/7
(Л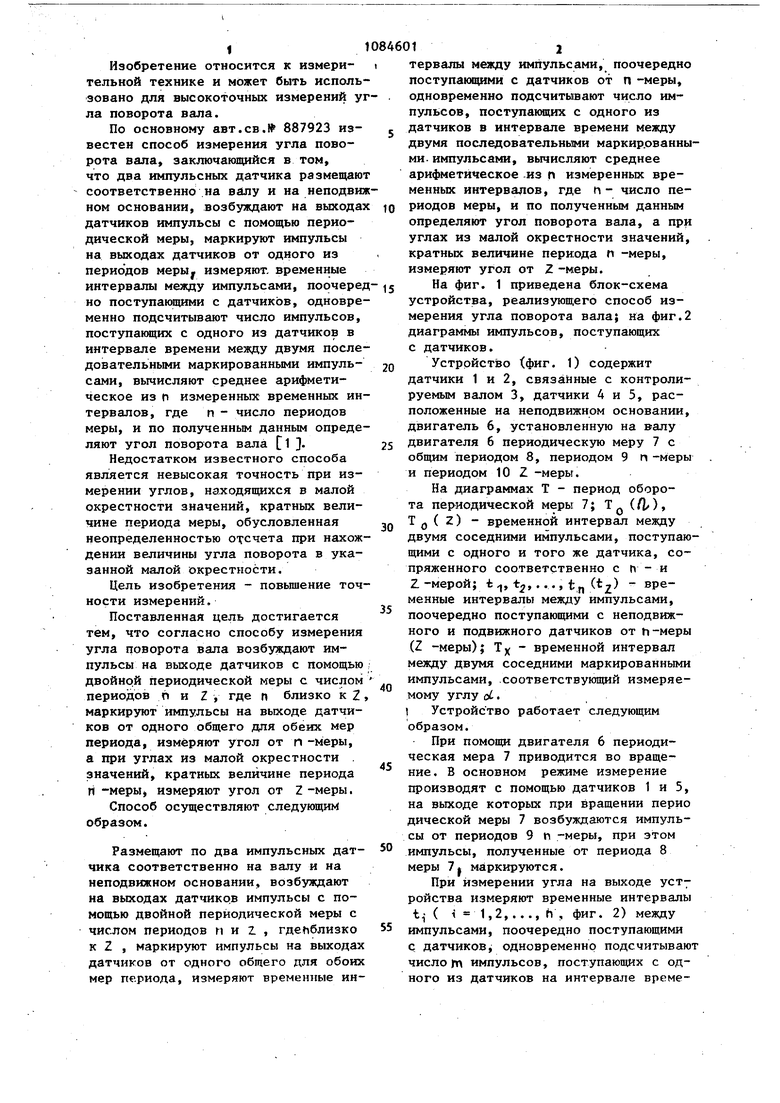
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угла поворота вала | 1978 |
|
SU887923A1 |
| Устройство для измерения угла поворота вала | 1986 |
|
SU1372619A1 |
| Устройство для измерения угла поворота вала | 1984 |
|
SU1264340A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1990 |
|
RU2020408C1 |
| Устройство для измерения угла поворота вала | 1986 |
|
SU1432406A1 |
| Устройство для измерения угла поворота вала | 1979 |
|
SU1023196A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| Способ измерения угла поворота вала | 1982 |
|
SU1084602A2 |
| Цифровой тахометр | 1983 |
|
SU1348735A1 |
| Устройство для контроля угла пово-POTA плАТфОРМы | 1979 |
|
SU796655A1 |
СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА по авт. св. № 887923, отличающийся тем, что. . ,, Г 1 U liW ,j { J i-j -greyA с целью повышения точности измерений, возбуждают импульсы на выходе датчиков, с помощью двойной периодической меры с числом периодов п и Z где п близко к Z , маркируют импульсы на выходе датчиков от одного общего для обоих мер периода, измеряют угол от п -меры,, а при углах из малой окрестности значений, кратных величине периода п -меры, измеряют угол от Z -меры.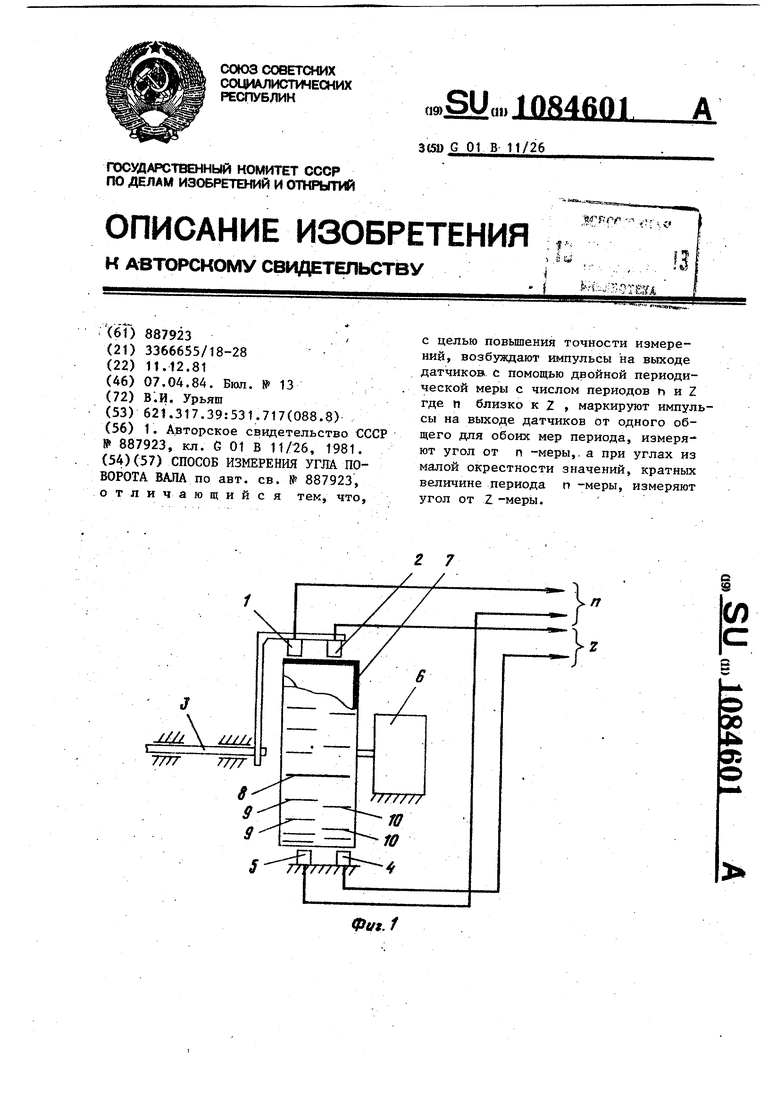
эо
4
X
фух. 1
Изобретение относится к измери- i тельной технике и может быть использовано для высокоточных измерений угла поворота вала.
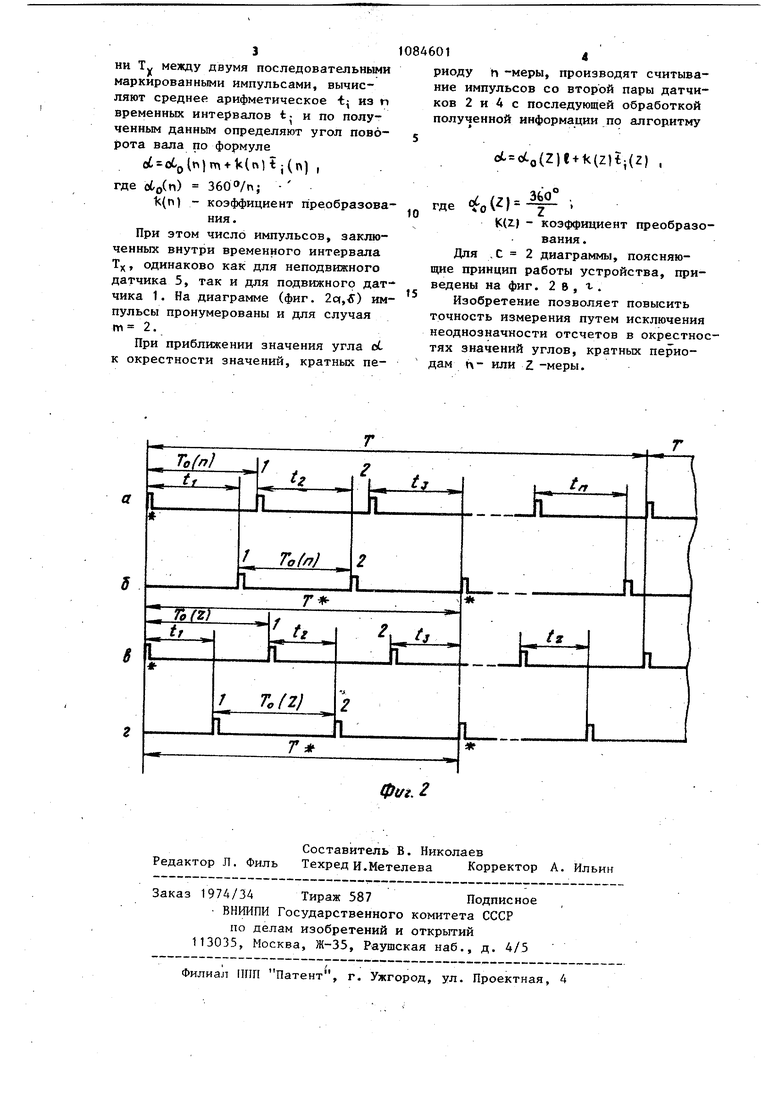
По основному авт.св. 1 887923 известен способ измерения угла поворота вала, заключающийся в том, что два импульсных датчика размещают соответственно на вдлу и на неподвижном основании, возбуждают на выходах ю датчиков импульсы с помощью периодической меры, маркируют импульсы на выходах датчиков от одного из периодов мерЫ| измеряют, временные интервалы между импульсами, поочере но поступающими с датчиков, одновре менно подсчитывают число импульсов, поступающих с одного из датчиков в интервале времени между двумя после довательными маркированными импульсами, вычисляют среднее арифметическое из п измеренных временных ин тервалов, где п - число периодов меры, и по полученным данным опреде ляют угол поворота вала 1 . Недостатком известного способа является невысокая точность при измерении углов, находящихся в малой окрестности значений, кратных величине периода меры, обусловленная неопределенностью отсчета при нахож дении величины угла поворота в указанной малой окрестности. Цель изобретения - повышение точ ности измерений. Поставленная цель достигается тем, что согласно способу измерения угла поворота вала возбуждают импульсы на выходе датчиков с помощью двойной периодической меры с числом периодов п и Z , где п близко к 2 маркируют импульсы на выходе датчиков от одного общего для обеих мер периода, измеряют угол от п -меры, а при углах из малой окрестности . значений, кратных величине периода п -мерЫ) измеряют угол от Z-меры. Способ осуществляют следующим образом. Размещают по два импульсных датчика соответственно на валу и на неподвижном основании, возбуждают на выходах датчиков импульсы с помощью двойной периодической меры с числом периодов п w Z , гдеъблизко к 2 , маркируют импульсы на выходах датчиков от одного общего для обоих мер периода, измеряют временные интервалы между импульсами, поочередно поступающими с датчиков от п -меры, одновременно подсчитывают число импульсов, поступающих с одного из датчиков в интервале времени между двумя последовательными маркир.ованными. импульсами, вычисляют среднее арифметическое .из h измеренных временных интервалов, где п- число периодов меры, и по полученным данным определяют угол поворота вала, а при углах из малой окрестности значений. кратных величине периода п -меры, измеряют угол от 2 -меры. На фиг. 1 приведена блок-схема устройства, реализуюш;его способ измерения угла поворота вала; на фиг.2 диаграммы импульсов, поступающих с датчиков. Устройство (фиг. 1) содержит датчики 1 и 2, связанные с контролируемым валом 3, датчики 4 и 5, расположенные на неподвижном основании, двигатель 6, установленную на валу двигателя 6 периодическую меру 7 с общим периодом 8, периодом 9 п -меры и периодом 10 Z -меры. На диаграммах Т - период оборота периодической меры 7; ..(), Т л ( Z) - временной интервал между о двумя соседними импульсами, поступающими с одного и того же датчика, сопряженного соответственно с п - и Z -мерой; t , t,..., t п (t) - временные интервалы между импульсами, поочередно поступающими с неподвижного и подвижного датчиков от h-меры (Z -меры); Tj( - временной интервал между двумя соседними маркированными импульсами, .соответствующий измеряемому углу ol Устройство работает следующим образом. При помощи двигателя 6 периодическая мера 7 приводится во вращение. В основном режиме измерение производят с помощью датчиков 1 и 5, на выходе которых при вращении перио дической меры 7 возбуждаются импульсы от периодов 9 п -меры, при этом импульсы, полученные от периода 8 меры 7I маркируются. При измерении угла на выходе уст7 ройства измеряют временные интервалы t,- ( i 1,2, . .., h , фиг. 2) между импульсами, поочередно поступающими с датчиковj одновременно подсчитывают число )Trt импульсов, поступающих с одного из датчиков на интервале времени Tj между двумя последовательными маркированными импульсами, вычисляют среднее арифметическое t из п временных интервалов t- и по полученным данным определяют угол поворота вала по формуле
ot o6pln)rn + k(n) t j(n ,
где o6o(n) 360 /n; 4{n) - коэффициент преобразования.
При этом число импульсов, заключенных внутри временного интервала Т, одинаково как для неподвижного датчика 5, так и для подвижного дат чика 1. На диаграмме (фиг. 2cf,) им пульсы пронумерованы и для случая m 2.
При приближении значения угла оС к окрестности значений, кратных пе10846014
риоду h -меры, производят считывание импульсов со второй пары датчиков 2 и 4 с последующей обработкой полученной информации по алгоритму
ct (Z)l(Z)ti(2)
,. зьо ,
o.(2)
где
К(2.) - коэффициент преобразования .
Для .С 2 диаграммы, поясняющие принцип работы устройства, приведены на фиг. 2 В, г.
Изобретение позволяет повысить точность измерения путем исключения неоднозначности отсчетов в окрестностях значений углов, кратных периодам h- или Z -меры.
| Г | |||
| Способ измерения угла поворота вала | 1978 |
|
SU887923A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
