137
го сигнала с датчика 5 поступает ип- пульс, который приходит на второй вход блока 21 синхронизации. Срабатывает схема.совпадения, и блок 21 синхронизации выдает сигнал тревоги, который переключает блоки 17-19 на работу с Z-мерой, исключая возможность сбойных ситуаций, когда измеряемый угол попадает в окрестность значений,
19
кратных величине периода п-меры. Введение штриха 9, который шире остальных, позволило исключить ранее использовавшийся п-позиционный растр, закрепленный на поворотной втулке, сложный как в изготовлении, так и в выставке его на поворотной втулке, а следовательно упростить конструкцию преобразователя. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла поворота вала | 1984 |
|
SU1264340A1 |
| Устройство для измерения угла поворота вала | 1986 |
|
SU1432406A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| Устройство для измерения угла поворота вала | 1979 |
|
SU1023196A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1990 |
|
RU2020408C1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Цифровой тахометр | 1983 |
|
SU1348735A1 |
| Устройство для синхронизации часов по радиоканалу | 1983 |
|
SU1230442A2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| Устройство для контроля оптической передаточной функции оптических систем | 1988 |
|
SU1589099A1 |
Изобретение относится к измерительной технике и может быть исполь- эовано для высокоточного измерения угла поворота вала. Цель изобретения - упрощение конструкции цикличес кого время-импульсного преобразовате ля угла. Устройство содержит корпус 12 13 1, модулятор 2 с приводом 3, импульсные датчики 4-8, поворотную втулку 10, сочленяемую с входным валом П, причем на модулятор 2 нанесены п-мера 12 и z-мера 13, имеющие общий штрих 14, а также амплитудный дискриминатор 15, коммутатор 16, блок 17 измерения временных интервалов, блок 18 усреднения, блок 19 вычисления, регистратор 20, блок 21 синхронизации. Поставленная цель - упрощение конструкции преобразователя достигается тем, что на модулятор 2 нанесена однощтриховая шкала с штрихом 9, который расположен симметрично относительно общего штриха 14, Штрих 9 имеет больщую по сравнению с другими штрихами ширину и, проходя мимо датчика 8, возбуждает сигнал, который приходит на первый вход блока 21 синхронизации. Во время действия этос (Л cpuzl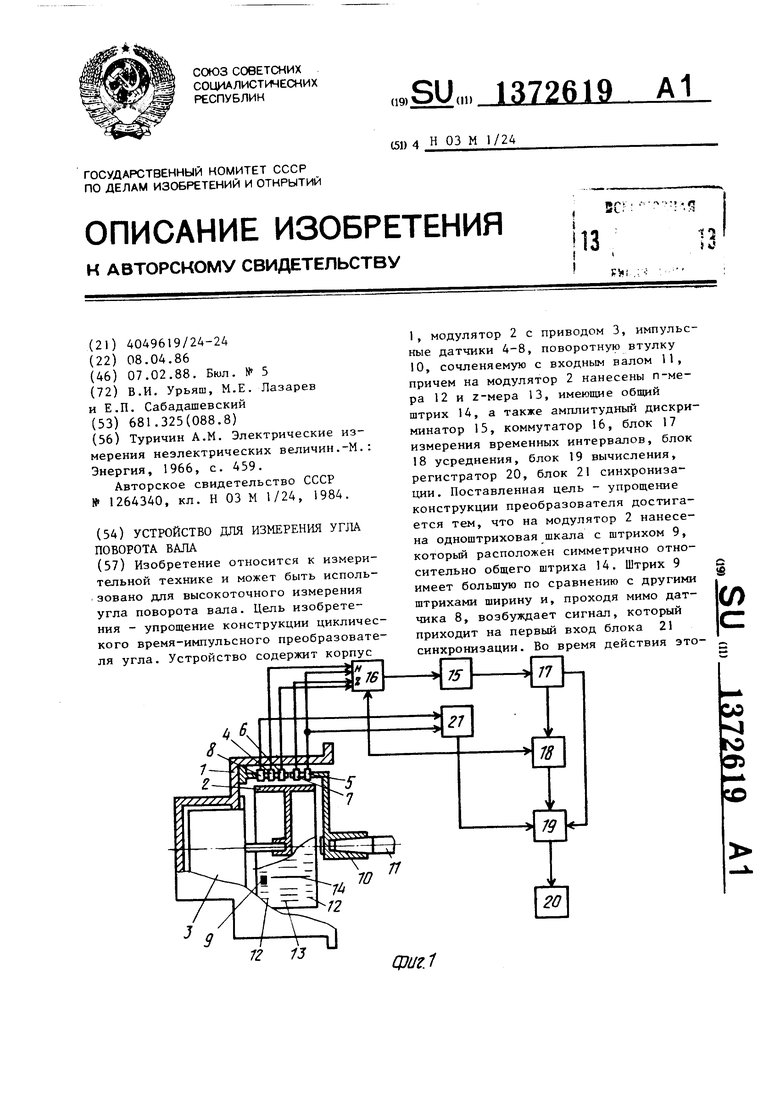
1
Изобретение относится к измерительной технике и может быть использовано для высокоточного измерения угла поворотного вала.
Цель изобретения - упрощение конструкции устройства.
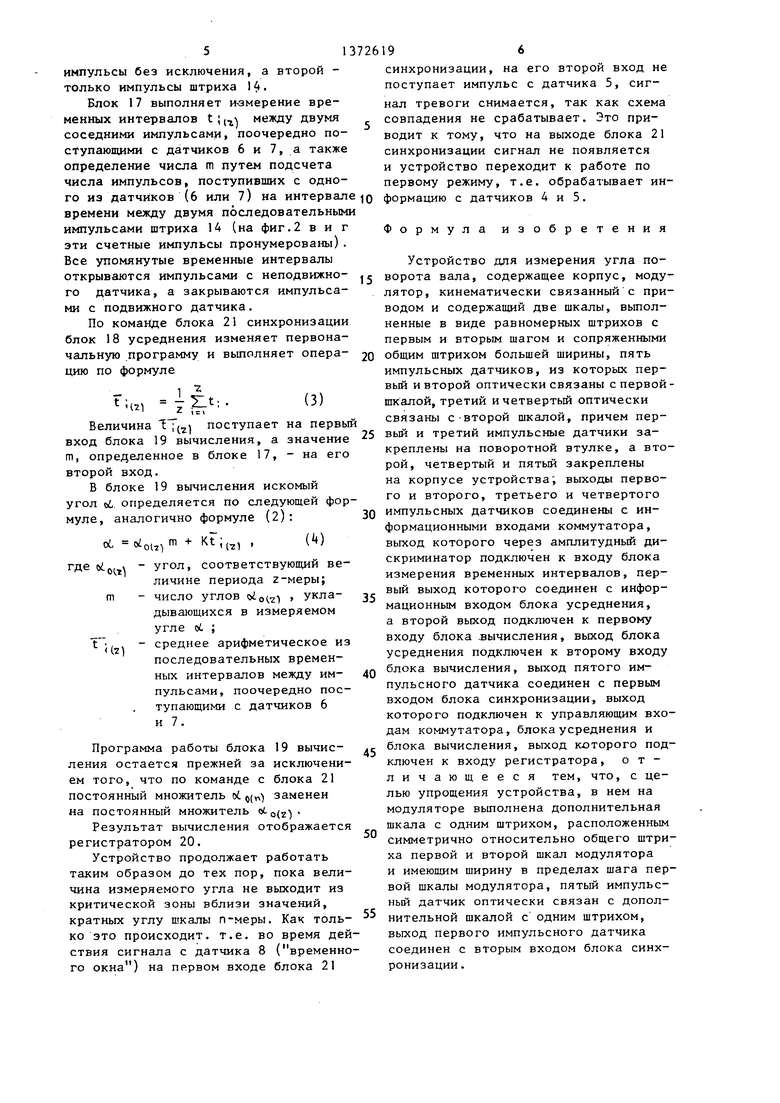
На фиг. 1 представлена структурна схема устройства для измерения угла поворота вала; на фиг. 2 - временные диаграммы его работы.
Устройство содержит корпус 1, модулятор 2, синхронный привод 3, импульсные датчики 4-8, одноштриховую шкалу со штрихом 9, поворотную втул- ку 10 вала II, шкалы п-меры 12 и z-меры 13, обпшй штрих 14, амплитудный дискриминатор 15, коммутатор 16, блок 17 измерения временных интервалов, блоки усреднения 18 и вычислени 19, регистратор 20 и блок 21 синхронизации.
I
Модулятор 2 содержит три шкалы.
Одна шкала одноштриховая, а две дру- гих выполнены в виде равномерных штрихов с числом периодов п и z. п- и z-Меры имеют один общий штрих 14, а значения п и z близки между собой. Штрих 9 расположен симметрич- но относительно общего штриха 14. Импульсные датчики 4, 6 и 8 укреплены на корпусе, а датчики 5 и 7 - на поворотной втулке 10, которая связана с валом 11. Все три меры соосны между собой, соосны с валом привода 3 и валом 11. Со шкалой 12 сопряжены датчики 4 и 5, со шкалой 13 - датчики 6 и 7, а со штрихом 9 - датчик 8. Все датчики выполнены в виде оптопа- ры. Маркировка импульсов на выходе датчиков 4-7 выполнена от одного общего штриха 14, который значимо отличается от других штрихов шкап п- и z-мер, например, за счет его большей ширины. Наличие общего для обеих мер маркировочного штриха обеспечивает единый нуль - отсчет угла поворота. При проектировании устройства должны быть учтены конкретные условия его применения, в первую очередь максимальная скорость контролируемого вала, а скорость вращения модулятора должна быть выбрана много большей скорости вращения контролируемого вала.
Устройство работает следующим образом.
Подают питание U на привод 3 и приводят модулятор 2 во вращение с постоянной скоростью. Штрихи модулятора, пересекая световой поток опто- пар (импульсных датчиков 4-7), возбуждают импульсы тока на выходе этих датчиков. Импульсы от всех штрихов шкал п- и z-мер одинаковы по своим параметрам, за исключением тех, что возбуждены штрихом 14. Такие маркированные импульсы отличаются от остальных по амплитуде как возбужденные большим световым потоком.
Таким образом, за один оборот модулятора возникают всего четыре маркированных импульса: два с датчиков 4 и 5, сопряженных со шкалой п-меры, и два с датчиков 6 и 7, сопряженных со шкалой z-меры.
На диаграммах импульсов, поступающих с датчиков 4-7, обозначены: Т - период оборота модулятора; totni o(T) временной интервал между двумя соседними импульсами, поступающими с одноименного датчика; t,t,...,t. - (t, ,t2 , .. . ,t временные интервалы между импульсами, поочередно поступающим с неподвижного 4 (6) и подвижного 5 () датчиков; Т - временной интервал между двумя импульсами общего штриха, соответствующий действительному измеряемому углу; t -импульс общего щтриха.
Так как оси неподвижных (и связанных с валом) датчиков согласованы между собой, то временной интервал Т, возбуждаемый штрихом 14, будет один и тот же при измерении шкалами п- и z-меры.
Для примера показан случай измерения угла (фиг.2), когда при контроле как п-, так и z-мерой ( где m - число ступеней грубого отсчета).
Основным режимом работы является измерение угла поворота вала с помощью шкалы п-меры и сопряженных с ней датчиков 4 и 5. В этом случае импульсы с датчиков 4 и 5 поступают на первый вход коммутатора 16, который нормально подключен к амплитудному дискриминатору 15. Последний выдает на блок 17 измерения временных интерва- лов два потока импульсов: первый содержит все импульсы без исключения, а второй - только импульсы общего штриха 14. Блок 17 производит измерение временных интервалов t ; между двумя соседними импульсами, поочередно поступающими с датчиков 4 и 5, а также определение числа m путем подсчета числа импульсов, поступающих с одного из датчиков (4 или 5) на интервсше времени между двумя последовательными маркированными импульсами (на фиг.2а и б эти счетные импульсы пронумерованы).
Блок 18 усреднения вьшолняет one- рацию по формуле
iH
}i вьщает результат на блок 19 вычис- ления, на второй вход которого поступает сигнал, соответствующий значению т.
В блоке 19 вычисления результат измерения (искомый угол) определяется по формуле
0,01 + К-Г:(,1, (2)
иг jQ
15
20
25 ,
40
jO 55
где (х:0(4 - угол, соответствующий величине периода п-меры; m - число углов (п1 вающихся в измеряемом угле вС ;
t; - среднее арифметическое из п последовательных временных интервалов t j между импульсами, поочередно поступающими с датчиков 4 и 5;
К - коэффициент преобразования (ед.угла/ед.времени). Результат измерения отображается регистратором 20.
В случае, когда измеряемый угол попадает в окрестность значений, кратных величине периода п-меры и возникает опасность сбоя, происходит следующее. Штрих 9, проходя мимо датчика 8, возбуждает сигнал, который приходит на первый вход блока 21 синхронизации. Во время действия этого сигнала, а фактически временного окна, сформированного штрихом 9, имеющего ширину в пределах периода первой шкалы, с датчика 5 поступает импульс, который приходит на второй вход блока 21 синхронизации. Сраба- тьшает схема совпадения и блок 21 синхронизации выдает сигнал тревоги. Поскольку штрих 9 имеет большую ширину и расположен симметрично относительно штриха шкалы п-меры, то и сигнал тревоги возникает при попадании измеряемого угла в симметричную зону (временное окно) относительно кратных значений измеряемого угла О, обо 2бг. ,. . ., (п-1)(Хо.
Таким образом, в каждом обороте модулятора происходит определение то- го, находится ли измеряемый угол в критической зоне п-меры, и, если это так, то выдается сигнал перехода на работу со шкалой 2-меры.
Блок 21 синхронизации, содержащий схему совпадения, триггер и усилитель его выходного значения, срабатывает и выдает команду на коммутатор 16 и блоки усреднения 18 и вычисления 19.
Коммутатор 16 размыкает связь датчиков 4 и 5 с амплитудным дискриминатором 15 и подключает на его вход датчики 6 и 7, сопряженные со шкалой z-меры. Как и в первом режиме, амплитудный дискриминатор формирует два потока импульсов: один содержит все
51
импульсы без исключения, а второй - только импульсы штриха 14.
Блок 17 выполняет измерение временных интервалов t между двумя соседними импульсами, поочередно поступающими с датчиков 6 и 7, а также определение числа m путем подсчета числа импульсов, поступивших с одного из датчиков (б или 7) на интервал времени между двумя последовательным импульсами штриха 14 (на фиг.2 виг эти счетные импульсы пронумерованы). Все упомянутые временные интервалы открываются импульсами с неподвижно- го датчика, а закрываются импульсами с подвижного датчика.
По команде блока 21 синхронизации блок 18 усреднения изменяет первоначальную программу и вьшолняет опера- цию по формуле
Г;„, Tilt;.(3)
421
Величина ,( поступает на первы вход блока 19 вычисления, а значение т, определенное в блоке 17, - на его второй вход.
В блоке 19 вычисления искомый угол й6. определяется по следующей формуле, аналогично формуле (2):
ОС oiol7)i + (
где CKl.(j, - угол, соответствующий величине периода z-меры; m - число углов ijioui Укла- дывающихся в измеряемом угле oi ;
Т;, - среднее арифметическое из последовательных временных интервалов между им- пульсами, поочередно поступающими с датчиков 6 и 7.
Программа работы блока 19 вычис- ления остается прежней за исключением того, что по команде с блока 21 постоянный множитель oi („) заменен на постоянный множитель o -o{zV
Результат вычисления отображается регистратором 20.
Устройство продолжает работать таким образом до тех пор, пока величина измеряемого угла не выходит из критической зоны вблизи значений, кратных углу шкапы п-меры. Как толь- ко это происходит, т.е. во время действия сигнала с датчика 8 (временного окна) на первом входе блока 21
г
0
0
5
0
с
0
196
синхронизации, на его второй вход не поступает импульс с датчика 5, сигнал тревоги снимается, так как схема совпадения не срабатывает. Это приводит к тому, что на вьпсоде блока 21 синхронизации сигнал не появляется и устройство переходит к работе по первому режиму, т.е. обрабатывает информацию с датчиков А и 5.
Формула изобретения
Устройство для измерения угла поворота вала, содержащее корпус, модулятор, кинематически связанный с приводом и содержащий две шкалы, выполненные в виде равномерных штрихов с первым и вторым шагом и сопряженными общим штрихом большей ширины, пять импульсных датчиков, из которых первый и второй оптически связаны с первой- шкалой, третий и четвертый оптически связаны с Второй шкалой, причем первый и третий импульсные датчики закреплены на поворотной втулке, а второй, четвертый и пятый закреплены на корпусе устройства; выходы первого и второго, третьего и четвертого импульсных датчиков соединены с информационными входами коммутатора, выход которого через амплитудный дискриминатор подключен к входу блока измерения временных интервалов, первый выход которого соединен с информационным входом блока усреднения, а второй выход подключен к первому входу блока вычисления, выход блока усреднения подключен к второму входу блока вычисления, выход пятого импульсного датчика соединен с первым входом блока синхронизации, выход которого подключен к управляющим входам коммутатора, блока усреднения и блока вычисления, выход которого подключен к входу регистратора, отличающееся тем, что, с целью упрощения устройства, в нем на модуляторе вьтолнена дополнительная шкала с одним штрихом, расположенным симметрично относительно общего штриха первой и второй шкал модулятора и имеющим ширину в пределах шага первой шкалы модулятора, пятый импульсный датчик оптически связан с дополнительной шкалой с одним штрихом, выход первого импульсного датчика соединен с вторым входом блока синхронизации.
| Туричин А,М, Электрические измерения неэлектрических величин.-М.: Энергия, 1966, с, 459, Авторское свидетельство СССР № 1264340, кл, Н 03 М 1/24, 1984. |
