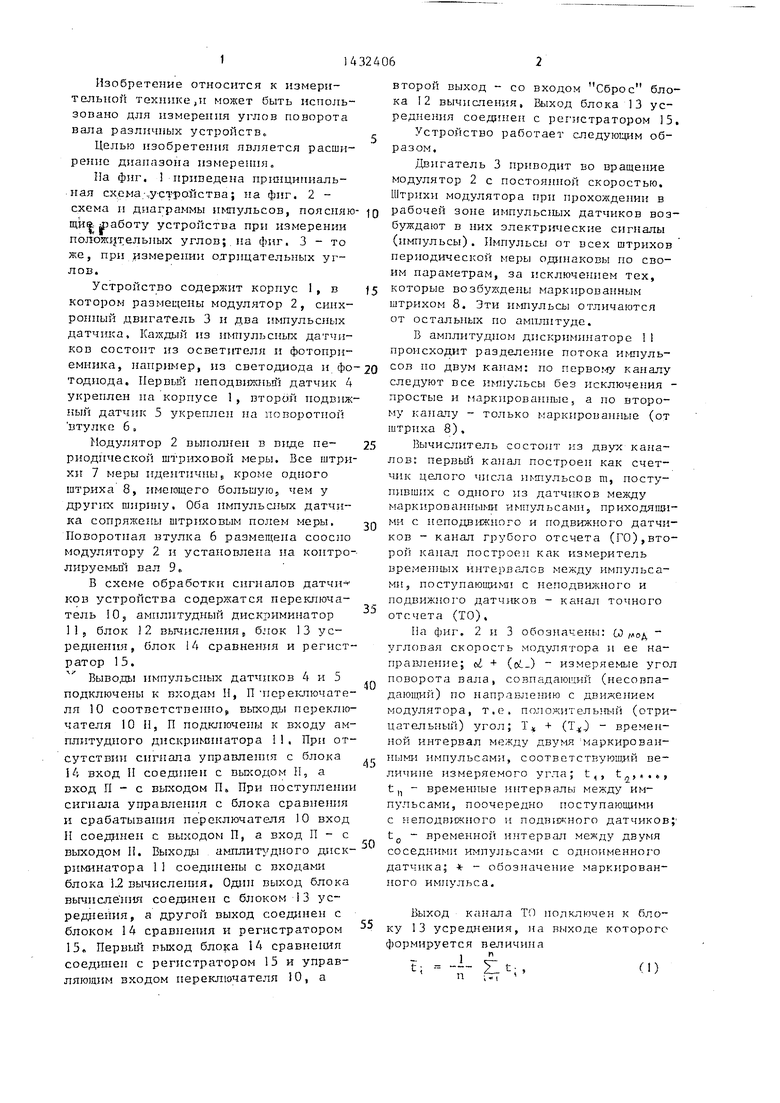
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла поворота вала | 1979 |
|
SU1023196A1 |
| Устройство для измерения угла поворота вала | 1984 |
|
SU1264340A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1990 |
|
RU2020408C1 |
| Устройство для измерения угла поворота вала | 1986 |
|
SU1372619A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| Устройство для контроля угла пово-POTA плАТфОРМы | 1979 |
|
SU796655A1 |
| Цифровой тахометр | 1983 |
|
SU1348735A1 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |
| Способ измерения угла поворота вала | 1981 |
|
SU1084601A2 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ ПО ИНТЕНСИВНОСТИ АМПЛИТУДНЫХ ФЛЮКТУАЦИЙ | 2010 |
|
RU2425395C2 |
Нзобретенне относится к измерп- тельной технике. Цель изобретания - .расширение диапазона нзмеренлл. Вращающийся с постоянной скоростью модулятор 2, выполненный в виде штриховой меры, возбуждает два датчика: неподвижный 4 и подвижньш 5, связанный с контролируемым объектом. Один из штрихов меры отличается от остальных и вызывает появление на выхо,.де датчиков особых маркированных импульсов. Блок вычисления 12, связанный с датчиками через переключатель 1 О и.амплитудный дискриминатор 11, формирует выходной сигнал как сумму грубого и точного отсчетов угла; Грубый отсчет соответствует временному интервалу между марк1фованными юл- пульсами датчиков, точный - усредненному за оборот значению фазового сдвига всех пар импульсов, формируемых датчиками.Блок сравнения 14 сравнивает зььачение грубого отсчета с некоторым предельным значением и осуществляет через переключатель 10 коммутацию сигналов датчиков на входе измерительного канала. Состояние переключателя 10 определяет знак измеряемого угла, который учитывается регистратором 15. 3 ил. (Л
Действительное значение измеряемо- 5 отрицательных углов сохраняется в
го угла определяют по формуле oi + K l; ,
где К - коэффициент преобразования (ед.угла/ед. времени).
Одновременно величина m поступает на блок 14 сравнения, где происходит сравнение величины m с заданным числом lUj. Если величина m не превосходит т(), это означает, что измеряемый угол положителен ().
Начатый маркированным импульсом с неподвижного датчика цикл измерения продолжается и заканчивается обычным порядком, а на регистраторе индицируется знак + контролируемого угла
Если в течение цикла измерения число га превышает величину т (т т) это будет означать, что измеряемь:й угол отрицателен. На выходе блока 14 сравнения появляется сигнал, который поступает на переключатель 10 и регистратор 15. Одновременно подается команда Сброс полученных к этому моменту времени в блоке 12 вычисления значений (временных интервалов) точного отсчета t, , t ,..,j t. По полученному сигналу переключатель 10 перекрестно соединяет выходы импульсных датчиков с остальной схемой: вы- ход И переключателя соединяется с выходом П, а выход П - с выходом Н, на регистраторе 15 индицируется знак - подлежащего измерению угла.
20
25
30
, .-
35
40
устройстве до тех пор, пока величина m в канале ГО в одном из циклов измерения не превысит значения п. Это означает, что контролируемьш угол изменяет знак на противоположный, т.е. становится положительным. Тогда устройство по командам блока 14 сравнения возвращается в начальное состояние и ерения положительных углов. Форму, л а изобретения
Устройство для измерения угла поворота вала, содержащее корпус, модулятор в виде штриховой меры с приводом, два импульсных датчика, один из которых укреплен на корпусе, а другой - на поворотной втулке, сочленяемой с контролируемым валом, последовательно соединенные амплитудный дискриминатор и блок вычисления, первый выход которого соединен с регистратором непосредственно, а второй через блок усреднения, отличающееся тем, что, с целью расширения диапазона измерения,в «его введены переключатель и блок сравнения, выходы импульсных датчиков подключены к входам переключателя, выходы которого соединены с входами амплитудного дискриминатора, блок сравнения входом соединен с первым выходом блока вычисления, первьм выходом - с управляющими входами переключателя и регистратора, а вторым выходом - с входом Сброс блока вычисления.
а
:
Фи.2
Г
fe.J
| Устройство для измерения угла поворота вала | 1979 |
|
SU1023196A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
