to
О) 4
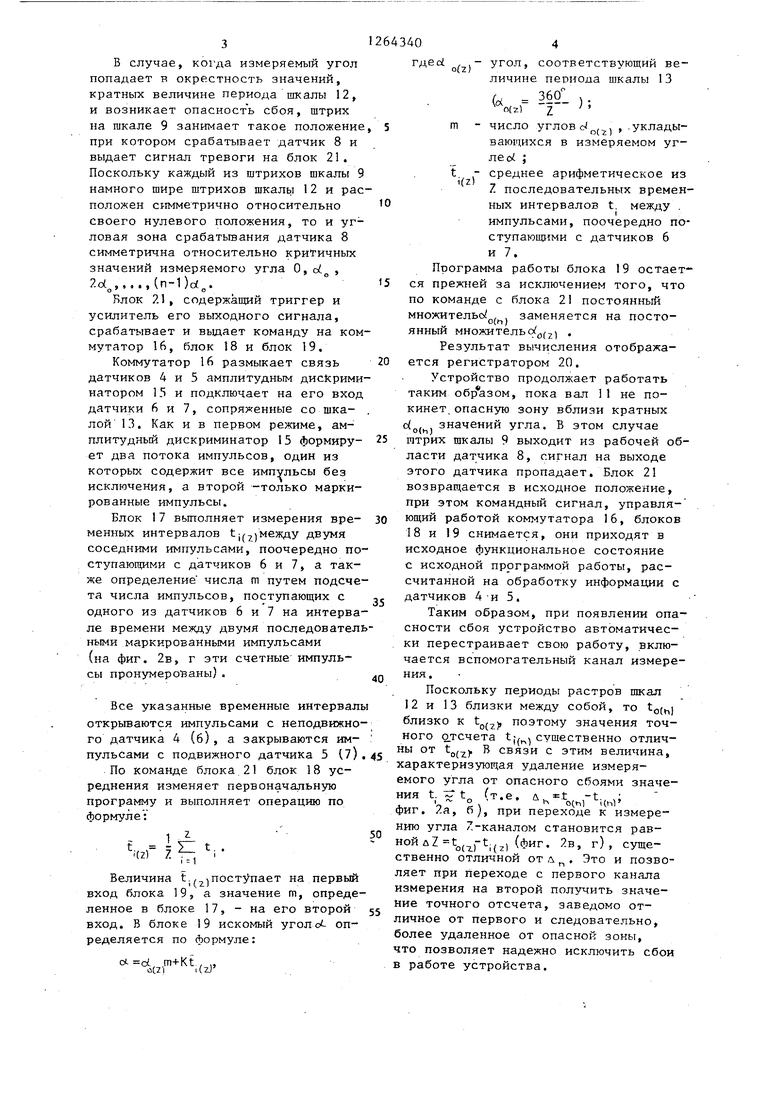
СО .4 1 . 1 Изобретение относится к измерительной технике и может быть использовано для высокоточного измерения углов поворота. Цель изобретения - повышение точности и надежности устройства. На фиг. I приведена структурная схема устройства для измерения угла поворота.валаj на фиг. 2 - временные диаграммы, поясняющие его работу. Устройство содержит корпус 1, модулятор 2, привод 3, имйульсные датчики 4-8, шкалу 9 в виде штрихового растра, поворотную втулку 10, вал 11, шкалу I2 в виде п-штрихового растра, шкалу 13 в виде Z-штрихового растра, штрих 14, соответствующий на чальному отсчету шкап 12 и 13, амплйтудный дискриминатор 15, коммутатор 16, блок 17 измерения временного интервала, блок 18 усреднения, блок 19 вьтисления, регистратор 20, йпрк 21 синхронизации и диск 22. Устройство работает следующим образом. Подают питание на привод 3 и приводят модулятор 2 во вращение с постоянной скоростью. Штрихи шкал 12 и13 возбуждают импульсы тока на выходе импульсных датчиков 4-7. Импулв сы от всех птрихов шкал 12 и 13 да исключением тех, которые возбуждены маркированным штрихом 4, одинаковы по своим параметрам. Такие импульсы отличаются от остальных, например, по амплитуде. За один оборот модулятора 2 возникают четыре маркированных импульса, соответствующие штриху 14: два с датчиков 4 и 5, и два с датчиков 6 и 7. На фиг. 2 приведены диаграммы им пульсов, поступающих с датчиков 4-7 соответственно. На временных диаграммах обозначены: Т - период оборота модулятора 2 t ,, tpj)- временной интервал между двумя соседними импульсами, посту, пающими с одного из датчиков 5-7; t,t2,... ,t(t ,tj,...,t.,) - временные интервалы между импульсами, поочередно поступающими с неподвижного датчика 4 (б) и подвижного датчика 5 (7); Т - временной интервал между двумя маркированными импульсами, соответствующий действительному измеряемому углу о(; - маркированный импульс. 0 Так как измерительные оси неподвижных (и связанных с валом)датчиков 4-7 согласованы между собой, то временной интервал Т , возбуждаемый маркированным штрихом, - один и тот же при измерений по шкалам 12 и 13. Основным режимом работы принимают измерение угла поворота в.ала с помощью шкалы 12 и сопряженных с ней датчиков 4 и 5. В этом случае импуль- сы с датчиков -4 и 5 поступают на вход коммутатора 16, который подключен к амплитудному дискриминатору 15. Последний выдает на блок 17 измерения два потока импульсов: первый содержит все импульсы без исключения, а второй только маркированные импульсы. Блок I7 производит измерение временных интервалов между двумя соседними импульсами, поочередно поступающими с датчиков 4 и 5, а также определение числа m путем подсчета числа импульсов, поступающих с одного из датчиков (4 или 5) на интервале времени между двумя последовательными маркированными импульсами (на фиг. 2а, б эти счетные импульсы пронумерованы) . Блок 18 усреднения выполняет операцию по формуле: t. 1 Ки) П.и выдает результат на блок 19 вычисления, на второй вход которого поступает сигнал, соответствующий значению т. В блоке 19 результат измерения (искомый уголо ) определяется по формуле о( 0/, :m+Kt. ,, Oth) l(n) rnedyf j- угол,соответствующий величине периода шкалы 12 360° . -о(ьГ п - число углов сз/ -oW Уклады. вающихся в измеряемом угле ct ; -среднее арифметическое из п .последовательных временных интервалов t. между импульсами, поочередно поступающими .с датчиков 4 и 5; -коэффициент преобразования ед. угла/ед. времени. Результат измерения отображается регистратором 20. 3 в случае, ко1да измеряемый угол попадает в окрестность значений, кратных величине периода шкалы 12, и возникает опасность сбоя, штрих на шкале 9 занимает такое положени при котором срабатывает датчик 8 и выдает сигнал тревоги на блок 21. Поскольку каждый из штрихов шкалы намного шире штрихов шкалы 12 и ра положен симметрично относительно своего нулевого положения, то и уг ловая зона срабатьюания датчика 8 симметрична относительно критичных значений измеряемого угла О, о. , 2Ы,,,., (n-Dd. Блок 21 , содвржаШ1ИЙ триггер и усилитель его выходного сигнала, срабатывает и выдает команду на ком мутатор 16, блок 18 и блок 19. Коммутатор 16 размыкает связь датчиков 4 и 5 амплитудным дискрими натором 15 и подключает на его вхо датчики 6 и 7, сопряженные со шкалой13, Как и в первом режиме, амплитудный дискриминатор 15 формирует два потока импульсов, один из которых содержит все импульсы без исключения, а второй -только маркированные импульсы. Блок 17 выполняет измерения временных интервалов 1|/)Между двумя соседними импульсами, поочередно по ступающими с датчиков 6 и 7, а также определение числа m путем подсче та числа импульсов, поступающих с одного из датчиков 6 и 7 на интерва ле времени между двумя последовател ными маркированными импульсами (на фиг. 2в, г эти счетные импульсы пронумерованы). Все указанные временные интервал открьгоаются импульсами с неподвижно го датчика 4 (б), а закрываются импульсами с подвижного датчика 5 (7) По команде блока 21 блок 1В усреднения изменяет первоначальную программу и выполняет операцию по формуле: ..г Величина t. ,.поступает на первый вход блока 19, а значение т, опреде ленное в блоке 17, - на его второй вход. В блоке 19 искомый угол о- определяется по формуле: ci Ы m+Kt,, ,, ОС7) .(Z) 40 , ,- угол, соответствующий величине периода шкалы 13 (d 2§9l ). 0(2) Z m - число углов , , .укладывающихся в измеряемом угле oi ; t. - среднее арифметическое из 7. последовательных временных интервалов t. между . импульсами, поочередно поступаю1Щ1ми с датчиков 6 и 7. Программа работы блока 19 остается прежней за исключением того, что по команде с блока 21 постоянный множитель заменяется на постоянный множительо д(2) . Результат вычисления отображается регистратором 20. Устройство продолжает работать таким , пока вал 1 1 не покинет, опаснзпо зону вблизи кратных с(„. , значений угла. В этом случае штрих шкалы 9 выходит из рабочей области датчика 8, сигнал на выходе этого датчика пропадает. Блок 21 возвращается в исходное положение, при этом командный сигнал, управляющий работой коммутатора 16, блоков 18 и 19 снимается, они приходят в исходное функциональное состояние с исходной программой работы, рассчитанной на обработку информации с датчиков 4-и 5. Таким образом, при появлении опасности сбоя устройство автоматически перестраивает свою работу, включается вспомогательный канал измереПоскольку периоды растров шкал 12 и 13 близки между собой, то to(j близко к ), поэтому значения точного отсчета tj существенно отличы от tpj-j В связи с этим величина, арактеризующая удаление измерямого угла от опасного сбоями значе о (т.е. A.-Vft.,,,; иг. /.а, б;, при переходе к измереию угла Z-каналом становится равой AZ t.j(-t.j, (фиг. 2в, г), сущетвенно отличной от д . Это и позвояет при переходе с первого канала змерения на второй получить значеие точного отсчета, заведомо отичное от первого и следовательно, олее удаленное от опасной зоны, то позволяет надежно исключить сбои работе устройства. 5 Формула изобретени Устройство для измерения угла по ворота вала, содержащее корпус, внутри которого расположены модулятор с приводом, два импульсных датчика, первый импульсный датчик закреплен на корпусе, а второй импуль сный датчик - на поворотной втулке, соединенной с валом, на модуляторе размещена первая шкала, вьшолненная в виде растра линий одной ширины с первым шагом, первый и второй импульсные датчики расположены против первой шкалы, амплитудный дискриминатор, блок вычисления, блок усреднения, регистратор, отличающ е ее я тем, что, с целью повышения точности и надежности устройства, в него введены коммутатор, блок измерения временного интервала блок синхронизации, третий, четвертый и пятый импульсные датчики, вто рая шкала, выполненная в виде растра из линий другой ширины с вторым шагом, третья шкала, выполненная в виде растра из линий одной ширины с вторым шагом, диск, на боковой поверхности которого размеш;ена вторая шкала, диск расположен на вход0ном валу, третья шкала расположена на модуляторе так, что начала первой и третьей шкал совмещены, причем ширина начальных штрихов первой и третьей шкал больше ширины остальных штрихов этих шкал, третий и пятьй импульсные датчики расположены на корпусе, четвертьш импульсный датчик - на поворотной втулке, третий и четвертый импульсные датчики размещены против третьей шкалы, пятый импульсный датчик размешен против второй шкалы, выходы первого, второго, третьего и четвертого импульсных датчиков соединены с входами коммутатора, выход которого соединен через амплитудный дискриминатор с входом блока измерения временного интервала, первый выход которого соединен с информационным входом блока усреднения, выход которого соединен с первым входом блока вычисления, второй вход которого соединен с -вторым выходом блока измерения временного интервала, а выход - с входом регистратора, выход пятого импульсного датчика соединен через блок синхронизации с управляющими входами коммутатора, блока усреднения и блока вычисления.
(pt/e.Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла поворота вала | 1986 |
|
SU1372619A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1990 |
|
RU2020408C1 |
| Устройство для измерения угла поворота вала | 1986 |
|
SU1432406A1 |
| Устройство для измерения угла поворота вала | 1979 |
|
SU1023196A1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| Цифровой тахометр | 1983 |
|
SU1348735A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для измерения угла поворота объекта | 1987 |
|
SU1567877A1 |
| Устройство для контроля угла пово-POTA плАТфОРМы | 1979 |
|
SU796655A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |

Изобретение относится к области измерительной техники и может быть использовано для высокоточного измерения углов поворота. Целью изобретения является повышение точности и надежности устройства. Для этого в устройство ДЛЯ измерения угла поворота вала, содержащее корпус, первую шкалу, модулятор с приводом, два импульсных датчика, поворотную втулку, вал, амплитудный дискриминатор, блок усреднения, блок вычисления, регистратор, введены три импульсных датчика, вторая и третья шкалы, коммутатор, блок синхронизации, диск. Поставленная цель достигается путем исключения неопределенных ситуаций, возникающих при измерении на первой шкале.путем переключения измерительного канала с первой шкалы на вторую шкалу. Моменты переключения первой и второй шкал S определяются с помощью третьей шка(Л лы, штрихи растра которой шире, чем с у первой и второй шкал. 2 ил.
| Туричин A.M | |||
| Электрические измерения неэлектрических величин, М,-Л.: Энергия, 1966, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Устройство для измерения угла поворота вала | 1979 |
|
SU1023196A1 |
| Г, П1 В 11/26, 1982 | |||
